强化学习笔记
本文(不断更新)是学习以下课程/文献的笔记:
- 课程:UCL Cource on RL http://www0.cs.ucl.ac.uk/staff/D.Silver/web/Teaching.html
- 课程:Berkeley cs188 http://inst.eecs.berkeley.edu/~cs188/fa18/
- 书籍:Reinforcement learning: An Introduction https://web.stanford.edu/class/psych209/Readings/SuttonBartoIPRLBook2ndEd.pdf
1. 强化学习是什么
强化学习是机器学习的一种,它要解决的是“在某种状态下,应该做什么”的时序决策(sequential decision making)问题。
强化学习和监督学习的差别在于:监督学习需要利用标注数据集进行训练,训练出一个模型后在进行判断;强化学习也要训练,但不需要标注数据集,而是通过不断“尝试-试错”的模式进行学习。
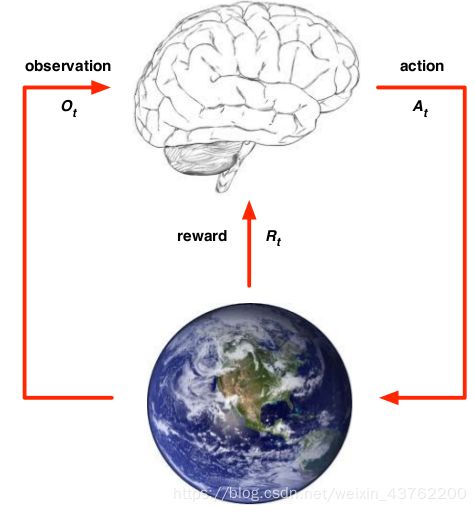
对于一个智能体(agent)来说,它要在环境(environment)中达到某种目标。为了达到目标,它会观察到环境中的某些信息,然后做出某项动作(action),这个动作会作用到环境中,然后环境会给智能体一个激励/奖赏(reward):智能体做出正确的动作则有正奖赏,反之则是负奖赏(即惩罚)。智能体就是在这种奖赏机制下学到正确的动作,即为强化学习。
强化学习的几个要素
- 状态(state)
状态可以理解为关于agent和环境的信息,比如某个地点、agent所处的位置、agent自身的速度等。状态是需要agent去获取的。因为强化学习是一个时序决策的问题,即存在 S 0 S_0 S0, S 1 S_1 S1,… S t S_t St, S t + 1 S_{t+1} St+1个状态,如果”下一个状态只与当前状态有关,而与更早之前的状态无关”, 即条件概率满足:
P ( S t + 1 ∣ S t ) = P ( S t + 1 ∣ S t , S t − 1 , . . . , S 0 ) P(S_{t+1}|S_t)=P(S_{t+1}|S_t,S_{t-1},...,S_0) P(St+1∣St)=P(St+1∣St,St−1,...,S0)
那么我们说该问题具有马尔科夫性,我们的强化学习问题也变成马尔科夫决策问题(MDP). - 动作(action)
即agent的动作 - 策略(policy)
策略就是状态到动作的映射:处在某一状态下应该做什么动作 - 目标(goal)
在一个问题中agent要达到的目标,比如是从迷宫中达到出口。目标可以用激励来量化表示 - 激励(reward)
这是环境给agent的反馈,agent的终极目标就是要把累积的reward最大化. 需要注意的是,当下行为会得到一个即时的reward,但其真正的价值,可能要等到一定时间后才体现,正所谓“不是不报,时候未到” - 值函数(value function)
激励表示对动作的即时奖惩,而值函数表示某个策略的终极价值
2. Markov Decision Process (MDP)
强化学习往往可以由马尔科夫决策过程(MDP)来描述。MDP是一个时序问题,在每个时刻 t t t它都被这样一个元组 ⟨ S , A , P , R , γ ⟩ \langle S, A, P, R, \gamma \rangle ⟨S,A,P,R,γ⟩所定义, 其中:
- S S S 为有限的state组成的状态空间
- A A A 为有限的action组成的动作空间
- P P P 是状态转移概率矩阵,即在状态 s s s时,采取 a a a动作,状态转移到 s ′ s^{\prime} s′的概率:
P s , s ′ a = P [ S t + 1 = s ′ ∣ S t = s , A = a ] P_{s,s^{\prime}}^a = P[S_{t+1} = s^{\prime} | S_{t} = s, A = a] Ps,s′a=P[St+1=s′∣St=s,A=a]
为什么从一个状态到另一个状态是概率性的呢?例如一个机器人在A点( s s s)决定采取动作"跳"转移到B点( s ′ s^{\prime} s′),但由于控制的bug等原因,它有可能只有90%的可能性成功到达B点,而有10%的可能性停留在A点。 - R R R 是激励函数,即在状态 s s s时,采取 a a a动作,能够得到的期望奖励(任何实数):
R s a = E [ R t + 1 ∣ S t = s , A = a ] R_{s}^a = \mathbb{E}[R_{t+1} | S_t = s, A = a] Rsa=E[Rt+1∣St=s,A=a]
这个奖励跟 t + 1 t+1 t+1时刻的状态没关系,比如上面说的机器人,只要它在A点采取“跳”这个动作了,那么就会有一个奖励。 - γ \gamma γ 是discount factor,这个是用来表述总回报(returns) G t G_t Gt的:
G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + . . . = ∑ k = 0 ∞ γ k R t + k + 1 , ( γ ∈ [ 0 , 1 ] ) G_t = R_{t+1} + \gamma R_{t+2} +\gamma^2 R_{t+3} + ... = \sum_{k=0}^\infty \gamma^k R_{t+k+1}, (\gamma \in [0, 1]) Gt=Rt+1+γRt+2+γ2Rt+3+...=k=0∑∞γkRt+k+1,(γ∈[0,1])
从 t t t时刻开始,之后的每个 t + k + 1 t+k+1 t+k+1时刻会有激励 R t + k + 1 R_{t+k+1} Rt+k+1,但是总的回报不是所有 R t + k + 1 R_{t+k+1} Rt+k+1的直接加和,而是会把离 t t t越远的的激励discount掉越多、再加和,这么做有两个理由:一是,这比较符合生物智能的特点——一般生物都是考虑眼前好处,而缺乏长远目光;二是数学上有助于后面我们求解收敛,因为:
G t = R t + 1 + γ R t + 2 + γ 2 R t + 3 + . . . ≤ R m a x ∑ k = 0 ∞ γ k = R m a x 1 − γ \begin{aligned} G_t &= R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} +...\\ &\leq R_{max}\sum_{k=0}^{\infty}\gamma^k \\ &=\frac{R_{max}}{1-\gamma} \end{aligned} Gt=Rt+1+γRt+2+γ2Rt+3+...≤Rmaxk=0∑∞γk=1−γRmax
只要 γ \gamma γ 小于1,回报 G t G_t Gt,是收敛的,即使时间无限长。
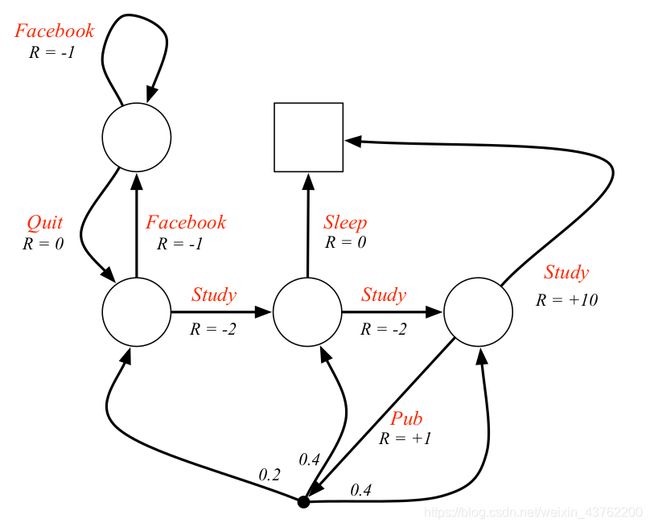
下图是一个MDP的例子:每个圆圈或者正方形表示一个状态;每个红色字体表示一个动作,每个箭头表示采取该动作将使状态转移;每个R表示激励
在MDP中,智能体从一个状态转移到另一个状态,上面说了可以由转移概率分布来描述,而实际上这种转移由具体动作来实现。在某个状态时采取某种行动,我们称之为策略(policy),记为 π \pi π:
π ( a ∣ s ) = P r o b [ A t = a ∣ S t = s ] \pi(a|s) = Prob[A_t = a|S_t = s] π(a∣s)=Prob[At=a∣St=s]
π \pi π是一个概率分布,就是说某个状态下有可能采取不同的动作。考虑下面这个状态转移例子:空心圆圈表示状态,实心黑点表示动作。从最上面的状态 s s s出发,我们有一定的概率分布 π \pi π可以采取3种不同的动作 a a a. 而采取某一个动作后,我们即会获得激励 r r r, 并且有一定转移概率 p p p会使状态转移到下一个 s ′ s^{\prime} s′. 本例子中最下层空心圆圈表示,某个动作后都有两种新的状态的可能性。

