LSS-lift splat shoot论文与代码解读
目录
- 序言
-
- 论文
- 代码
- 总结
序言
最近开始学习多摄融合领域了,定义是输入为多个摄像机图像,获得多个视角的相机图像特征,通过相机内外参数进行特征映射到BEV视角,得到360°的视觉感知结果,今天分享的是经典论文LSS。
论文
论文题目:《Lift, Splat, Shoot: Encoding Images from Arbitrary Camera Rigs by Implicitly Unprojecting to 3D》
lift过程:
提取图像特征,根据内外参数得到几何关系,将特征映射到BEV视角。
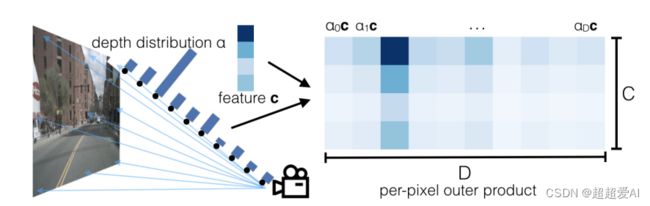
由于空间中的点有可能落到同一个像素上,造成图像深度的模糊性,因此LSS直接预测每一个采样点的深度分布,通过深度分布对相应的图像特征进行加权。每一个采样点,都有对应的加权特征,有对应的几何深度,通过内外参将其投影到BEV视角下,得到BEV空间特征。
splat过程:
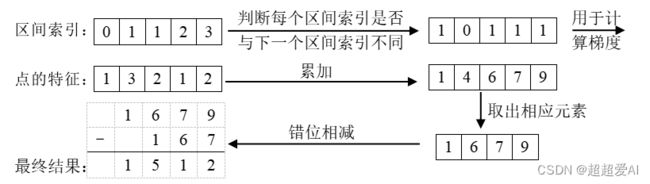
特征映射到BEV视角后,同一个BEV空间的grid存在多个采样点的图像特征,因此需要做“累加和”操作。这里采用了一个累加和小技巧,叫做“棱台池化累加和”,具体如下:
shoot过程:
对splat得到的特征进行编解码处理,实际上可以看作bev特征提取器,将编解码后的特征用于目标任务。
代码
对主要的代码进行解读:
数据读入部分:
得到多摄图像、相机内外参矩阵,以及图像增广对应的旋转和平移矩阵。
def get_image_data(self, rec, cams):
imgs = []
rots = []
trans = []
intrins = []
post_rots = []
post_trans = []
for cam in cams:
samp = self.nusc.get('sample_data', rec['data'][cam])
imgname = os.path.join(self.nusc.dataroot, samp['filename'])
img = Image.open(imgname)
post_rot = torch.eye(2)
post_tran = torch.zeros(2)
sens = self.nusc.get('calibrated_sensor', samp['calibrated_sensor_token'])
intrin = torch.Tensor(sens['camera_intrinsic'])
rot = torch.Tensor(Quaternion(sens['rotation']).rotation_matrix)
tran = torch.Tensor(sens['translation'])
# augmentation (resize, crop, horizontal flip, rotate)
resize, resize_dims, crop, flip, rotate = self.sample_augmentation()
img, post_rot2, post_tran2 = img_transform(img, post_rot, post_tran,
resize=resize,
resize_dims=resize_dims,
crop=crop,
flip=flip,
rotate=rotate,
)
# for convenience, make augmentation matrices 3x3
post_tran = torch.zeros(3)
post_rot = torch.eye(3)
post_tran[:2] = post_tran2
post_rot[:2, :2] = post_rot2
imgs.append(normalize_img(img))
intrins.append(intrin)
rots.append(rot)
trans.append(tran)
post_rots.append(post_rot)
post_trans.append(post_tran)
return (torch.stack(imgs), torch.stack(rots), torch.stack(trans),
torch.stack(intrins), torch.stack(post_rots), torch.stack(post_trans))
世界坐标系下的标注信息转化到车辆坐标系下,得到对应分割的BEV视图。
def get_binimg(self, rec):
egopose = self.nusc.get('ego_pose',
self.nusc.get('sample_data', rec['data']['LIDAR_TOP'])['ego_pose_token'])
trans = -np.array(egopose['translation'])
rot = Quaternion(egopose['rotation']).inverse
img = np.zeros((self.nx[0], self.nx[1]))
for tok in rec['anns']:
inst = self.nusc.get('sample_annotation', tok)
# add category for lyft
if not inst['category_name'].split('.')[0] == 'vehicle':
continue
box = Box(inst['translation'], inst['size'], Quaternion(inst['rotation']))
box.translate(trans)
box.rotate(rot)
pts = box.bottom_corners()[:2].T
pts = np.round(
(pts - self.bx[:2] + self.dx[:2]/2.) / self.dx[:2]
).astype(np.int32)
pts[:, [1, 0]] = pts[:, [0, 1]]
cv2.fillPoly(img, [pts], 1.0)
return torch.Tensor(img).unsqueeze(0)
接下来看模型代码:
看名字是建立视锥体,我觉得应该叫做create_sample_points,因为该部分代码是根据下采样倍率得到对应在输入图像上的采样点,并且在对应的采样点上补充设计的深度坐标,4到45米,41长度的深度。
def create_frustum(self):
# make grid in image plane
ogfH, ogfW = self.data_aug_conf['final_dim']
fH, fW = ogfH // self.downsample, ogfW // self.downsample
ds = torch.arange(*self.grid_conf['dbound'], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW)
D, _, _ = ds.shape
xs = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(1, 1, fW).expand(D, fH, fW)
ys = torch.linspace(0, ogfH - 1, fH, dtype=torch.float).view(1, fH, 1).expand(D, fH, fW)
# D x H x W x 3
frustum = torch.stack((xs, ys, ds), -1)
return nn.Parameter(frustum, requires_grad=False)
这里才是真正的建立视锥体,或者也可以叫做建立视锥点云,这里其实就是位置点,和图像特征一一对应,然后对引导图像特征填入BEV空间中。
def get_geometry(self, rots, trans, intrins, post_rots, post_trans):
"""Determine the (x,y,z) locations (in the ego frame)
of the points in the point cloud.
