YOLOV7学习记录之mAP计算
如何评估一个训练好模型的好坏,是目标检测中一个很重要的因素,如常见的TP、FP、AP、PR、map等
视频可以参考:
https://www.bilibili.com/video/BV1ez4y1X7g2/?spm_id_from=333.337.search-card.all.click&vd_source=0afe6d9b487e848c06b62da15f2e659f
TP、FP、TN、FN
TP:被正确分类为正样本的数量;实际是正样本,也被模型分类为正样本
FP:被错误分类为正样本的数量;实际是负样本,但被模型分类为正样本
TN:被正确分类为负样本的数量;实际是负样本,也被模型分类为负样本
FN:被错误分类为负样本的数量;实际是正样本,但被模型分类为负样本
如下图举例:

红色是预测框,绿色是真实框。
假设阈值为0.5,意思就是预测框与真实框的IoU大于等于0.5时认为检测到目标了。
TP是IoU>0.5的检测框数量(在同一真实框下只计算一次),图中的框①。
FP是IoU<=0.5的检测框数量,图中的框②。
FN是没有被检测到的框数量,图中的框③。
Precision和Recall
Precision
计算公式:
P = TP / (TP + FP)
Precision是针对预测结果而言的,含义是在预测结果中,有多少预测框预测正确了。
但是光靠一个Precision指标是有缺陷的,比如在下面这种情况中:
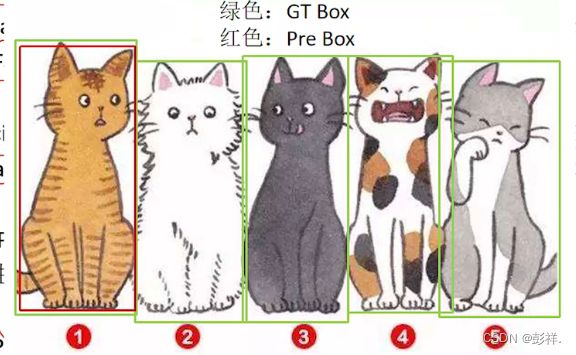
在预测结果中,预测正确的目标有一个,预测错误的目标有0个,所以TP=1,FP=0,则P=1,但是图中除了①,②③④⑤都没有检测出来,所以单靠一个Precision指标肯定是不行的。
Recall
计算公式:
R = TP / (TP + FN)
Recall是针对原样本而言的,含义是在所有真实目标中,模型预测正确目标的比例。
但是单靠Recall来判断模型预测结果好坏也不行,比如下面这种情况:此时TP为所以检测框,而FN=0,因为没有漏检,五只猫全部找到了,虽然找了很多

AP(P-R曲线下的面积)
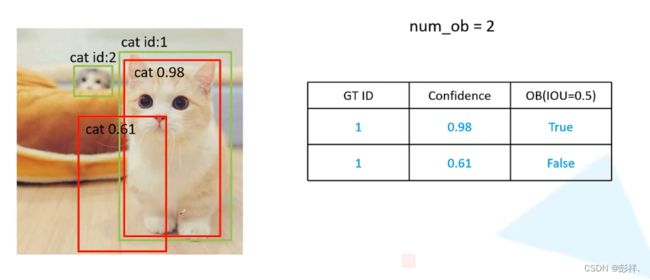
对于以下三张猫的图片,分别对每张图片进行统计,并存入一个表格中,这个表格是按照置信度降序排序的(只放入预测框):
此时真实框有两个,所有num_ob=2(num_ob是累加起来的),当IoU大于等于0.5时,认为检测到了目标。
此时num_ob=3,这张图片只有一个真实框,所以num_ob+=1

此时num_ob=7,这张图片有4个真实框,所以num_ob+=4

最后得到左边的一张表格,使用不同阈值(confidence)来判断是否匹配,此时我们使用confidence=0.98作为阈值来计算Precison和ReCall,最后我们依次调整confidence阈值,直至将其全部计算完毕。

最终结果,FP为被错误分为正样本数码,有两个False,即为2,TP为分类正确的数目(实际为正样本,被分为正样本),为5,FN为被错误分类为负样本数码(实际为正样本,被分为负样本),为7-5=2,最终我们将其全部计算完。

此时我们会得到右边的一张表格,按照这个表格,我们就可以绘制P-R曲线了,以ReCall为横坐标,Precision为纵坐标绘制,在绘制前需要删除一些Recall重复的数据,如图中的第五和第六个数据。我们保留Precision最大的即可。

注意,以上的预测框都是在经过非极大值抑制后的预测框。
mAP(mean Average Precision)
mAP是各类别AP的平均值,上面的0.6694就是猫所对应的AP值,采用这个方法,我们可以计算出所有类别所对应的AP值,再除以类别的个数,就得到了map。

