Fast Odometry and Scene Flow from RGB-D Cameras based on Geometric Clustering 论文笔记
Fast Odometry and Scene Flow from RGB-D Cameras based on Geometric Clustering 论文笔记
摘要
主要思想是对场景进行两次分割,将其划分为几何聚类,这些几何聚类又被归类为静态或移动元素。
系统总览

输入颜色-深度图像对
首先,每一帧对场景点的3D坐标执行k-means聚类算法,分割成N个几何聚类。每一个聚类被视为一个刚体,
每个聚类的速度用twist ξi ∈ se(3) 来表示,里程计ξR ∈ se(3)的初始估计通过在稳健的M-估计器内最小化光度和几何残差来计算。
随后,这个估计被用于第二次分割,将场景分割为静态部分(或背景)和移动物体
根据ξR对I-D图像进行了变换,并计算了每个聚类的平均残差。属于静态背景的聚类根据ξR移动的残差较低,
一旦分割是已知的,它可以用来将运动估计过程分解为两个独立的步骤。
- 首先,使用所有被标记为背景的集群来获得更精确的ξO,现在不包括非静态部分。
- 其次,对场景的其余部分估计分割刚体场景流,假设每个集群表现为刚体。最后,使用新的优化的里程计重新计算背景分割,并将其变换到下一帧,得到BT: Ω→[0,1]。由于移动的物体可能会移动不止一帧,静止的部分也一样,我们在下一个迭代中使用B.T()来获得随时间一致的分割。
几何聚类
参考[Motion Cooperation: Smooth piece-wise rigid scene flow from RGB-D images]基于观测点的3D坐标计算K-均值聚类。
首先,我们构建一个连通性图G = {Gij, i = 1,…, N, j = 1,…, N}表示哪些聚类在空间上是连续的(Gij = 1),
此外,我们对相邻的聚类进行了平滑处理,以避免沿其边界的剧烈运动过渡,但这种平滑主要影响场景流估计,而对我们算法的其他模块没有任何作用。
里程计
直接法通过最小化连续RGB-D图像对之间的光度ri和几何残差rz来计算位姿

xk表示图像中的每一个给定像素 这两个也是直接法求取位姿的经典公式。
几何误差也就是深度误差,用位姿变换之后的2d像素点的坐标读取深度图2中的深度值减去3D点坐标变换得到的Z值。
T(ξ)∈SE(3)是与位姿变换ξ相关的齐次变换。其变换函数为:
![]()
构建成优化问题来获得相机运动,并计算残差的柯西m估计:
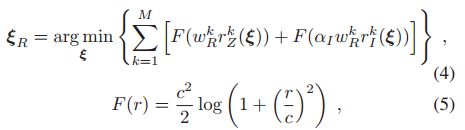
其中M是Z1中深度为非空的像素个数。参数αI对光度项和几何项进行加权。参数c标志着F的拐点,并且可以调整以使得估计对高残差或多或少的鲁棒性。
此外,应用预加权(wR)来帮助求解器收敛到真实的相机运动:
![]()
预加权主要是对两类点,一类是先验动态目标点,让其权重降低。另一类是远处点,提高其权重,因为更有可能是静态背景。
由于(4)是高度非线性的,运动在粗到细的方案中求解,线性化图像金字塔的每一级的残差,如[1],[3]中所做的那样。在每一层,(4)的解通过迭代重加权最小二乘得到。
背景分割
为了背景分割,使用里程计获得的ξR来检查哪些区域/集群遵循这种运动模式。这种评估不是按像素执行的,而是按聚类执行的,因为我们假设聚类中的所有像素都具有相同的刚体运动。
首先根据位姿ξR对RGB-D帧进行变换。
经过变换后,属于背景的集群将具有较低的光度和几何残差,而与移动物体相关的残差仍然很高。
理论上,这个标准应该足以将场景分割为静态和非静态部分,但在实践中,这个过程要复杂得多,因为残差并不总是一个很好的度量来评估精确的图像对齐。
为了解决这些问题,本文将背景分割分为两个步骤。
首先,我们计算每个聚类残差(δ)的稳健度量。
其次,我们制定了一个最小化问题,根据它们的平均残差,它们的几何形状和它们之前的分割BT (每个聚类的BT (x)通过均值来计算,这里的BT可以视为根据上一帧的结果对当前运动判断的一个先验值)来获得聚类b的分割。
稳健平均残差计算为:

其中Si是第i个聚类的大小,Oi是聚类中被遮挡的像素的数量(不包括δi的计算),Zi是聚类的平均深度。被遮挡像素被认为是几何残差低于某一阈值的像素,即像素x被遮挡的条件为:
![]()
接下来,我们制定了一个最小化问题,以获得背景分割。要最小化的能量函数由四项组成:
![]()
其中b是唯一未知的(与δ, bT和Z的依赖关系被清晰地显示出来)
当残差较低时,数据项ED将集群作为背景分割,反之亦然。为此,我们需要定义δ和b之间的映射,并指定低残差和高残差的阈值(分别为δL和δH)。为了简单起见,我们使用以下分段线性函数:
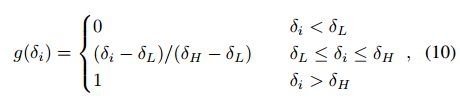
数据项ED就可以表示为:

其中

当残差远离不确定区域(δL < δi < δH)时,函数wD(δi)增加了数据项的权重,使明显是背景的一部分或移动物体的聚类具有更强的强度。
正则化项ER试图迫使邻近的集群获得类似的分割,并定义为

我们选择最小化(13)中的二次项,因为它有助于平滑带有误导性残差的聚类的偶尔错误标记。我们还尝试最小化差异的绝对值(总变量),这允许连接的集群之间出现明显的不连续,但它没有提供更好的结果。
时间正则化(ET)也被施加,因为场景的静态和动态部分都很可能在时间中保持静止和移动(分别):

最后,我们包括一个额外的项,为所有远离相机的集群引入一个对背景的偏向(bi→0)。这模拟了这样一个事实,即在室内场景中,移动的物体往往在前景,而远处的观察可能会捕捉到环境的固定元素(墙壁、天花板、地板、家具等)。

场景流估计和里程计优化
一旦场景被分割,我们将运动估计分为两个独立的过程。所有作为背景分割的集群将被视为一个单一的刚性块,并用于重新估计里程。另一方面,独立计算移动簇ξi的刚体运动。已知ξi,计算集群i中每个点p(x)所关联的场景流s(x)为
![]()
由于b在[0,1]范围内是连续的,所以我们需要在该范围内创建一个分区来分离静态对象和移动对象。
我们没有在0.5处施加简单的二进制阈值,而是考虑以下三个区域:
-
如果bi < 1/3,簇i被认为是静态的,仅用于里程计估计。
-
如果bi > 2/3,则假设集群i是移动的,仅用于场景流估计。
-
如果1/3 < bi < 2/3,簇i的状态是不确定的,因此它被用于里程计和场景流估计
通过这种方式,没有被明确分割的集群贡献了里程估计(因为它们可能是背景),但我们也计算了它们自己的独立运动。
通过最小化下面的误差,得到运动聚类的刚性运动

最终的里程计ξO的计算方法类似于最小化背景像素的(17)。这些优化问题几乎与第五节中描述的问题相同;唯一的区别是预加权策略。一旦场景被分割,我们使用预权重来惩罚遮挡和不连续,在优化过程中倾向于平滑区域,以找到精确的解决方案:
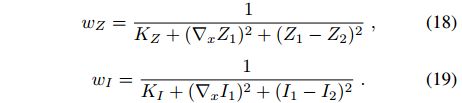
权重wZ和wI惩罚空间或时间梯度高的像素。虽然我们在论文中没有提供明确的比较,但这种预加权策略比没有预加权的纯鲁棒最小化提供了更好的结果,并且还有助于IRLS求解器在更少的迭代中收敛。
实现细节
柯西m估计器的参数设置
另一个重要方面是分割阶段δL和δH参数的选择。为了获得它们,我们计算了与聚类相关的稳健残差(δ)的中位数。由于移动物体群的残差通常会大大高于δ,所以我们将这个值设置为阈值。我们还观察到,平均残差随着相机的运动而增长,因此,我们还使δL和δH依赖于相机运动的范数:

其余部分的参数设置如下:
- αI设置为0.15,使光度和几何残差贡献相等。
- 遮挡阈值(ΔZocc)设置为0.2米,背景分割中几何先验的ZMin设置为场景的平均深度除以4。
- 在分割阶段,将不同项的权重设置为λR = 0.5, λT = 1.5, λZ = 0.15。
- (18)和(19)中的预权重常数设置为KI = 0.1, KZ = 10−4。