AI小项目
闯红灯检测项目,给定特定场景,检测非机动车是否闯红灯,并形成完整证据链
1、首先检测三种物体(person、bicycle、motorbike)
拟采用Yolov5进行检测,Yolov5在目标检测领域中十分常用,官方Yolov5包括四个版本:Yolov5s、Yolov5m、Yolov5l、Yolov5x四个模型,本次采用Yolov5m。
1.1、数据集介绍
项目拟采用MS COCO数据集,COCO 2017版本包括79个类:
- person
- bicycle
- car
- motorbike
- aeroplane
- bus
- train
- truck
- boat
- traffic light
- ...
本次仅检测person、bicycle、motorbike,下载COCO数据集,源数据集目录格式如下:
train2017
val2017
annotations
caption_train2017.json
caption_val2017.json
instances_train2017.json
instances_val2017.json
person_keypoints_train2017.json
person_keypoints_val2017.json
可以发现,annotations中有三种标注类型,image captions(看图说话)、object instaces(目标实例,用于目标检测)、object keypoints(目标关键点,用于姿态估计),本项目采用object instances。
1.2、数据集处理
需要将数据集提取出我们需要的类,并转成yolo需要的格式。
1.2.1、Yolov5数据格式
yolov5需要什么格式数据呢?根据官方介绍,数据格式应如下:
images
train
img1.jpg
img2.jpg
...
val
img3.jpg
...
labels
train
img1.txt
img2.txt
...
val
img3.txt
...
每个txt文件中应为如下格式:
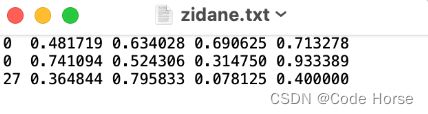
每一列分别对应为类别id、相对中心坐标x、相对中心坐标y、标注框相对宽度w,标注框相对高度h。
1.2.2、COCO数据格式(json)
主要有如下几个字段

info:
"info": { # 数据集信息描述
"description": "COCO 2017 Dataset", # 数据集描述
"url": "http://cocodataset.org", # 下载地址
"version": "1.0", # 版本
"year": 2017, # 年份
"contributor": "COCO Consortium", # 提供者
"date_created": "2017/09/01" # 数据创建日期
},
licenses:
"licenses": [
{
"url": "http://creativecommons.org/licenses/by-nc-sa/2.0/",
"id": 1,
"name": "Attribution-NonCommercial-ShareAlike License"
},
……
……
],
images:
"images": [
{
"license": 4,
"file_name": "000000397133.jpg", # 图片名
"coco_url": "http://images.cocodataset.org/val2017/000000397133.jpg",# 网路地址路径
"height": 427, # 高
"width": 640, # 宽
"date_captured": "2013-11-14 17:02:52", # 数据获取日期
"flickr_url": "http://farm7.staticflickr.com/6116/6255196340_da26cf2c9e_z.jpg",# flickr网路地址
"id": 397133 # 图片的ID编号(每张图片ID是唯一的)
},
……
……
],
categories:
"categories": [ # 类别描述
{
"supercategory": "person", # 主类别
"id": 1, # 类对应的id (0 默认为背景)
"name": "person" # 子类别
},
{
"supercategory": "vehicle",
"id": 2,
"name": "bicycle"
},
{
"supercategory": "vehicle",
"id": 3,
"name": "car"
},
……
……
],
annotations:
"annotation": [
{
"segmentation": [ # 对象的边界点(边界多边形)
[
224.24,297.18,# 第一个点 x,y坐标
228.29,297.18, # 第二个点 x,y坐标
234.91,298.29,
……
……
225.34,297.55
]
],
"area": 1481.3806499999994, # 区域面积
"iscrowd": 0, #
"image_id": 397133, # 对应的图片ID(与images中的ID对应)
"bbox": [217.62,240.54,38.99,57.75], # 定位边框 [x,y,w,h]
"category_id": 44, # 类别ID(与categories中的ID对应)
"id": 82445 # 对象ID,因为每一个图像有不止一个对象,所以要对每一个对象编号(每个对象的ID是唯一的)
},
……
……
]
1.2.3、COCO数据集处理
提取json文件并改为txt格式,json.load()载入json文件,得到images和annotations信息,遍历所有图像,如果当前图像有标注框信息,且所属类为我们需要的类时,写入txt,并copy图像到新文件中。
def json_txt(json_path, txt_path, source_photo, target_photo):
# 生成存放json文件的路径
if not os.path.exists(txt_path):
os.mkdir(txt_path)
# 读取json文件
with open(json_path, 'r') as f:
dictortary = json.load(f)
classes_ids = [1, 2, 4]
classes_ids_myid = {1:0, 2:1, 4:2}
# 得到images和annotations信息
images_value = dictortary.get("images") # 得到某个键下对应的值
annotations_value = dictortary.get("annotations") # 得到某个键下对应的值
# 使用images下的图像名的id创建txt文件
list=[] # 将文件名存储在list中
id2name = dict()
id2height = dict()
id2width = dict()
for i in images_value:
list.append(i.get("id"))
id2name[i.get("id")] = i.get("file_name")
