基于VS与OpenCV的模板匹配学习(2):边缘匹配+图像金字塔
基于VS与OpenCV的模板匹配学习(2)
边缘模板匹配+图像金字塔
基于C++与OpenCV的模板匹配学习(1)OpenCV matchTemplate()示例
文章目录
- 基于VS与OpenCV的模板匹配学习(2)
- 边缘模板匹配+图像金字塔
- 前言
- 一、边缘检测
-
- 1.1 边缘检测的一般步骤
- 1.2 sobel算子
- 1.3 canny算子
- 1.4 OpenCV sobel与canny函数
- 1.5 OpenCV findContours函数
- 二、边缘匹配算法
-
- 2.1 图像读入
- 2.2 模板轮廓点提取
- 2.3 计算模板轮廓的dx,dy,mag,log
- 2.4 计算原图像的dx,dy,mag,log
- 2.5 最优匹配点寻找
- 2.6 Bug调试
- 2.7 算法结果展示
- 三、图像金字塔
-
- 3.1 图像金字塔基本原理
- 3.2 OpenCV pyrDown函数
- 3.3 高斯金字塔具体实现
- 3.4 图像金字塔优化结果
前言
在基于C++与OpenCV的模板匹配学习(1)OpenCV matchTemplate()示例中,以OpenCV库的内置函数matchTemplate()为例,展示了基于灰度值的模板匹配算法的效果。尽管算法在示例程序中,匹配效果良好。但在工程应用中,表现出两点缺陷。
(1)在光照条件发生变化时,基于灰度值的模板匹配算法表现较差。
(2)假定原图像像素点个数为m,模板图像像素点个数为n,模板匹配算法的时间复杂度为T(mn),当原图像为2048*2048时,算法的运算时间较长。
为解决上述问题,鉴于图像的边缘很少受光线变化的影响这一光学特性,开始探究基于边缘/轮廓的模板匹配算法;此外,开始结合图像金字塔进行算法时间的优化。
一、边缘检测
这一部分主要讲解下面会用到的有关边缘模板匹配的一些相关知识。例如:常用canny、sobel算子。
1.1 边缘检测的一般步骤
滤波:边缘检测的算法基于图像强度的一阶和二阶导数,导数通常对噪声敏感,因此采用滤波器来改善边缘滤波器的性能。例如高斯滤波,利用高斯核对灰度矩阵加权求和。
增强:边缘增强基于确定图像各点领域强度的变化值,可计算梯度幅值。
检测:采用方法对增强图像的某些边缘点进行取舍,可通过阈值化方法。
1.2 sobel算子
sobel算子用于边缘检测的离散微分算子,结合高斯平滑和微分求导,计算灰度图像的近似梯度。在图像的任何一点使用sobel算子,可得到对应的梯度矢量。
sobel算子的计算过程:
-
在x和y方向求导:

-
近似梯度:

1.3 canny算子
canny边缘检测算子是John F.Canny于1986年开发的一个多级边缘检测算法,也是目前被很多人推崇为最优的边缘检测的算法。
canny边缘检测的步骤一般分为以下几步:
(1)消除噪声
高斯平滑滤波器,以下显示了size=5的高斯内核示例。
(2)计算梯度幅度与方向,参考sobel算子操作
(3)非极大值抑制
排除非边缘像素,仅仅保留了一些细线条。
(4)滞后阈值
canny使用了滞后阈值,滞后阈值需要两个阈值,高阈值与低阈值。阈值定义如下:
若某一像素的幅值高于高阈值,像素保留为边缘像素。
若某一像素的幅值低于低阈值,像素被排除。
若某一像素的阈值在高低阈值之间,且像素连接到一个边缘像素,该像素保留。
总结,canny设置高低阈值,会保留高于高阈值的像素点以及像素点周围一层像素点。
1.4 OpenCV sobel与canny函数
OpenCV有sobel算子与canny算子,这为我们进行边缘检测操作提供了便利。
sobel(InputArray src,OutArray dst,int ddepth,int dx,int dy,int ksize=3,double scale=1,double delta=0,int borderType=BORDER_DEFAULT)
(1)src、dst为Mat型的输入图像与输出图像
(2)ddepth为输出图像的深度,可理解为图像的位深。
(3)dx、dy为x和y方向上的差分阶数。
(4)ksize为Sobel核的大小,必须取奇数。
(5)sacle缩放因子,delta默认0,borderType边界模式。
canny(InputArray image,OutputArray edges,double threshold1,double threshold2,int apertyewSize=3,bool L2gradient=false)
(1)image、edges为Mat型的输入图像与输出图像
(2)threshold1、threshold2为高低阈值。
(3)apertyewSize表示应用Sobel算子孔径。
(4)L2gradient为计算图像梯度的标识。
1.5 OpenCV findContours函数
在后面的示例中,会使用到findContours()函数,因此先行讲解。在OpenCV,该函数从二值函数中查找轮廓。