2.1 状态值函数(state value function)
好了,现在在MDP中,状态之间可以通过策略函数 π \pi π和转移函数 P P P函数联系起来。并且,在某一个状态采取某一动作时,智能体会得到一个激励(不管是正的还是负的)。我们说强化学习的终极目标是获得最大化的累积的激励,而不是当下的激励;有可能这一步走出去捡到个宝,获得不错的即时激励,可是却走向了错误的方向,导致长期的累积激励不高。
为了衡量在某个状态时的长期累积激励,我们定义状态值函数 V π ( s ) V_{\pi}(s) Vπ(s)为在策略概率分布和转移概率分布下的长期回报:
V π ( s ) = E π [ G t ∣ S t = s ] = E π [ R t + 1 + γ R t + 2 + γ 2 R t + 3 . . . ∣ S t = s ] \begin{aligned} V_{\pi}(s) &= \mathbb{E}_{\pi}[G_t|S_t = s]\\ &= \mathbb{E}_{\pi}[R_{t+1} + \gamma R_{t+2} +\gamma^2R_{t+3}...|S_t = s]\\ \end{aligned} Vπ(s)=Eπ[Gt∣St=s]=Eπ[Rt+1+γRt+2+γ2Rt+3...∣St=s]
发现 V π ( s ) V_{\pi}(s) Vπ(s)具有递归关系:
V π ( s ) = E π [ R t + 1 + γ ( R t + 2 + γ R t + 3 . . . ) ∣ S t = s ] = E π [ R t + 1 + γ V π ( S t + 1 ) ∣ S t = s ] = E π [ R t + 1 ∣ S t = s ] + E π [ γ V π ( S t + 1 ) ∣ S t = s ] = ∑ a ∈ A π ( a ∣ s ) R ( s , a ) + ∑ a ∈ A π ( a ∣ s ) γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) = ∑ a ∈ A π ( a ∣ s ) ( R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) ) = R π + γ P π V π ( S t + 1 ) \begin{aligned} V_{\pi}(s) &= \mathbb{E}_{\pi}[R_{t+1} + \gamma (R_{t+2} +\gamma R_{t+3}...)|S_t = s]\\ &=\mathbb{E}_{\pi}[R_{t+1}+\gamma V_{\pi}(S_{t+1})|S_t = s] \\ &= \mathbb{E}_{\pi}[R_{t+1}|S_t = s]+E_{\pi}[\gamma V_{\pi}(S_{t+1})|S_t = s]\\ &= \sum_{a\in A}\pi(a|s)R(s,a) + \sum_{a \in A} \pi(a|s) \gamma \sum_{s^{\prime}\in S}P(s^{\prime}|s,a)V_{\pi}(s^{\prime})\\ &= \sum_{a\in A}\pi(a|s)(R(s,a)+\gamma \sum_{s^{\prime}\in S}P(s^{\prime}|s,a)V_{\pi}(s^{\prime})) \\ &= R^{\pi} + \gamma P^{\pi} V_{\pi} (S_{t+1}) \end{aligned} Vπ(s)=Eπ[Rt+1+γ(Rt+2+γRt+3...)∣St=s]=Eπ[Rt+1+γVπ(St+1)∣St=s]=Eπ[Rt+1∣St=s]+Eπ[γVπ(St+1)∣St=s]=a∈A∑π(a∣s)R(s,a)+a∈A∑π(a∣s)γs′∈S∑P(s′∣s,a)Vπ(s′)=a∈A∑π(a∣s)(R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′))=Rπ+γPπVπ(St+1)
可见, s s s状态下的回报,可以从转移到的下一个状态的 S t + 1 S_{t+1} St+1计算/更新而来。这点对于后面的迭代求最优解很重要。
2.2 动作值函数(action value function / Q-value)
和状态值函数类似,我们还可以定义动作值函数:衡量某一状态下采取某个动作的长期累积回报:
q π ( s , a ) = E π [ R t + 1 + γ R t + 2 + γ 2 R t + 3 . . . ∣ S t = s , A t = a ] = E π [ R t + 1 + γ q π ( S t + 1 ) ∣ S t = s , A t = a ] = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) \begin{aligned} q_{\pi}(s,a) &= \mathbb{E}_{\pi}[R_{t+1} + \gamma R_{t+2} +\gamma^2R_{t+3}...|S_t = s, A_t = a]\\ &= \mathbb{E}_{\pi}[R_{t+1}+\gamma q_{\pi}(S_{t+1})|S_t = s, A_t = a] \\ &= R(s,a)+\gamma \sum_{s^{\prime}\in S}P(s^{\prime}|s,a)V_{\pi}(s^{\prime}) \\ \end{aligned} qπ(s,a)=Eπ[Rt+1+γRt+2+γ2Rt+3...∣St=s,At=a]=Eπ[Rt+1+γqπ(St+1)∣St=s,At=a]=R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)
以上状态值函数和动作值函数都具有递归性质,两者都统称为贝尔曼方程(Bellman equation).可以看到,状态值函数和动作值函数的关系为:
V π ( s ) = ∑ a ∈ A π ( a ∣ s ) q π ( s , a ) V_{\pi}(s) = \sum_{a\in A}\pi(a|s) q_{\pi}(s,a) Vπ(s)=a∈A∑π(a∣s)qπ(s,a)
2.3 最优的值函数(optimal value function)
强化学习是为了达到某种目标,比如机器人找到迷宫出口。“目标”我们可以用激励来量化体现,比如当机器人在迷宫出口位置时激励远远大于在其它位置上的。而出口位置往往不是一蹴而就的,而是要经过一段时间的“动作-状态转移”过程才能到达的。于是,我们的问题就变成最优(大)化累积激励,也就是最优化值函数:包括状态值函数和动作值函数。
最优状态值函数 V ⋆ ( s ) V_{\star}(s) V⋆(s):
V ⋆ ( s ) = m a x π V π ( s ) V_{\star}(s) = \underset{\pi}{max} \ V_{\pi}(s) V⋆(s)=πmax Vπ(s)
最优动作值函数 q ⋆ ( s ) q_{\star}(s) q⋆(s):
q ⋆ ( s , a ) = m a x π q π ( s , a ) q_{\star}(s,a) = \underset{\pi}{max} \ q_{\pi}(s,a) q⋆(s,a)=πmax qπ(s,a)
得到最优值函数也就意味了找到了最优策略(optimal policy) π ⋆ \pi_{\star} π⋆:
π ⋆ = a r g m a x π V π ( s ) = a r g m a x π q π ( s , a ) \pi_{\star} = \underset{\pi} {argmax} \ V_{\pi}(s) = \underset{\pi} {argmax} \ q_{\pi}(s,a) π⋆=πargmax Vπ(s)=πargmax qπ(s,a)
那么如何找到最优值函数呢?