id2height[i.get("id")] = i.get("height")
id2width[i.get("id")] = i.get("width")
# 将id对应图片的bbox写入txt文件中
for i in list: # 所有图像
for j in annotations_value: # 遍历所有annotations
try:
if j.get("image_id") == i and (j.get("category_id") in classes_ids):
# bbox标签归一化处理
box = j.get('bbox')
bbox = convert((id2width[i], id2height[i]), box)
file_name = txt_path + "coco_" + str(i) + '.txt'
if not os.path.exists(file_name):
open(file_name, 'w')
with open(file_name, 'a') as file1: # 写入txt文件中
print(classes_ids_myid[j.get("category_id")], format(bbox[0], '.3f'), format(bbox[1], '.3f'), format(bbox[2], '.3f'), format(bbox[3], '.3f'), file=file1)
imgname = id2name[i]
source_photo_path = source_photo + imgname
target_photo_path = target_photo + "coco_" + str(i) + '.jpg'
if not os.path.exists(target_photo_path):
shutil.copy(source_photo_path, target_photo_path)
except:
print("i == ", i)同时需要将json中bbox中框的绝对位置(,,w, h)转为相对位置(,,w`, h`),通过convert()函数:
def convert(size, box):# 将xmin,ymin,w,h转为相对中心坐标x、相对中心坐标y、标注框相对宽度w,标注框相对高度h。
dw = 1. / size[0]
dh = 1. / size[1]
x = box[0] + box[2] / 2.0
y = box[1] + box[3] / 2.0
w = box[2]
h = box[3]
x = x * dw
w = w * dw
y = y * dh
h = h * dh
return (x, y, w, h)最终目录格式如下:

至此,数据集处理完毕!
1.3、Yolov5训练
在github中下载好Yolov5模型,其中配置十分完备,训练时仅更改几个特殊配置即可:
1、vehicle_detection_data_conf.yaml
2、vehicle_detection_hyper_conf.yaml
3、vehicle_detection_model_conf.yaml
vehicle_detection_data_conf.yaml,配置训练路径及类数:
train: Vehicle_Detection_Dataset/images/train
val: Vehicle_Detection_Dataset/images/val
# number of classes
nc: 3
# class names
names: ['person', 'bicycle', 'motorcycle']vehicle_detection_hyper_conf.yaml,配置超参:
# YOLOv5 by Ultralytics, GPL-3.0 license
# Hyperparameters for VOC finetuning
# python train.py --batch 64 --weights yolov5m.pt --data VOC.yaml --img 512 --epochs 50
# See tutorials for hyperparameter evolution https://github.com/ultralytics/yolov5#tutorials
# Hyperparameter Evolution Results
# Generations: 306
# P R mAP.5 mAP.5:.95 box obj cls
# Metrics: 0.6 0.936 0.896 0.684 0.0115 0.00805 0.00146
lr0: 0.0032
lrf: 0.12
momentum: 0.843
weight_decay: 0.00036
warmup_epochs: 2.0
warmup_momentum: 0.5
warmup_bias_lr: 0.05
box: 0.0296
cls: 0.243
cls_pw: 0.631
obj: 0.301
obj_pw: 0.911
iou_t: 0.2
anchor_t: 2.91
# anchors: 3.63
fl_gamma: 0.0
hsv_h: 0.0138
hsv_s: 0.664
hsv_v: 0.464
degrees: 0.373
translate: 0.245
scale: 0.898
shear: 0.602
perspective: 0.0
flipud: 0.00856
fliplr: 0.5
mosaic: 1.0
mixup: 0.243
copy_paste: 0.0vehicle_detection_model_conf.yaml,配置模型参数
# YOLOv5 by Ultralytics, GPL-3.0 license
# Parameters
nc: 3 # number of classes
depth_multiple: 0.67 # model depth multiple -> compound scaling
width_multiple: 0.75 # layer channel multiple -> compound scaling
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, C3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)之后即可开始训练(train.sh):
python yolov5/train.py --img 640 \
--cfg configs/vehicle_detection/vehicle_detection_model_conf.yaml \
--hyp configs/vehicle_detection/vehicle_detection_hyper_conf.yaml \
--batch -1 \
--weight yolov5m.pt \
--epochs 100 \
--data configs/vehicle_detection/vehicle_detection_data_conf.yaml \
--workers 8 \
--project "configs/vehicle_detection/Model Vehicle Detection" \
--save-period 1