findContours(InputArray image,OutputArray contours,OutputArray hierarchy,int mode,int method,Point offset)
(1)image为输入图像,图像的非零像素被视为1,0像素被保留为0,因此图像为二进制图像。
(2)contours为检测的轮廓,每个轮廓存储为一个点向量,用Point类型的vector表示。
(3)hierarchy包含图像的拓扑信息,每个轮廓contour[i]对应四个hierarchy元素hierarchy[i][0]-hierarchy[i][3],分别表示后一个轮廓,前一个轮廓,父轮廓,内嵌轮廓的索引编号。
(4)mode为轮廓检索模式,RETR_EXTERNAL为只检测最外层轮廓,RETR_LIST为检测所有轮廓并不建立等级关系,RETR_CCOMP检测所有轮廓并组织为双层结构,RETR_TREE检测所有轮廓并建立网状的轮廓结构。
(5)method为轮廓近似方法,CHAIN_APPROX_NONE获取每个轮廓的每个像素,CHAIN_APPROX_SIMPLE压缩水平和垂直方向,只保存方向的终点坐标。
二、边缘匹配算法
本文的边缘匹配算法思想源于印度小哥写的开源项目。
Edge Based Template Matching
当然,如果觉得印度小哥的代码不容易理解,这边建议参考。
edgebased_template_matching.cpp
本文参考的代码主要为edgebased_template_matching.cpp。
开源代码存在一些坑,已经成功调试与修改。
下面对代码进行详解。
2.1 图像读入
代码如下:
Mat src = imread("D:/images/search2.jpg");
Mat tpl = imread("D:/images/template.jpg");
if (src.empty() || tpl.empty()) {
printf("could not load images...\n");
return -1;
}
namedWindow("source", WINDOW_AUTOSIZE);
namedWindow("template", WINDOW_AUTOSIZE);
imshow("source", src);
imshow("template", tpl);
原图像和模板图像的读取,并分别显示。
2.2 模板轮廓点提取
代码如下:
Mat gray, binary;
cvtColor(tpl, gray, COLOR_BGR2GRAY);
Canny(gray, binary, 100, 800);
vector<vector<Point>> contours;
vector<Vec4i> hireachy;
findContours(binary, contours, hireachy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(-1, -1));
cvtColor将原图像由彩图转化为灰度图;
Canny对图像进行边缘检测,将图像变为0-1图像。
findContours找出模板图像的轮廓点。
2.3 计算模板轮廓的dx,dy,mag,log
代码如下:
Mat gx, gy;
Sobel(gray, gx, CV_32F, 1, 0);
Sobel(gray, gy, CV_32F, 0, 1);
Mat magnitude, direction;
cartToPolar(gx, gy, magnitude, direction);
long contoursLength = 0;
double magnitudeTemp = 0;
int originx = contours[0][0].x;
int originy = contours[0][0].y;
// 提取dx\dy\mag\log信息
vector<vector<ptin>> contoursInfo;
// 提取相对坐标位置
vector<vector<Point>> contoursRelative;
// 开始提取
for (int i = 0; i < contours.size(); i++) {
int n = contours[i].size();
contoursLength += n;
contoursInfo.push_back(vector<ptin>(n));
vector<Point> points(n);
for (int j = 0; j < n; j++) {
int x = contours[i][j].x;
int y = contours[i][j].y;
points[j].x = x - originx;
points[j].y = y - originy;
ptin pointInfo;
pointInfo.DerivativeX = gx.at<float>(y, x);