2.4 MDP类型
求最优解之前,先明确一下MDP的两种形式:
-
model-based
即关于环境的所有信息都是已知的,即对于智能体来说,MDP的模型 ⟨ S , A , P , R , γ ⟩ \langle S,A,P,R,\gamma \rangle ⟨S,A,P,R,γ⟩是已知的,智能体要做的事情叫做规划(planning). -
model-free
即MDP的模型是不完全清楚的,比如状态转移概率未知等。这时智能体要做的就是学习(learning),强化学习的算法也主要是这一块。
不管是planning还是learning,都有两种问题:
- 预测(prediction)
给智能体一个的策略 π \pi π. 计算出值函数 V π V_{\pi} Vπ. - 控制(control)
控制的意思其实就是优化。这时智能体没有明确的策略,而是要在所有策略分布中找出最优的值函数 V ⋆ V_{\star} V⋆和最优策略 π ⋆ \pi_{\star} π⋆.
根据MDP是model-based或model-free、问题是planning还是learning,强化学习算法有如下分类:
| model-based | model-free | |
|---|---|---|
| prediction | policy evalution | Monte-Carlo; TD |
| control | policy iteration; value iteration |
Q-learning Sarsa |
3. 策略迭代(policy iteration)和值迭代(value iteration)
这一部分是关于求解model-based的MDP问题的策略迭代和值迭代算法。策略迭代和值迭代都是为了求MDP的最优策略:每一状态对应的最优动作,两者是等价的。只不过策略迭代算完就完了,最优策略也就有了;而值迭代算完之后还需要进行一步最优策略的提取,当然这很简单,就是根据状态值函数求动作值函数而已。
在说求最优策略之前,先说怎么评估一个策略的优劣。一个策略越好,状态值函数越大。
3.1 策略评估(policy evaluation)
给定一个策略 π \pi π,求状态值函数,根据状态函数的贝尔曼方程,我们有:
V π ( s ) = E π [ R t + 1 + γ q π ( S t + 1 ) ∣ S t = s , A t = a ] = ∑ a π ( a ∣ s ) ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V π ( s ′ ) ] \begin{aligned} V_{\pi}(s) &= \mathbb{E}_{\pi}[R_{t+1}+\gamma q_{\pi}(S_{t+1})|S_t = s, A_t = a] \\ &= \sum_a\pi(a|s) \sum_{s^{\prime}, r}p(s^{\prime},r|s,a) [r + \gamma V_{\pi}(s^{\prime})]\\ \end{aligned} Vπ(s)=Eπ[Rt+1+γqπ(St+1)∣St=s,At=a]=a∑π(a∣s)s′,r∑p(s′,r∣s,a)[r+γVπ(s′)]
这里 p p p是转移概率函数,需要注意的是这里激励 r r r和下一个状态 s ′ s^{\prime} s′联系在一起,所以条件概率函数放在了中括号 [ ] [ \ ] [ ]外面。
我们有 ∣ S ∣ |S| ∣S∣个状态,因此可以写出含有 ∣ S ∣ |S| ∣S∣个未知数的线性方程组,然后直接解方程组得到所有 V π ( s ) V_{\pi}(s) Vπ(s). 这不失为一种简单的方法,但是计算消耗较大。另一种方法就是迭代法,即初始时随便给 V 0 ( s ) V_0(s) V0(s)一个值,然后在每个迭代步 k k k, 根据贝尔曼方程迭代:
V k + 1 ( s ) ← ∑ a π ( a ∣ s ) ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V k ( s ′ ) ] \begin{aligned} V_{k+1}(s) \leftarrow \sum_a\pi(a|s) \sum_{s^{\prime},r}p(s^{\prime},r|s,a) [r + \gamma V_{k}(s^{\prime})]\\ \end{aligned} Vk+1(s)←a∑π(a∣s)s′,r∑p(s′,r∣s,a)[r+γVk(s′)]
第 k + 1 k+1 k+1步状态 s s s,由上一步 k k k的、 s s s的下一个状态 s ′ s^{\prime} s′计算得来。可以证明,当 k → ∞ k\rightarrow \infty k→∞时 V k + 1 ( s ) V_{k+1}(s) Vk+1(s)趋于 V π ( s ) V_{\pi}(s) Vπ(s). 循环迭代的终止条件是 V k + 1 ( s ) V_{k+1}(s) Vk+1(s) 和 V k ( s ) V_{k}(s) Vk(s)的差别小于某个设定的误差阈值。
3.2 策略改善(policy improvement)
既然我们能够评估一个策略,计算出策略对应的状态值函数,那么一个直接的想法就是怎么对策略进行改善。把原有策略 π \pi π改善成 π ′ \pi^{\prime} π′的方法是找到令状态值函数最大的那个动作:
π ′ = a r g m a x a V π ( s , a ) = a r g m a x a ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V k ( s ′ ) ] \begin{aligned} \pi^{\prime} &= \underset{a}{argmax} \ V_{\pi}(s,a)\\ &= \underset{a}{argmax} \sum_{s^{\prime},r}p(s^{\prime},r|s,a) \lbrack r + \gamma V_{k}(s^{\prime})]\\ \end{aligned} π′=aargmax Vπ(s,a)=aargmaxs′,r∑p(s′,r∣s,a)[r+γVk(s′)]
3.3 策略迭代
有了上面的策略评估和策略改善,就可以很自然地进行策略迭代:先随便给个策略,计算状态值函数(策略评估);然后根据状态值函数更新/改善策略(策略改善);再由改善了的策略进行新的策略评估;接着又是策略改善…如此循环,直到这一步更新得到的策略已经和上一步的一样为止。

3.4 值迭代
策略迭代是不断地进行 “评估(值函数计算)- 改善(更新策略)”,而值迭代则是只进行值函数更新,直到值函数已经是最大化的时候,才一次性地提取出最优策略出来。值函数的更新还是贝尔曼方程,只不过这里不是取期望的状态值函数,而是取最大值的:
V k + 1 ( s ) ← m a x a ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V k ( s ′ ) ] \begin{aligned} V_{k+1}(s) \leftarrow \underset{a}{max} \sum_{s^{\prime},r}p(s^{\prime},r|s,a) [r + \gamma V_{k}(s^{\prime})]\\ \end{aligned} Vk+1(s)←amaxs′,r∑p(s′,r∣s,a)[r+γVk(s′)]
3.5 一个例子
(代码)
4. model-free prediction: MC & TD
4.1 MC
在model-based的MDP问题里,由一个策略计算状态值函数可以通过贝尔曼方程:
V π ( s ) = E π [ G t ∣ S t = s ] = ∑ a ∈ A π ( a ∣ s ) ( R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) ) \begin{aligned} V_{\pi}(s) &= \mathbb{E}_{\pi}[G_t|S_t = s]\\ &= \sum_{a\in A}\pi(a|s)(R(s,a)+\gamma \sum_{s^{\prime}\in S}P(s^{\prime}|s,a)V_{\pi}(s^{\prime})) \\ \end{aligned} Vπ(s)=Eπ[Gt∣St=s]=a∈A∑π(a∣s)(R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′))