执行流程
我们来梳理一下程序运行流程:
首先运行get_map.py,map计算应该在predict后完成的(predict主要是在图像中绘制出预测框),但这里分开了,也就需要我们要重新加载模型并预测输出然后在计算结果。
在get_map.py中其与predict一样初始化参数。随后
生成模型: yolo = YOLO(confidence = confidence, nms_iou = nms_iou)
获取预测结果:这里使用的是get_map_tx函数来获取预测类别,置信度,xy,w,h信息
执行预测
get_map_txt函数如下所示:
def get_map_txt(self, image_id, image, class_names, map_out_path):
f = open(os.path.join(map_out_path, "detection-results/"+image_id+".txt"), "w", encoding='utf-8')
image_shape = np.array(np.shape(image)[0:2])
#---------------------------------------------------------#
# 在这里将图像转换成RGB图像,防止灰度图在预测时报错。
# 代码仅仅支持RGB图像的预测,所有其它类型的图像都会转化成RGB
#---------------------------------------------------------#
image = cvtColor(image)
#---------------------------------------------------------#
# 给图像增加灰条,实现不失真的resize
# 也可以直接resize进行识别
#---------------------------------------------------------#
image_data = resize_image(image, (self.input_shape[1], self.input_shape[0]), self.letterbox_image)
#---------------------------------------------------------#
# 添加上batch_size维度
#---------------------------------------------------------#
image_data = np.expand_dims(np.transpose(preprocess_input(np.array(image_data, dtype='float32')), (2, 0, 1)), 0)
with torch.no_grad():
images = torch.from_numpy(image_data)
if self.cuda:
images = images.cuda()
#---------------------------------------------------------#
# 将图像输入网络当中进行预测!
#---------------------------------------------------------#
outputs = self.net(images)
outputs = self.bbox_util.decode_box(outputs)
#---------------------------------------------------------#
# 将预测框进行堆叠,然后进行非极大抑制
#---------------------------------------------------------#
results = self.bbox_util.non_max_suppression(torch.cat(outputs, 1), self.num_classes, self.input_shape,
image_shape, self.letterbox_image, conf_thres = self.confidence, nms_thres = self.nms_iou)
if results[0] is None:
return
top_label = np.array(results[0][:, 6], dtype = 'int32')
top_conf = results[0][:, 4] * results[0][:, 5]
top_boxes = results[0][:, :4]
for i, c in list(enumerate(top_label)):
predicted_class = self.class_names[int(c)]
box = top_boxes[i]
score = str(top_conf[i])
top, left, bottom, right = box
if predicted_class not in class_names:
continue
f.write("%s %s %s %s %s %s\n" % (predicted_class, score[:6], str(int(left)), str(int(top)), str(int(right)),str(int(bottom))))
f.close()
return
在get_map_txt函数中,依次进行图像灰度转换,图像非失真调整,将图像输入模型,将预测输出结果进行解码,将解码结果进行非极大值抑制,到此与与预测完全相同,随后将结果进行解析,将原本的应该在图像中绘制出预测框转换成txt文本形式输出,结果如下:
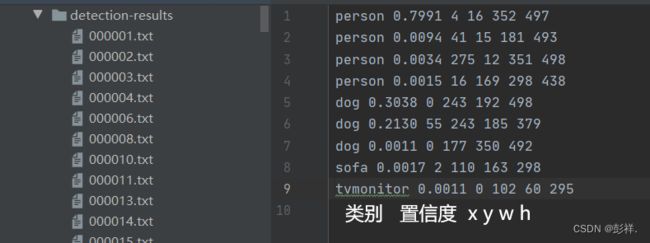
这里就对应类似