pointInfo.DerivativeY = gy.at<float>(y, x);
magnitudeTemp = magnitude.at<float>(y, x);
pointInfo.Magnitude = magnitudeTemp;
if (magnitudeTemp != 0)
pointInfo.MagnitudeN = 1 / magnitudeTemp;
contoursInfo[i][j] = pointInfo;
}
contoursRelative.push_back(points);
}
这一部分比较冗长,主要内容为计算模板图像每个轮廓点的x和y方向的导数以及幅度与相位。
2.4 计算原图像的dx,dy,mag,log
代码如下:
// 计算目标图像梯度
Mat grayImage;
cvtColor(src, grayImage, COLOR_BGR2GRAY);
Mat gradx, grady;
Sobel(grayImage, gradx, CV_32F, 1, 0);
Sobel(grayImage, grady, CV_32F, 0, 1);
Mat mag, angle;
cartToPolar(gradx, grady, mag, angle);
计算原图像的每个像素点的x和y方向的导数以及幅度与相位。
2.5 最优匹配点寻找
代码如下:
long totalLength = contoursLength;
double nMinScore = minScore / totalLength; // normalized min score
double nGreediness = (1 - greediness * minScore) / (1 - greediness) / totalLength;
double partialScore = 0;
double resultScore = 0;
int resultX = 0;
int resultY = 0;
double start = (double)getTickCount();
for (int row = 0; row < grayImage.rows; row++) {
for (int col = 0; col < grayImage.cols; col++) {
double sum = 0;
long num = 0;
for (int m = 0; m < contoursRelative.size(); m++) {
for (int n = 0; n < contoursRelative[m].size(); n++) {
num += 1;
int curX = col + contoursRelative[m][n].x;
int curY = row + contoursRelative[m][n].y;
if (curX < 0 || curY < 0 || curX > grayImage.cols - 1 || curY > grayImage.rows - 1) {
continue;
}
// 目标边缘梯度
double sdx = gradx.at<float>(curY, curX);
double sdy = grady.at<float>(curY, curX);
// 模板边缘梯度
double tdx = contoursInfo[m][n].DerivativeX;
double tdy = contoursInfo[m][n].DerivativeY;
// 计算匹配
if ((sdy != 0 || sdx != 0) && (tdx != 0 || tdy != 0))
{
double nMagnitude = mag.at<float>(curY, curX);
if (nMagnitude != 0)
sum += (sdx * tdx + sdy * tdy) * contoursInfo[m][n].MagnitudeN / nMagnitude;
}
// 任意节点score之和必须大于最小阈值
partialScore = sum / num;
if (partialScore < min((minScore - 1) + (nGreediness * num), nMinScore * num))
break;
}
}
// 保存匹配起始点
if (partialScore > resultScore)
{
resultScore = partialScore;
resultX = col;
resultY = row;
}
}
}
这一部分是算法思想实现的核心部分,resultX与resultY用来保存最优匹配点的位置,resultScore用来保存最优匹配点的匹配分数。可以看到,该部分套用了四层循环,时间复杂度为原图像像素点数量与模板图像轮廓点数量的乘积。尽管代码设置了内循环的停止条件,这为代码运行速度带来了些许优化,但当原图像大小较长时,算法的运行时间依然很久。例如在我的场景下,原图像为2048*2048格式,算法运行时间为50s,在后一章结合图像金字塔进行时间的优化。
2.6 Bug调试
源代码存在一些Bug,已经解决并总结如下。
(1)canny参数设置不当:
Canny(gray, binary, 100, 800);
canny函数高阈值设定不当,会导致模板图像找不到轮廓点。建议如下修改:
Canny(gray, binary, 100, 200);
(2)模板轮廓点坐标为负数:
在特定场景,会出现轮廓点x或y坐标出现负数的情况,这会导致后续轮廓点作为数组索引坐标的时候,导致超出数组索引下限。
for (int i = 0; i < contours.size(); i++) {
int n = contours[i].size();
contoursLength += n;
contoursInfo.push_back(vector<ptin>(n));
vector<Point> points(n);
for (int j = 0; j < n; j++) {
int x = contours[i][j].x;
int y = contours[i][j].y;
points[j].x = x - originx;
points[j].y = y - originy;
ptin pointInfo;
pointInfo.DerivativeX = gx.at<float>(y, x);
pointInfo.DerivativeY = gy.at<float>(y, x);
magnitudeTemp = magnitude.at<float>(y, x);
pointInfo.Magnitude = magnitudeTemp;
if (magnitudeTemp != 0)
pointInfo.MagnitudeN = 1 / magnitudeTemp;
contoursInfo[i][j] = pointInfo;
}
contoursRelative.push_back(points);
}
解决如下:
for (int i = 0; i < contours.size(); i++) {
int n = contours[i].size();
contoursLength += n;
contoursInfo.push_back(vector<ptin>(n));
vector<Point> points(n);
for (int j = 0; j < n; j++) {
int x = contours[i][j].x;
int y = contours[i][j].y;
if (x < 0)x = 0;
if (y < 0)y = 0;
points[j].x = x - originx;
points[j].y = y - originy;
ptin pointInfo;
pointInfo.DerivativeX = gx.at<float>(y, x);
pointInfo.DerivativeY = gy.at<float>(y, x);
magnitudeTemp = magnitude.at<float>(y, x);
pointInfo.Magnitude = magnitudeTemp;
if (magnitudeTemp != 0)
pointInfo.MagnitudeN = 1 / magnitudeTemp;
contoursInfo[i][j] = pointInfo;
}
contoursRelative.push_back(points);
}
2.7 算法结果展示
在经过Bug调试后,在我的场景中,代码可以正常运行。输入模板图像与目标图像,匹配结果如下。

根据匹配结果可知,方形边框为结果匹配区域,不难发现,基于边缘梯度的模板匹配在匹配结果上表现良好。其实,可以在不同亮度值进行算法的性能测试,并与基于灰度值的模板匹配进行效率与精度的对比。这边缺乏用于测试的图像数据样本,所以考虑在后续学习中进行综合对比。
三、图像金字塔
上文提到,示例图像为2048*2048时,算法运行时间大概为50s。这是由于算法的时间复杂度为目标图像像素点*模板图像轮廓点,当目标图像像素点个数较高,往往也会导致模板图像的轮廓信息越丰富,因此当目标图像被压缩后,算法速度会得到显著提升。因此,本文考虑结合图像金字塔对算法时间进行优化,首先会介绍图像金字塔的基本原理,然后介绍算法实现与时间优化的结果。
3.1 图像金字塔基本原理
图像金字塔是图像中多尺度表达的一种,主要用于图像的分割。在应用中,图像金字塔最初用于机器视觉和图像压缩,一幅图像的金字塔是一系列以金字塔形状排列的,分辨率逐步降低且来源于同一张原始图的图像集合。金字塔的最底部是原始图像,顶部是低分辨率的近似。
图像金字塔包括高斯金字塔与拉普拉斯金字塔,前者用来向下采样图像,后者用来向上采样,可以对图像进行最大程度的还原,即重建图像。高斯金字塔是通过高斯平滑与亚采样获得一些下采样图像,也就是说第K层高斯金字塔通过平滑、亚采样就可以获得K+1层高斯图像。金字塔的图像如图所示。

3.2 OpenCV pyrDown函数
要从金字塔第i层生成第i+1层,我们先用高斯核进行卷积,然后删除所有的偶数行和偶数列,新得到图像面积会变为源图像的四分之一。对于高斯金字塔,当图像向金字塔的上层移动时,尺寸和分辨率会降低。在OpenCV中,可以通过pyrDown函数进行操作。
pyrDown函数的作用是向下采样并模糊一张图片。
pyrDown(InputArray src,OutputArray dst,const Size&dstSize=Size(),int borderType=BORDER_DEFAULT)
(1)src、dst为Mat型的输入图像与输出图像
(2)const Size&dstSize为输出图像的大小,有默认值Size(),默认情况下,Size((src.cols+1)/2,(src.rows+1)/2)来进行计算。
3.3 高斯金字塔具体实现
基于高斯金字塔,我们使用分层搜索策略:
(1)首先我们根据模板图像与目标图像,计算出需要使用的图像金字塔层数。金字塔层数设置,需要保证最上层目标物体的相关结构必须可辨别出。
(2)然后在最高层金字塔进行一次完整的匹配。高斯金字塔每增加一层,图像点数与模板点数都会减少4倍,每增加一层可以提速16倍,例如在金字塔第四层进行一次完整的匹配,计算次数与原始图像减少了4096倍。
(3)在高层搜索到的匹配结果映射到金字塔的下一层中,直接将匹配得到的匹配点坐标乘2。在下一层的搜索区域定为匹配结果周围的一个区域,一般为5乘5或者7乘7的矩阵区域。
(4)这个过程,直到找不到匹配对象或者到金字塔的最底层结束。
高斯金字塔函数如下所示:
输入源图像与金字塔层数,输出下采样结果图像。
cv::Mat paramidGaussImage(cv::Mat src, int paramidNums)
{
int paramidCount = paramidNums;
cv::Mat srcPre = src;
cv::Mat srcTemp;
while (paramidCount > 1)
{
cv::pyrDown(srcPre, srcTemp, cv::Size(srcPre.cols / 2, srcPre.rows / 2));
srcPre = srcTemp;
paramidCount--;
}
return srcPre;
}
搜索策略实现:
findMatchingPosition输入为当前层数的ROI区域,设置为7乘7的矩阵区域。
findMatchingPosition输出为匹配位置。
int row_min = 0;
int row_max = src.rows;
int col_min = 0;
int col_max = src.cols;
int resultX = 0, resultY = 0;
cv::Mat srcPre, srcTemp, tplPre, tplTemp;
for (int paramidPre = paramidNums; paramidPre >= 1; paramidPre--)
{
cv::Mat srcPre, tplPre;
srcPre = paramidGaussImage(src, paramidPre);
tplPre = paramidGaussImage(tpl, paramidPre);
if (paramidPre - paramidNums == 0)
{
row_min = 0;
row_max = srcPre.rows;
col_min = 0;
col_max = srcPre.cols;
}
paramidPoint = findMatchingPosition(srcPre, tplPre, row_min, row_max, col_min, col_max);
resultX = paramidPoint.x;
resultY = paramidPoint.y;
row_min = resultY * 2 - 3;
row_max = resultY * 2 + 4;
col_min = resultX * 2 - 3;
col_max = resultX * 2 + 4;
}
3.4 图像金字塔优化结果
在本场景中,设置高斯金字塔层数为4层,ROI区域为7乘7。在源图像进行模板匹配的运行时间为50s,经过高斯金字塔的时间优化,结果如下所示。
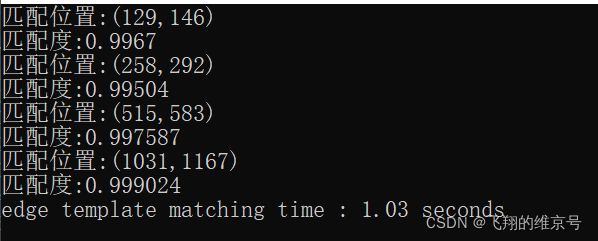
经过高斯金字塔的时间优化,算法运行速度优化到1s,尽管优化效果显著,但是1s的运行时间在大部分工业场景是不能接受的。因此,后续会进一步进行时间的优化。
参考文献:
《机器视觉算法及应用 Machine vision algorithm and Application》
《OpenCV3编程入门》 毛星云 著