但在model-free的MDP里转移概率是未知的。我们可以先进行一系列实验通过统计来估计一个转移概率分布,这有点像机器学习。但这里我们通过另一种方法:蒙特卡洛(MC)来直接近似地求值函数。
MC想法很简单,就是不断地重复实验(episodes),只要在实验中状态 s s s被访问到了,就记录该次实验 s s s的回报,最后用所有回报的平均值当作状态 s s s的状态值。也就是说,我们不再计算状态 s s s的期望回报(因为不知道概率分布),而是计算所有实验样本的平均回报:
V π ( s ) = lim N ( s ) → ∞ S ( s ) N ( s ) where episode number N ( s ) ← N ( s ) + 1 total return S ( s ) ← S ( s ) + 1 \begin{aligned} &V_{\pi}(s) = \lim\limits_{N(s)\rightarrow \infty} \frac{S(s)}{N(s)} \\ \text{where } &\text{episode number } N(s) \leftarrow N(s)+1\\ &\text{total return } S(s) \leftarrow S(s)+1 \end{aligned} where Vπ(s)=N(s)→∞limN(s)S(s)episode number N(s)←N(s)+1total return S(s)←S(s)+1
上面这种计算方法是得到了所有回报之后再求平均值,事实上还有一种动态的方法。考虑计算 { x j } \{ x_j \} {xj}的平均值 μ k \mu_k μk:
μ k = 1 k ∑ j = 1 k x j = 1 k ( x k + ∑ j = 1 k − 1 x j ) = 1 k ( x k + ( k − 1 ) μ k − 1 ) = μ k − 1 + 1 k ( x k − μ k − 1 ) \begin{aligned} \mu_k &= \frac{1}{k} \sum_{j=1}^k x_j \\ &= \frac{1}{k} (x_k + \sum_{j=1}^{k-1} x_j)\\ &= \frac{1}{k} (x_k + (k-1)\mu_{k-1})\\ &= \mu_{k-1} + \frac{1}{k}(x_k - \mu_{k-1}) \end{aligned} μk=k1j=1∑kxj=k1(xk+j=1∑k−1xj)=k1(xk+(k−1)μk−1)=μk−1+k1(xk−μk−1)
若状态 S t S_t St的回报是 G t G_t Gt,则 V ( S t ) V(S_t) V(St)可以通过下式的更新逼近平均值:
N ( S t ) ← N ( S t ) + 1 V ( S t ) ← V ( S t ) + 1 N ( S t ) ( G t − V ( S t ) ) \begin{aligned} N(S_t) &\leftarrow N(S_t)+1\\ V(S_t) &\leftarrow V(S_t) + \frac{1}{N(S_t)}(G_t-V(S_t)) \end{aligned} N(St)V(St)←N(St)+1←V(St)+N(St)1(Gt−V(St))
利用这种方法迭代,每一次实验更新一次,就可以把更早之前的那些状态值都抛弃掉了。
这里我们可以把 1 N ( S t ) \frac{1}{N(S_t)} N(St)1用 α \alpha α替代:
V ( S t ) ← V ( S t ) + α ( G t − V ( S t ) ) \begin{aligned} V(S_t) &\leftarrow V(S_t) + \alpha(G_t-V(S_t)) \end{aligned} V(St)←V(St)+α(Gt−V(St))
α \alpha α表示值更新的步长。迭代开始前可以给 V ( S t ) V(S_t) V(St)一个随机值,每一步迭代,就是把 G t G_t Gt看作目标值(target),目标值和实际值的误差是 ( G t − V ( S t ) ) (G_t-V(S_t)) (Gt−V(St)),那么我们就是以这个误差来更新实际值。这种方法叫增量迭代方法(incremental method)
4.2 Temporal-Difference (时间差分,TD)
在MC的方法中,我们更新一个状态值函数,是要等到一次实验完全完成了之后、有了回报 G t G_t Gt才能计算。与此相对应的TD算法,则是不需要等到实验全部完成,而是从 V ( S t ) V(S_t) V(St)走一步到 V ( S t + 1 ) V(S_{t+1}) V(St+1)、得到一个激励 R t + 1 R_{t+1} Rt+1,就马上进行更新:
V ( S t ) ← V ( S t ) + α ( R t + 1 + γ V ( S t + 1 ) − V ( S t ) ) \begin{aligned} V(S_t) &\leftarrow V(S_t) + \alpha(R_{t+1}+\gamma V(S_{t+1})-V(S_t)) \end{aligned} V(St)←V(St)+α(Rt+1+γV(St+1)−V(St))
这里 R t + 1 + γ V ( S t + 1 ) R_{t+1}+\gamma V(S_{t+1}) Rt+1+γV(St+1)叫估计回报(estimated return)。注意这里 V ( S t + 1 ) V(S_{t+1}) V(St+1)是上一次实验更新得到的、下一个状态的值函数,所以 R t + 1 + γ V ( S t + 1 ) ≠ G t R_{t+1}+\gamma V(S_{t+1}) \ne G_t Rt+1+γV(St+1)̸=Gt.
这里可以另外定义一个量,叫TD-error δ t = R t + 1 + γ V ( S t + 1 ) − V ( S t ) \delta_t = R_{t+1}+\gamma V(S_{t+1})-V(S_t) δt=Rt+1+γV(St+1)−V(St).
这种不等到整个实验结束就利用下一步的值来更新当前步的值方法,叫bootstrapping方法。DP和TD都是bootstrapping方法。
| Sampling? | Bootstrapping? | |
|---|---|---|
| DP | No | Yes |
| MC | Yes | No |
| TD | Yes | Yes |
4.3 n-step TD, TD( λ \lambda λ)
上面TD的值更新方法,是从 V ( S t ) V(S_t) V(St)往后看一步,到 V ( S t + 1 ) V(S_{t+1}) V(St+1). 那么是不是可以往后多看几步,用后面几步的估计回报来更新 V ( S t ) V(S_t) V(St)呢?假设我们多往后看 n n n步,第 n n n步的回报叫 G t ( n ) G_t^{(n)} Gt(n):
G t ( n ) = R t + 1 + γ R t + 2 + . . . + γ n V ( S t + n ) G_t^{(n)} = R_{t+1}+\gamma R_{t+2} +...+\gamma^n V(S_{t+n}) Gt(n)=Rt+1+γRt+2+...+γnV(St+n)
n-step TD更新方法:
V ( S t ) ← V ( S t ) + α ( G t ( n ) − V ( S t ) ) \begin{aligned} V(S_t) &\leftarrow V(S_t) + \alpha(G_t^{(n)}-V(S_t)) \end{aligned} V(St)←V(St)+α(Gt(n)−V(St))
当 n = 1 n=1 n=1时, G t ( n ) G_t^{(n)} Gt(n)就是上面讲过的TD的估计回报 R t + 1 + γ V ( S t + 1 ) R_{t+1}+\gamma V(S_{t+1}) Rt+1+γV(St+1);当 n = ∞ n=\infty n=∞时,则 G t ( n ) = G t G_t^{(n)} = G_t Gt(n)=Gt,TD和MC就是一样的了!
那么 n n n应该取几?是往后看5步好还是10步好?其实我们可以把所有的 G t ( n ) G_t^{(n)} Gt(n)利用权重加和起来,这样就可以利用每一步的信息了。把综合了所有步数的回报叫 λ \lambda λ-return G t λ G_t^{\lambda} Gtλ ( λ ∈ [ 0 , 1 ] \lambda \in [0,1] λ∈[0,1]):
G t λ = ( 1 − λ ) G t ( 1 ) + ( 1 − λ ) λ G t ( 2 ) + . . . + ( 1 − λ ) λ n − 1 G t ( n ) = ( 1 − λ ) ∑ n = 1 ∞ λ n − 1 G t ( n ) \begin{aligned} G_t^{\lambda} &= (1-\lambda ) G_t^{(1)} + (1-\lambda ) \lambda G_t^{(2)} +...+(1-\lambda ) \lambda^{n-1} G_t^{(n)}\\ &= (1-\lambda )\sum_{n=1}^{\infty}\lambda^{n-1} G_t^{(n)} \end{aligned} Gtλ=(1−λ)Gt(1)+(1−λ)λGt(2)+...+(1−λ)λn−1Gt(n)=(1−λ)n=1∑∞λn−1Gt(n)
( 1 − λ ) λ n − 1 (1-\lambda ) \lambda^{n-1} (1−λ)λn−1是权重。为什么选择这样的权重呢?首先这种权重满足和为1的条件,其次是因为这样的直觉:离当前越远的状态,对现在的影响越小,所以 λ \lambda λ的幂次数越大。
此时TD更新方法就是:
V ( S t ) ← V ( S t ) + α ( G t λ − V ( S t ) ) or V ( S t ) ← V ( S t ) + α ( ( 1 − λ ) ∑ n = 1 ∞ λ n − 1 G t ( n ) − V ( S t ) ) \begin{aligned} V(S_t) &\leftarrow V(S_t) + \alpha(G_t^{\lambda}-V(S_t))\\ \text{or } V(S_t) &\leftarrow V(S_t) + \alpha((1-\lambda )\sum_{n=1}^{\infty}\lambda^{n-1} G_t^{(n)}-V(S_t))\\ \end{aligned} V(St)or V(St)←V(St)+α(Gtλ−V(St))←V(St)+α((1−λ)n=1∑∞λn−1Gt(n)−V(St))
这就叫TD( λ \lambda λ)。这里我们要综合考虑未来的n步,来更新当下的状态,这样的方式叫做Forward-View TD( λ \lambda λ). 往未来看n步、等到n步都走完了再更新当前状态值。但这有问题,就是每次更新状态值,要等到n步都走完了才能进行,这就缺乏了TD那种走一步、更新一步的online性质了。
为此,我们使用另一种更新状态的方式,叫Backward-View TD( λ \lambda λ), 想法与Forward-View相反:不再往未来看,而是每走一步,忘过去看;每走一步就更新过去的n步。计算方法是:
V ( s ) ← V ( s ) + α δ t E t ( s ) where δ t = R t + 1 + γ V ( S t + 1 ) − V ( S t ) E t ( s ) = γ λ E t − 1 ( s ) + 1 ( S t = s ) with E 0 ( s ) = 0 \begin{aligned} &V(s) \leftarrow V(s) + \alpha \delta_t E_t(s) \\ \text{where } &\delta_t = R_{t+1}+\gamma V(S_{t+1})-V(S_t)\\ &E_t(s) = \gamma \lambda E_{t-1}(s) + \mathbb{1}(S_t=s) \text{ with } E_0(s) = 0 \end{aligned} where V(s)←V(s)+αδtEt(s)δt=Rt+1+γV(St+1)−V(St)Et(s)=γλEt−1(s)+1(St=s) with E0(s)=0
E t ( s ) E_t(s) Et(s)叫做Eligibility Trace.
4.4 MC和TD的比较
回过头看,model-free的n-step TD( λ \lambda λ)增量式值函数更新方法:
V ( S t ) ← V ( S t ) + α ( ( 1 − λ ) ∑ n = 1 ∞ λ n − 1 G t ( n ) − V ( S t ) ) \begin{aligned} V(S_t) &\leftarrow V(S_t) + \alpha((1-\lambda )\sum_{n=1}^{\infty}\lambda^{n-1} G_t^{(n)}-V(S_t)) \end{aligned} V(St)←V(St)+α((1−λ)n=1∑∞λn−1Gt(n)−V(St))
统一了MC和TD, 或者说这两者是n-step TD( λ = 0 \lambda=0 λ=0)的两种极端情况:
- n = 1 → n=1 \rightarrow n=1→ TD
- n = ∞ → n=\infty \rightarrow n=∞→ MC
虽说被统一了,但还是有必要看看这两种极端情况的区别,当选择 n n n的时候也知道会影响到什么。
MC要让一个episode完全进行完了再更新所有值函数,值函数是朝着实际目标 G t G_t Gt的方向去更新的;TD则不需要一个完整的episode,每走一步就更新一次,值函数更新方向是估计回报 R t + 1 + γ V ( S t + 1 ) R_{t+1}+\gamma V(S_{t+1}) Rt+1+γV(St+1).
G t G_t Gt是从值函数最原始定义:回报的数学期望而来的(虽然用采样平均值代替期望),所以它是对真实的值函数 V π ( s ) V_\pi(s) Vπ(s)的无偏估计(unbiased estimate). 而显然, R t + 1 + γ V ( S t + 1 ) R_{t+1}+\gamma V(S_{t+1}) Rt+1+γV(St+1)和 G t G_t Gt还相差了很多项,所以 R t + 1 + γ V ( S t + 1 ) R_{t+1}+\gamma V(S_{t+1}) Rt+1+γV(St+1)是对 V π ( s ) V_\pi(s) Vπ(s)的有偏估计(biased estimate).
而另一方面,MC方法中随机采集了几乎所有状态和动作样本,导致 G t G_t Gt的方差较大;相反, R t + 1 + γ V ( S t + 1 ) R_{t+1}+\gamma V(S_{t+1}) Rt+1+γV(St+1)方差较小。
在收敛性质上,MC是朝着最小化样本方差的方向收敛,也就是MC的结果更能吻合episodes的数据样本,倾向于类似监督学习里的“过拟合”,而和MDP这种模型的马尔科夫性关联性较小。相反,TD的收敛方向是最大化马尔科夫似然性,更加符合MDP模型。
| 偏差 | 方差 | 收敛 | |
|---|---|---|---|
| MC | 0 | 大 | 最小化方差 |
| TD | 大 | 小 | 最大化马尔科夫似然性 |
5 model-free control
因为是control / learning 问题,也就是找出最优策略问题,我们回到第3部分的策略迭代方法;因为这是model-free,我们要用到第4部分的MC或TD.
因为TD相对于MC有方差小、在线更新值函数、吻合马尔科夫性的优点,我们这里选择TD作为策略评估和策略改进的基本方法。
Model-free control有两种基本的类型:
- 同策略(on-policy)学习: 就是从已知的 π \pi π中,通过采样实验的方法来学习策略 π \pi π,代表方法是以TD为基础的Sarsa算法
- 异策略(off-policy)学习: 就是看着别人的策略 μ \mu μ, 通过采样实验的方法来学习策略 π \pi π,代表方法是以TD为基础的Q-learning算法
5.1 Q值函数
值函数有两种:状态值函数 V ( s ) V(s) V(s)和动作值函数 Q ( s , a ) Q(s,a) Q(s,a),也叫Q值函数. 在第3部分model-based中,我们用 V ( s ) V(s) V(s)来进行策略评估和策略改进,可是在model-free时却不能再用它,因为我们不知道MDP的状态转移函数 p p p,而基于 V ( s ) V(s) V(s)的策略改进却需要:
π ′ = a r g m a x a ∑ s ′ , r p ( s ′ , r ∣ s , a ) [ r + γ V k ( s ′ ) ] \begin{aligned} \pi^{\prime} &= \underset{a}{argmax} \sum_{s^{\prime},r}p(s^{\prime},r|s,a) \lbrack r + \gamma V_{k}(s^{\prime})]\\ \end{aligned} π′=aargmaxs′,r∑p(s′,r∣s,a)[r+γVk(s′)]
替代地,我们使用 Q ( s , a ) Q(s,a) Q(s,a):
(5-1) π ′ = a r g m a x a Q ( s , a ) \begin{aligned} \pi^{\prime} &= \underset{a}{argmax} \ Q(s,a) \tag{5-1}\\ \end{aligned} π′=aargmax Q(s,a)(5-1)
Q值函数的具体用法要看是采用同策略的Sarsa还是异策略的Q-learning算法。
5.2 ϵ \epsilon ϵ-greedy
在式子(5-1)策略改进中,我们每一步都是选择让Q值最优的策略,但这是不是一定是最终最优的策略呢?比如有两扇门A和B,第一次打开A,什么都没有;第二-五次都是打开B,都得到了10块钱。很显然到目前为止,根据最大化Q值的方法,接下来还要打开B。可是打开A真的会一直都没收获吗?有没有可能某次打开A换来1000块呢?要不要试一下?
理性告诉我们,大多数时候还是应该选择B的,但是可以以一定的几率 ϵ \epsilon ϵ去打开A试一下。已经比较确定打开B会有一定收益,这叫exploitation;而试一试打开A,碰碰运气,这叫 ϵ \epsilon ϵ-greedy exploration. 假设有 m m m次实验,那么我们的 ϵ \epsilon ϵ-greedy策略就应该是:
π ( a ∣ s ) = { ϵ / m + 1 − ϵ , if a = a r g m a x Q ( s , a ) ϵ / m , otherwise \pi(a|s) = \begin{cases} \epsilon / m + 1 - \epsilon, &\text{if } a = argmax \ Q(s,a) \\ \epsilon / m , &\text{otherwise} \end{cases} π(a∣s)={ϵ/m+1−ϵ,ϵ/m,if a=argmax Q(s,a)otherwise
事实上任何 ϵ \epsilon ϵ-greedy策略 π ′ \pi^{\prime} π′都是对原有策略 π \pi π的改进,证明如下:
V π ′ ( s ) = ∑ a π ′ ( a ∣ s ) q π ( a , s ) = ϵ / m ∑ a q π ( a , s ) ⎵ exploitation + ( 1 − ϵ ) m a x a q π ( a , s ) ⎵ exploration ≥ ϵ / m ∑ a q π ( a , s ) + ( 1 − ϵ ) ∑ a π ( a ∣ s ) − ϵ / m 1 − ϵ q π ( a , s ) ⎵ because max >= any weighted sum = ∑ a π ( a ∣ s ) q π ( a , s ) = V π ( s ) \begin{aligned} V_{\pi^{\prime}}(s) &= \sum_a \pi^{\prime}(a|s)q_{\pi}(a,s) \\ &= \underbrace{\epsilon / m \sum_a q_{\pi}(a,s)}_{\text{exploitation}} + \underbrace{(1 - \epsilon) \ \underset{a}{max} \ q_{\pi}(a,s)}_{\text{exploration}}\\ &\geq \epsilon / m \sum_a q_{\pi}(a,s) + \underbrace{(1 - \epsilon) \sum_a \frac{\pi(a|s)-\epsilon / m}{1 - \epsilon}q_{\pi}(a,s)}_{\text{because max >= any weighted sum}}\\ &= \sum_a \pi(a|s)q_{\pi}(a,s) \\ &= V_{\pi}(s) \end{aligned} Vπ′(s)=a∑π′(a∣s)qπ(a,s)=exploitation ϵ/ma∑qπ(a,s)+exploration (1−ϵ) amax qπ(a,s)≥ϵ/ma∑qπ(a,s)+because max >= any weighted sum (1−ϵ)a∑1−ϵπ(a∣s)−ϵ/mqπ(a,s)=a∑π(a∣s)qπ(a,s)=Vπ(s)
一般来说,在循环迭代的最初,我们设置 ϵ = 1 \epsilon=1 ϵ=1,意思是最开始的时候我们对于环境一无所知,唯一能做的就是exploration. 而随着迭代次数的增加, ϵ \epsilon ϵ 逐渐减小。每次迭代都是产生一个0和1之间的随机数,如果随机数比 ϵ \epsilon ϵ 大则采取exploitation, 反之则exploration. 当迭代至尾声时, ϵ \epsilon ϵ 应该接近0, 即此时我们对环境已有相当的了解,要做的就只是exploitation.
5.3 Sarsa
Sarsa = S - A - R - S’ - A’,模型如下图:

就是说从一个状态-动作对(S, A)出发,得到一个激励R,到达下一个状态S’, 然后根据策略再采取动作A‘, 如此循环下去。Sarsa 是一种on-policy的策略迭代方法,原理和model-based里的策略迭代一样,即策略评估和策略改进交替进行,直到收敛:
- 策略评估:其实就是TD了,只不过这里把TD里的状态值函数换成动作Q值函数,如(5.1)所说的。
(5-3) Q ( S , A ) ← Q ( S , A ) + α ( R + γ Q ( S ′ , A ′ ) − Q ( S , A ) ) \begin{aligned} Q(S,A) &\leftarrow Q(S,A) + \alpha(R+\gamma Q(S^{\prime},A^{\prime}) -Q(S,A) )\tag{5-3} \end{aligned} Q(S,A)←Q(S,A)+α(R+γQ(S′,A′)−Q(S,A))(5-3) - 策略改进: ϵ \epsilon ϵ-greedy策略改进
在TD里我们还用到了n-step和 λ \lambda λ参数,这里也是一样的道理,策略评估可以进一步拓展成Forward-View的形式:
Q ( S t , A t ) ← Q ( S t , A t ) + α ( q t λ − Q ( S t , A t ) ) where q t λ = ( 1 − λ ) ∑ n = 1 ∞ λ n − 1 q t ( n ) \begin{aligned} Q(S_t,A_t) &\leftarrow Q(S_t,A_t) + \alpha(q_t^{\lambda}-Q(S_t,A_t) )\\ \text{where } q_t^{\lambda}&= (1-\lambda )\sum_{n=1}^{\infty}\lambda^{n-1} q_t^{(n)} \end{aligned} Q(St,At)where qtλ←Q(St,At)+α(qtλ−Q(St,At))=(1−λ)n=1∑∞λn−1qt(n)
为了能online计算,和TD( λ \lambda λ)一样,我们用Eligibility Trace把上式改成Backward-View的形式:
Q ( s , a ) ← Q ( s , a ) + α δ t E t ( s , a ) where δ t = R t + 1 + γ Q ( S t + 1 , A t + 1 ) − Q ( S , A ) E t ( s , a ) = γ λ E t − 1 ( s , a ) + 1 ( S t = s , A t = a ) with E 0 ( s , a ) = 0 \begin{aligned} &Q(s,a) \leftarrow Q(s,a) + \alpha \delta_t E_t(s,a) \\ \text{where } &\delta_t = R_{t+1}+\gamma Q(S_{t+1},A_{t+1}) -Q(S,A)\\ &E_t(s,a) = \gamma \lambda E_{t-1}(s,a) + \mathbb{1}(S_t=s, A_t=a) \text{ with } E_0(s,a) = 0 \end{aligned} where Q(s,a)←Q(s,a)+αδtEt(s,a)δt=Rt+1+γQ(St+1,At+1)−Q(S,A)Et(s,a)=γλEt−1(s,a)+1(St=s,At=a) with E0(s,a)=0
5.4 Q-learning
Sarsa 更新Q值函数(式子(5-3)),是通过随机选择下一个 Q ( S ′ , A ′ ) Q(S^{\prime},A^{\prime}) Q(S′,A′), 通过多次重复的实验我们其实是用下一个Q值的平均值来计算。与Sarsa不同的是,Q-learning采用了取最大值的方式更新Q值:
Q ( S , A ) ← Q ( S , A ) + α ( R + γ m a x a ′ Q ( S ′ , a ′ ) − Q ( S , A ) ) \begin{aligned} Q(S,A) &\leftarrow Q(S,A) + \alpha(R+\gamma \ \underset{a^{\prime}}{max}Q(S^{\prime},a^{\prime}) -Q(S,A) ) \end{aligned} Q(S,A)←Q(S,A)+α(R+γ a′maxQ(S′,a′)−Q(S,A))
我们看下面这个表:
 Sarsa 和 Q-learning本质都是TD,都是online地更新Q值函数,以逼近采样的平均值(这也是TD不同于DP的地方)。只不过,Sarsa是只看一个A’,而Q-learning是看Q值最大的那个A’.