真实值xml2txt
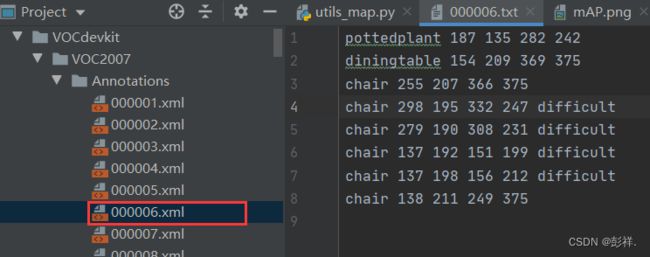
完成数据写入后,即获得了预测结果,再次回到get_map.py文件中继续执行:读取ground_truth,由于项目中使用的是VOC数据集,其标准格式为xml文件,这里需要进行转换为txt格式。
print("Get ground truth result.")
for image_id in tqdm(image_ids):
with open(os.path.join(map_out_path, "ground-truth/"+image_id+".txt"), "w") as new_f:
root = ET.parse(os.path.join(VOCdevkit_path, "VOC2007/Annotations/"+image_id+".xml")).getroot()
for obj in root.findall('object'):
difficult_flag = False
if obj.find('difficult')!=None:
difficult = obj.find('difficult').text
if int(difficult)==1:
difficult_flag = True
obj_name = obj.find('name').text
if obj_name not in class_names:
continue
bndbox = obj.find('bndbox')
left = bndbox.find('xmin').text
top = bndbox.find('ymin').text
right = bndbox.find('xmax').text
bottom = bndbox.find('ymax').text
if difficult_flag:
new_f.write("%s %s %s %s %s difficult\n" % (obj_name, left, top, right, bottom))
else:
new_f.write("%s %s %s %s %s\n" % (obj_name, left, top, right, bottom))
print("Get ground truth result done.")
在之前的学习中介绍使用的数据集是VOC但并未对其做太多介绍,这里对其标注内容简单介绍。
标注文件介绍:
<annotation>
<folder>VOC2007folder>
<filename>000005.jpgfilename>.
<source>
<database>The VOC2007 Databasedatabase>
<annotation>PASCAL VOC2007annotation>
<image>flickrimage>
<flickrid>325991873flickrid>
source>
<owner>
<flickrid>archintent louisvilleflickrid>
<name>?name>
owner>
<size>
<width>500width>
<height>375height>
<depth>3depth>
size>
<segmented>0segmented>
<object>
<name>chairname>
<pose>Rearpose>
<truncated>0truncated>
<difficult>0difficult>
<bndbox>
<xmin>263xmin>
<ymin>211ymin>
<xmax>324xmax>
<ymax>339ymax>
bndbox>
object>
annotation>
在我们的代码中获取object信息:

获得结果:

生成的 txt 文件与 xml 标注文件是一一对应的,其中有些会由于难以识别而后面加上 difficult
计算mAP
得到了真实值与预测值后我们就可以计算mAP了,按照前面原理中所介绍的,执行get_map函数,其实现位于util_map.py中,我们看一下其具体实现:
get_map(MINOVERLAP, draw_plot, score_threhold=0.5, path = './map_out')
参数介绍
MINOVERLAP = 0.5 ,当某一预测框与真实框重合度大于MINOVERLAP时,该预测框被认为是正样本,否则为负样本。
draw_plot=TRUE, 是否画图 score_threhold=0.5
Recall和Precision代表的是当门限值为0.5
path = ‘./map_out’ ,路径
执行get_map函数
前面是进行一些文件目录生成,如AP,F1等,接下来便是进行计算了,其计算过程代码实现还是蛮复杂的,但只要理解了前面所说的计算流程好懂了。我们来看一下其实现流程:
读取参数,设置文件目录信息
GT_PATH = os.path.join(path, 'ground-truth')
DR_PATH = os.path.join(path, 'detection-results')
IMG_PATH = os.path.join(path, 'images-optional')
TEMP_FILES_PATH = os.path.join(path, '.temp_files')
RESULTS_FILES_PATH = os.path.join(path, 'results')
show_animation = True
if os.path.exists(IMG_PATH):
for dirpath, dirnames, files in os.walk(IMG_PATH):
if not files:
show_animation = False
else:
show_animation = False
if not os.path.exists(TEMP_FILES_PATH):
os.makedirs(TEMP_FILES_PATH)
if os.path.exists(RESULTS_FILES_PATH):
shutil.rmtree(RESULTS_FILES_PATH)
else:
os.makedirs(RESULTS_FILES_PATH)
if draw_plot:
try:
matplotlib.use('TkAgg')
except:
pass
os.makedirs(os.path.join(RESULTS_FILES_PATH, "AP"))
os.makedirs(os.path.join(RESULTS_FILES_PATH, "F1"))
os.makedirs(os.path.join(RESULTS_FILES_PATH, "Recall"))
os.makedirs(os.path.join(RESULTS_FILES_PATH, "Precision"))
if show_animation:
os.makedirs(os.path.join(RESULTS_FILES_PATH, "images", "detections_one_by_one"))
读取ground_truth内容
for txt_file in ground_truth_files_list:#遍历ground_truth
file_id = txt_file.split(".txt", 1)[0]
file_id = os.path.basename(os.path.normpath(file_id))
temp_path = os.path.join(DR_PATH, (file_id + ".txt"))
if not os.path.exists(temp_path):
error_msg = "Error. File not found: {}\n".format(temp_path)
error(error_msg)
lines_list = file_lines_to_list(txt_file)#每行读取
bounding_boxes = []
is_difficult = False
already_seen_classes = []
for line in lines_list:
try:
if "difficult" in line:
class_name, left, top, right, bottom, _difficult = line.split()
is_difficult = True
else:
class_name, left, top, right, bottom = line.split()
except:
if "difficult" in line:
line_split = line.split()
_difficult = line_split[-1]
bottom = line_split[-2]
right = line_split[-3]
top = line_split[-4]
left = line_split[-5]
class_name = ""
for name in line_split[:-5]:
class_name += name + " "
class_name = class_name[:-1]
is_difficult = True
else:
line_split = line.split()
bottom = line_split[-1]
right = line_split[-2]
top = line_split[-3]
left = line_split[-4]
class_name = ""
for name in line_split[:-4]:
class_name += name + " "
class_name = class_name[:-1]
bbox = left + " " + top + " " + right + " " + bottom
if is_difficult:
bounding_boxes.append({"class_name":class_name, "bbox":bbox, "used":False, "difficult":True})
is_difficult = False
else:
bounding_boxes.append({"class_name":class_name, "bbox":bbox, "used":False})
if class_name in gt_counter_per_class:
gt_counter_per_class[class_name] += 1
else:
gt_counter_per_class[class_name] = 1
if class_name not in already_seen_classes:
if class_name in counter_images_per_class:
counter_images_per_class[class_name] += 1
else:
counter_images_per_class[class_name] = 1
already_seen_classes.append(class_name)
with open(TEMP_FILES_PATH + "/" + file_id + "_ground_truth.json", 'w') as outfile:
json.dump(bounding_boxes, outfile)
gt_classes = list(gt_counter_per_class.keys())
gt_classes = sorted(gt_classes)
n_classes = len(gt_classes)
读取预测结果内容
这里我们梳理一下其运行流程:
最外层循环:for class_index, class_name in enumerate(gt_classes)
按照分类类别进行循环
第二层循环:for idx, detection in enumerate(dr_data)
按照预测文件名称进行循环,如1.txt,2.txt
第三层循环: for obj in ground_truth_data
从真实标注文件中依次获得标注框并与预测框进行iou比对,保留iou值最大的(这里计算时为该图片内某个类别)
完成第三层循环后,判断是否变为TP,否则为FP
紧接着完成第二层循环,然后进行总结TP,FP,计算Precision和ReCall
cumsum = 0
for idx, val in enumerate(fp):
fp[idx] += cumsum
cumsum += val
cumsum = 0
for idx, val in enumerate(tp):
tp[idx] += cumsum
cumsum += val
rec = tp[:]
for idx, val in enumerate(tp):
rec[idx] = float(tp[idx]) / np.maximum(gt_counter_per_class[class_name], 1)
prec = tp[:]
for idx, val in enumerate(tp):
prec[idx] = float(tp[idx]) / np.maximum((fp[idx] + tp[idx]), 1)
接着便计算AP值,F1等,ap值计算代码如下:
def voc_ap(rec, prec):
"""
--- Official matlab code VOC2012---
mrec=[0 ; rec ; 1];
mpre=[0 ; prec ; 0];
for i=numel(mpre)-1:-1:1
mpre(i)=max(mpre(i),mpre(i+1));
end
i=find(mrec(2:end)~=mrec(1:end-1))+1;
ap=sum((mrec(i)-mrec(i-1)).*mpre(i));
"""
rec.insert(0, 0.0) # insert 0.0 at begining of list
rec.append(1.0) # insert 1.0 at end of list
mrec = rec[:]
prec.insert(0, 0.0) # insert 0.0 at begining of list
prec.append(0.0) # insert 0.0 at end of list
mpre = prec[:]
"""
This part makes the precision monotonically decreasing
(goes from the end to the beginning)
matlab: for i=numel(mpre)-1:-1:1
mpre(i)=max(mpre(i),mpre(i+1));
"""
for i in range(len(mpre)-2, -1, -1):
mpre[i] = max(mpre[i], mpre[i+1])
"""
This part creates a list of indexes where the recall changes
matlab: i=find(mrec(2:end)~=mrec(1:end-1))+1;
"""
i_list = []
for i in range(1, len(mrec)):
if mrec[i] != mrec[i-1]:
i_list.append(i) # if it was matlab would be i + 1
"""
The Average Precision (AP) is the area under the curve
(numerical integration)
matlab: ap=sum((mrec(i)-mrec(i-1)).*mpre(i));
"""
ap = 0.0
for i in i_list:
ap += ((mrec[i]-mrec[i-1])*mpre[i])
return ap, mrec, mpre
最终将所有AP值计算出后累加,除以class_num即可得到mAP了。
最终输出结果:
