python3 opencv_Python3 OpenCV3 图像处理基础
开发环境搭建
本人使用的是Ubuntu 16.04LTS。
1、安装Python3
## 其实 Ubuntu 16.04 系统自带了 Python 3.5.2,因此不需要再安装了?但是需要安装一些开发环境。
sudo apt-get update #更新系统源
sudo apt-get install python3 python3.5-dev libpython3.5-dev #安装基础包
sudo apt-get install python3-pip #安装 pip3
sudo pip3 install --upgrade pip #更新 pip3
## 测试
$ python3 --version
Python3.5.2
2、安装Numpy,Matplotlib,OpenCV
这些库可以自己下载源码编译,也有别人编译好的,我们直接下载。
## 安装库
sudo pip3 install numpy #安装 numpy,用于在Python中进行科学计算
sudo pip3 install matplotlib #安装 matplotlib,用于显示、绘图等sudo pip3 install opencv-python #安装 opencv
sudo pip3 install opencv-contrib-python #安装opencv-contrib,包含一些其它库,比如xfeature2d
## 确保 OpenCV 已经安装好
$ python3 -c "import cv2;print(cv2.__version__)"
4.0.0
其实在安装opencv-python时会附带安装numpy,matplotlib安装时也会附带numpy,因为它们都依赖于numpy,如图:
至此,环境基本上已经搭建结束。以后的任务就是开发啦。
附:
#各个版本号
python 2.7.12python33.5.2pip8.1.1pip319.0.3numpy1.16.1matplotlib3.0.2opencv-python 4.0.0.12
Numpy的使用
Numpy 是 Python中的科学计算工具包,可以说是Python中的Matlab。支持向量操作、切片操作、广播,支持多种常用数据类型,内置丰富的线性代数、矩阵算法。由于底层使用多为C语言实现,所以有着较快速度。同时以使用Python接口可以方便地使用 Python 的语法,摆脱静态语言的臃肿,从而实现快速建模、计算和验证。
(1) numpy.ndarray 数组的创建
## --- 创建 np.ndarray 数组 ----
importnumpy as np#使用 Python list 创建
mat1 = np.array([[1,2,3], [4,5,6], [7,8,9]])#使用 np.arange 创建
mat2= np.arange(1,10).reshape(3,3)#使用 zeros/ones/eye 创建
mat3 = np.zeros((3,3))
mat4= np.ones((3,3))
mat5= np.eye(3)print(mat1)print(mat2)print(mat3)print(mat4)print(mat5)
(2) numpy.ndarray 的数据类型
## --- numpy 数据类型(默认 np.int64 或 np.float64) -----#内置多种数据类型,如 np.uint8, np.int32, np.float32, np.float64
a = np.array([[1.25, -16],[32,264.75]], np.float32) #32位浮点型
b = np.array(a, np.int32) #32位整形
c = b.astype("uint8") #8位无符号整型(注意会发生溢出)
print(a)"""[[ 1.25 -16. ]
[ 32. 264.75]]"""
print(b)"""[[ 1 -16]
[ 32 264]]"""
print(c)"""[[1 2 3]
[4 5 6]
[7 8 9]]"""
(3) 索引
## ----- 索引(单坐标、切片、掩模) ------
mat = np.arange(1,10).reshape(3,3)print(mat)## 单坐标
print(mat[2][2]) #9
print(mat[2,2]) #9
## 切片操作
print(mat[:2,:2])"""[[1 2]
[4 5]]"""
## 掩模操作
mask = mat>5
print(mask)"""[[False False False]
[False False True]
[ True True True]]"""mat[mask]= 5
print(mat)"""[[1 2 3]
[4 5 5]
[5 5 5]]"""
(4) 广播 (broadcasting)
## ----- numpy 广播机制(broadcasting) ------#https://docs.scipy.org/doc/numpy/user/basics.broadcasting.html#当操作两个 numpy.ndarray 数组时,如果它们的维度满足一定的关系,则可以进行广播操作。
x = np.arange(4) #(4,)
xt = x.reshape(-1,1) #(4,1)
z = np.ones((3,4)) #(3,4)
print(x+xt)"""[[0 1 2 3]
[1 2 3 4]
[2 3 4 5]
[3 4 5 6]]"""
print(x+z)"""[[ 1. 2. 3. 4.]
[ 1. 2. 3. 4.]
[ 1. 2. 3. 4.]]"""
Matplotlib
[Matplotlib](http://matplotlib.org/) 是 Python 中的可视化库,可以用来绘制高质量的 2D 折线图、散点图、柱状图,或者用来显示图像。分别参考
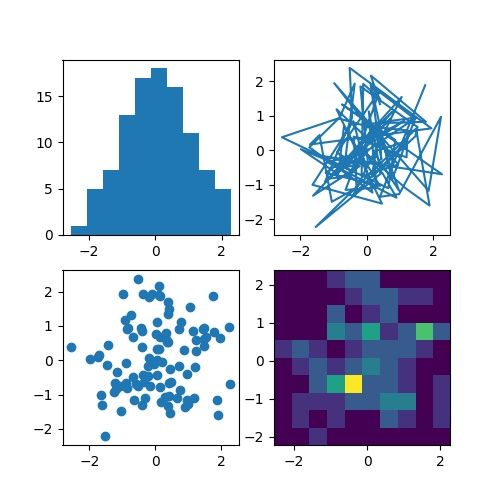
#使用 matplotlib 绘制一些列缩略图(thumbnails),并显示图像#from scipy.misc import imread, imresize
importmatplotlib.pyplot as pltimportmatplotlib.image as mpimgimportnumpy as np## (1) 绘制随机噪点## 初始化随机种子,并生成随机坐标
np.random.seed(0)
data= np.random.randn(2, 100)## 创建画布
fig, axs = plt.subplots(2, 2, figsize=(5, 5))## 绘制子图
axs[0, 0].hist(data[0])
axs[1, 0].scatter(data[0], data[1])
axs[0,1].plot(data[0], data[1])
axs[1, 1].hist2d(data[0], data[1])## 显示
plt.show()## (2) 绘制图像
img = mpimg.imread("/home/auss/Pictures/test.png")
imgx= img[:,:,0] #取第一个通道
## 创建画布
fig =plt.figure()## 绘制原始图像,并加上颜色条
axs = fig.add_subplot(1,3,1)
ipt=plt.imshow(img)
axs.set_title("origin")
plt.colorbar(ticks=[0.1, 0.3, 0.5, 0.7], orientation='horizontal')## 绘制伪彩色图像,并加上颜色条
axs = fig.add_subplot(1,3,2)
ipt= plt.imshow(imgx,cmap="winter")
axs.set_title("winter")
plt.colorbar(ticks=[0.1, 0.3, 0.5, 0.7], orientation='horizontal')## 绘制直方图
axs = fig.add_subplot(1,3,3)
ipt= plt.hist(imgx.ravel(), bins=256, range=(0, 1.0), fc='k', ec='k')
axs.set_title("histogram")
plt.show()

OpenCV的简单应用
铺垫了这么久,终于到了 OpenCV 了。 OpenCV 的 Python 接口名称为 cv2。通常 OpenCV 内部的算法已经很丰富了,并且提供了 highgui 模块用于显示图像(不过可能有的没有编译该模块)。如果需要进行拓展,则可以配合着 Numpy 进行计算,并结合 Matplotlib 进行显示。
注意,matplotlib 中图像通道为 RGB,而 OpenCV 中图像通道为 BGR。因此进行显示的时候,要注意交换通道的顺序。
这里给出一个 Canny 边缘检测的例子,涉及到图像读写、色彩空间转换、滤波、Canny边缘检测、掩模赋值操作等。
#!/usr/bin/python3#2017.11.02 17:31:24 CST#2017.11.02 17:51:13 CST
importcv2importnumpy as np
img= cv2.imread("firefox.png")## BGR => Gray; 高斯滤波; Canny 边缘检测
gray =cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gaussed= cv2.GaussianBlur(gray, (3,3), 0)
cannyed= cv2.Canny(gaussed, 10, 220)## 将灰度边缘转化为BGR
cannyed2 =cv2.cvtColor(cannyed, cv2.COLOR_GRAY2BGR)## 创建彩色边缘
mask = cannyed > 0 #边缘掩模
canvas = np.zeros_like(img) #创建画布
canvas[mask] = img[mask] #赋值边缘
## 保存
res = np.hstack((img, cannyed2, canvas)) #组合在一起
cv2.imwrite("result.png", res) #保存
## 显示
cv2.imshow("canny in opencv", res)#保持10s, 等待按键响应(超时或按键则进行下一步)
key = 0xFF & cv2.waitKey(1000*10)if key in (ord('Q'), ord('q'), 27):## 这部分用作演示用
print("Exiting...")## 销毁窗口
cv2.destroyAllWindows()