Sarsa 和 Q-learning本质都是TD,都是online地更新Q值函数,以逼近采样的平均值(这也是TD不同于DP的地方)。只不过,Sarsa是只看一个A’,而Q-learning是看Q值最大的那个A’.
6 值函数近似(value function approximation)
从model-based的DP, 到model-free的MC, TD, Sarsa, Q-learning等算法,我们更新状态值函数或者动作值函数时,都是准确地用到上一轮迭代产生的值函数。上一轮的值函数,存储在某个查找表格中,当这一轮迭代要用到时,就去表格中查找;这一轮计算完了之后,也就把表格更新了。像这样的能够把所有值函数存储在查找表格中、并准确地利用每一个值函数的方法,可以归结为Tabular Solution Method.
但现实问题中,状态或者状态-动作对的数量可能是极其大的,比如围棋中的状态数可以达到 1 0 170 10^{170} 10170. 这么大规模的数据,用表格的方法准确计算、记录每个值函数是不可行的。
因此,我们需要用一种近似的方法来估算值函数,即:
v ^ ( s , ω ) ≃ v π ( s ) or q ^ ( s , a , ω ) ≃ q π ( s , a ) \begin{aligned} &\hat{v}(s,\omega) \simeq v_{\pi}(s) \\ \text{or } &\hat{q}(s,a,\omega) \simeq q_{\pi}(s,a) \end{aligned} or v^(s,ω)≃vπ(s)q^(s,a,ω)≃qπ(s,a)
其中 ω \omega ω 是参数,是我们要去找的、使得 v ^ \hat{v} v^ 和 q ^ \hat{q} q^ 尽可能接近准确值的参数。
6.1 梯度下降(Gradient Descent)
假设 J ( ω ) J(\omega) J(ω)关于 ω \omega ω是可微的,则 J ( ω ) J(\omega) J(ω)的梯度可以写成:
∇ ω J ( ω ) = ( ∂ J ( ω ) ∂ ω 1 . . . ∂ J ( ω ) ∂ ω n ) \begin{aligned} \nabla_{\omega}J(\omega) = \begin{pmatrix} \frac{\partial J(\omega)}{\partial \omega_1}\\ .\\ .\\ .\\ \frac{\partial J(\omega)}{\partial \omega_n}\\ \end{pmatrix} \end{aligned} ∇ωJ(ω)=⎝⎜⎜⎜⎜⎜⎛∂ω1∂J(ω)...∂ωn∂J(ω)⎠⎟⎟⎟⎟⎟⎞
为了找到 J ( ω ) J(\omega) J(ω)的最小值, ω \omega ω的迭代更新算法应该是:
ω ← ω + Δ ω with Δ ω = − 1 2 α ∇ ω J ( ω ) \begin{aligned} &\omega \leftarrow \omega + \Delta \omega \\ \text{with } &\Delta \omega = - \frac{1}{2} \alpha \nabla_{\omega}J(\omega) \end{aligned} with ω←ω+ΔωΔω=−21α∇ωJ(ω)
α \alpha α叫做步长,是迭代更新的参数。
回到值函数近似。如果我们要找到 v ^ ( s , ω ) ≃ v π ( s ) \hat{v}(s,\omega) \simeq v_{\pi}(s) v^(s,ω)≃vπ(s),也就是要两者的差最小,那么我们将问题转化为使如下的 J ( ω ) J(\omega) J(ω)(叫目标函数)最小:
J ( ω ) = E π [ ( v π ( s ) − v ^ ( s , ω ) ) 2 ] J(\omega) = \Bbb{E}_{\pi} [ (v_{\pi}(s) - \hat{v}(s,\omega) )^2] J(ω)=Eπ[(vπ(s)−v^(s,ω))2]
则:
Δ ω = − 1 2 α ∇ ω J ( ω ) = α E π [ ( v π ( s ) − v ^ ( s , ω ) ) ∇ ω v ^ ( s , ω ) ] \begin{aligned} \Delta \omega &= - \frac{1}{2} \alpha \nabla_{\omega}J(\omega) \\ &= \alpha \Bbb{E}_{\pi} [(v_{\pi}(s) - \hat{v}(s,\omega) )\nabla_{\omega}\hat{v}(s,\omega)] \end{aligned} Δω=−21α∇ωJ(ω)=αEπ[(vπ(s)−v^(s,ω))∇ωv^(s,ω)]
不知道概率分布没法求期望,我们转而用随机梯度下降(Stochastic gradient descent)的方法,即:
Δ ω = α ( v π ( s ) − v ^ ( s , ω ) ) ∇ ω v ^ ( s , ω ) \begin{aligned} \Delta \omega &= \alpha (v_{\pi}(s) - \hat{v}(s,\omega) )\nabla_{\omega}\hat{v}(s,\omega) \end{aligned} Δω=α(vπ(s)−v^(s,ω))∇ωv^(s,ω)
6.2 线性函数近似
现在考虑怎么表示 v ^ ( s , ω ) \hat{v}(s,\omega) v^(s,ω). 一开始我们对值函数是一无所知的,但我们可以假设对于一个状态 s s s来说,它应该是由很多个特征(feature)共同影响的。比如智能体在某个状态时,它的速度、朝向、到某处的距离可能决定了它在这个状态的值函数。为了表征这些特征,我们可以用线性组合来表示 v ^ ( s , ω ) \hat{v}(s,\omega) v^(s,ω):
v ^ ( s , ω ) = X ( s ) T W = ∑ j = 1 n x j ( s ) w j \begin{aligned} \hat{v}(s,\omega) = X(s)^TW = \sum_{j=1}^n x_j(s)w_j \end{aligned} v^(s,ω)=X(s)TW=j=1∑nxj(s)wj
其中 X ( s ) X(s) X(s)是包含n个分量的特征列向量, x j ( s ) x_j(s) xj(s) 即是第j个分量, w j w_j wj是对应这个分量的参数,或者说权重。这时目标函数是:
J ( ω ) = E π [ ( v π ( s ) − X ( s ) T W ) 2 ] J(\omega) = \Bbb{E}_{\pi} [ (v_{\pi}(s) - X(s)^TW )^2] J(ω)=Eπ[(vπ(s)−X(s)TW)2]
参数更新方法:
(6-2) Δ ω = α ( v π ( s ) − v ^ ( s , ω ) ) X ( s ) \begin{aligned} \Delta \omega &= \alpha (v_{\pi}(s) - \hat{v}(s,\omega) )X(s)\tag{6-2} \end{aligned} Δω=α(vπ(s)−v^(s,ω))X(s)(6-2)
6.3 incremental method
式子(6-2)中用了 v π ( s ) v_{\pi}(s) vπ(s),这是真实的值函数,可是这里不是监督学习,没有标记,没人告诉我们真实值函数是什么。因此,我们需要用到MC和TD中的目标值代替 v π ( s ) v_{\pi}(s) vπ(s):
MC: Δ ω = α ( G t − v ^ ( S t , ω ) ) X ( S t ) TD: Δ ω = α ( R t + 1 + γ v ^ ( S t + 1 , ω ) − v ^ ( S t , ω ) ) X ( S t ) TD ( λ ) : Δ ω = α ( G t λ − v ^ ( S t , ω ) ) X ( S t ) \begin{aligned} \text{MC: } &\Delta \omega = \alpha (G_t - \hat{v}(S_t,\omega) )X(S_t) \\ \text{TD: } &\Delta \omega = \alpha (R_{t+1}+\gamma \hat{v}(S_{t+1},\omega) - \hat{v}(S_t,\omega) )X(S_t) \\ \text{TD}(\lambda) \text{: } &\Delta \omega = \alpha (G_t^{\lambda} - \hat{v}(S_t,\omega) )X(S_t) \\ \end{aligned} MC: TD: TD(λ): Δω=α(Gt−v^(St,ω))X(St)Δω=α(Rt+1+γv^(St+1,ω)−v^(St,ω))X(St)Δω=α(Gtλ−v^(St,ω))X(St)
上面这个是对于状态值函数的,用于prediction. 如果是control问题,对于动作值函数,我们可以写出相似的形式:
MC: Δ ω = α ( G t − q ^ ( S t , A t , ω ) ) X ( S t , A t ) TD: Δ ω = α ( R t + 1 + γ q ^ ( S t + 1 , A t + 1 , ω ) − v ^ ( S t , ω ) ) X ( S t , A t ) TD ( λ ) : Δ ω = α ( G t λ − q ^ ( S t , A t , ω ) ) X ( S t , A t ) \begin{aligned} \text{MC: } &\Delta \omega = \alpha (G_t - \hat{q}(S_t,A_t, \omega) )X(S_t, A_t) \\ \text{TD: } &\Delta \omega = \alpha (R_{t+1}+\gamma \hat{q}(S_{t+1},A_{t+1}, \omega) - \hat{v}(S_t,\omega) )X(S_t, A_t) \\ \text{TD}(\lambda) \text{: } &\Delta \omega = \alpha (G_t^{\lambda} - \hat{q}(S_t,A_t, \omega) )X(S_t,A_t) \\ \end{aligned} MC: TD: TD(λ): Δω=α(Gt−q^(St,At,ω))X(St,At)Δω=α(Rt+1+γq^(St+1,At+1,ω)−v^(St,ω))X(St,At)Δω=α(Gtλ−q^(St,At,ω))X(St,At)
以上这种更新 ω \omega ω的方法叫 incremental method,意思是每走一步就更新一次。
6.4 batch method
incremental method 更新很快,可是却有一个问题:每走一步更新一次,也就意味着每走一步丢弃一次数据,不能充分利用既有的学习经验。因此提出了与 incremental method 对应的 batch method.
考虑一个针对策略 π \pi π 的 prediction问题。智能体已经有了不少经验,所谓经验就是一系列的 ⟨ s t a t e , v a l u e ⟩ \langle state, value \rangle ⟨state,value⟩对。把经验定义成数据集 D \boldsymbol{D} D:
D = { ⟨ s 1 , v 1 π ⟩ , ⟨ s 2 , v 2 π ⟩ . . . ⟨ s n , v n π ⟩ } \boldsymbol{D} = \{ \langle s_1, v_1^{\pi} \rangle , \langle s_2 , v_2^{\pi} \rangle ... \langle s_n , v_n^{\pi} \rangle\} D={⟨s1,v1π⟩,⟨s2,v2π⟩...⟨sn,vnπ⟩}
如何确定参数 ω \omega ω,使得 v ^ ( s , ω ) \hat{v}(s,\omega) v^(s,ω)尽可能地 fit 数据集 D \boldsymbol{D} D?方法是 Least Squares (LS) 算法,思路很直接,就是最小化下面这个式子:
L S ( ω ) = ∑ t = 1 n ( v t π − v ^ ( S t , ω ) ) 2 = E D [ ( v π − v ^ ( S , ω ) ) 2 ] \begin{aligned} LS(\omega) &= \sum_{t=1}^n(v_t^{\pi} - \hat{v}(S_t,\omega) )^2 \\ &=\Bbb{E}_{\boldsymbol{D}}[(v^{\pi} - \hat{v}(S,\omega) )^2 ] \end{aligned} LS(ω)=t=1∑n(vtπ−v^(St,ω))2=ED[(vπ−v^(S,ω))2]
结合梯度下降的具体算法是:
- 抽样 ⟨ s , v π ⟩ ∼ D \langle s, v^{\pi} \rangle \sim \boldsymbol{D} ⟨s,vπ⟩∼D
- 迭代 Δ ω = α ( v ( s ) − v ^ ( s , ω ) ) ∇ ω v ^ ( s , ω ) \Delta \omega = \alpha (v(s) - \hat{v}(s,\omega) )\nabla_{\omega}\hat{v}(s,\omega) Δω=α(v(s)−v^(s,ω))∇ωv^(s,ω)
迭代至收敛,最后 ω π = a r g m i n ω L S ( ω ) \omega^{\pi} = \underset {\omega}{argmin} \ LS(\omega) ωπ=ωargmin LS(ω)
另一种batch method 是 Deep Q-Network (DQN), 思路和Q-learning 类似。这里我们把经验数据集拓展成:
D = { ⟨ s t , a t , r t + 1 , s t + 1 ⟩ } \boldsymbol{D} = \{ \langle s_t, a_t, r_{t+1}, s_{t+1} \rangle \} D={⟨st,at,rt+1,st+1⟩}
LS公式变成:
L S ( ω ) = E s , a , r , s ′ ∼ D [ ( r + γ Q ( s ′ , a ′ ; ω − ) − Q ( s , a ; ω ) ) 2 ] \begin{aligned} LS(\omega) &=\Bbb{E}_{s,a,r,s^{\prime} \sim \boldsymbol{D}}[(r + \gamma Q(s^{\prime},a^{\prime}; \omega^-)- Q(s,a; \omega) )^2 ] \end{aligned} LS(ω)=Es,a,r,s′∼D[(r+γQ(s′,a′;ω−)−Q(s,a;ω))2]