Returns B x N x D x H/downsample x W/downsample x 3
"""
B, N, _ = trans.shape
# undo post-transformation
# B x N x D x H x W x 3
points = self.frustum - post_trans.view(B, N, 1, 1, 1, 3)
points = torch.inverse(post_rots).view(B, N, 1, 1, 1, 3, 3).matmul(points.unsqueeze(-1))
# cam_to_ego
points = torch.cat((points[:, :, :, :, :, :2] * points[:, :, :, :, :, 2:3],
points[:, :, :, :, :, 2:3]
), 5)
combine = rots.matmul(torch.inverse(intrins))
points = combine.view(B, N, 1, 1, 1, 3, 3).matmul(points).squeeze(-1)
points += trans.view(B, N, 1, 1, 1, 3)
return points
因为很多位置点会落到同一个grid里面,这里会做棱台累加和的操作。最后在一个pillar求平均,这一块代码比较复杂,但做得事情很简单,
def voxel_pooling(self, geom_feats, x):
B, N, D, H, W, C = x.shape
Nprime = B*N*D*H*W
# flatten x
x = x.reshape(Nprime, C)
# flatten indices
geom_feats = ((geom_feats - (self.bx - self.dx/2.)) / self.dx).long()
geom_feats = geom_feats.view(Nprime, 3)
batch_ix = torch.cat([torch.full([Nprime//B, 1], ix,
device=x.device, dtype=torch.long) for ix in range(B)])
geom_feats = torch.cat((geom_feats, batch_ix), 1)
# filter out points that are outside box
kept = (geom_feats[:, 0] >= 0) & (geom_feats[:, 0] < self.nx[0])\
& (geom_feats[:, 1] >= 0) & (geom_feats[:, 1] < self.nx[1])\
& (geom_feats[:, 2] >= 0) & (geom_feats[:, 2] < self.nx[2])
x = x[kept]
geom_feats = geom_feats[kept]
# get tensors from the same voxel next to each other
ranks = geom_feats[:, 0] * (self.nx[1] * self.nx[2] * B)\
+ geom_feats[:, 1] * (self.nx[2] * B)\
+ geom_feats[:, 2] * B\
+ geom_feats[:, 3]
sorts = ranks.argsort()
x, geom_feats, ranks = x[sorts], geom_feats[sorts], ranks[sorts]
# cumsum trick
if not self.use_quickcumsum:
x, geom_feats = cumsum_trick(x, geom_feats, ranks)
else:
x, geom_feats = QuickCumsum.apply(x, geom_feats, ranks)
# griddify (B x C x Z x X x Y)
final = torch.zeros((B, C, self.nx[2], self.nx[0], self.nx[1]), device=x.device)
final[geom_feats[:, 3], :, geom_feats[:, 2], geom_feats[:, 0], geom_feats[:, 1]] = x
# collapse Z
final = torch.cat(final.unbind(dim=2), 1)
return final
其他部分的代码也就比较简单了,这里不做解读了。
总结
理解代码需要储备一些坐标系转换的知识,LSS也是很经典的论文,虽然目前有各种花里胡哨的transformer论文,但自己感觉都是学术界在打榜狂欢,真正有应用价值的论文不多。但这一过程也很正常,毕竟是较新的领域,应该探索不同的途径。
LSS虽然的改进有:
1、加深度监督,比如bevdepth,目前也是sota的基本,在nuscenes检测上目前处于榜单第一。
2、还有一些特征融合的方法的改进,有人认为直接相加并不好,但这一块我没有做调研。
3、还有我自己认为的一些缺点,但目前不公开讨论,写完专利后再说。
国庆节一个人在家,宅着,学习…。唉~