深蓝学院-视觉SLAM课程-第2讲笔记--三维空间刚体运动
课程Github地址:https://github.com/wrk666/VSLAM-Course/tree/master
0. 内容
C++没有矩阵的运算,用别人的库来进行矩阵运算,其中Eigen库能够进行刚体运动的一些计算,由3部分构成:
- Core:矩阵的表达;
- Dense:稠密矩阵的计算,矩阵求逆,稠密矩阵的分解等;
- Geometry:旋转矩阵,欧拉角,四元数等。
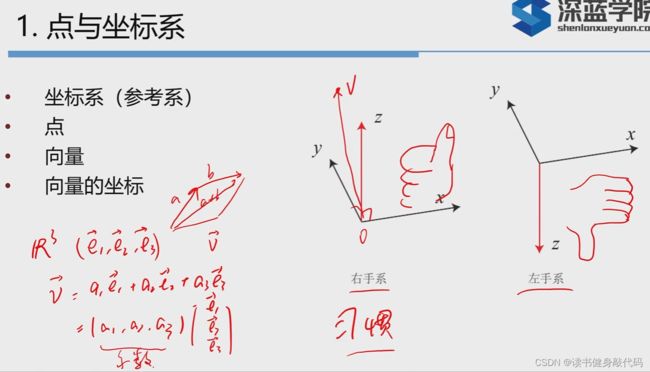
1. 点与坐标系
三维空间常用正交基来表示(常用右手系),一个向量是基底的线性组合,其系数就是这个向量在此空间的坐标
内积(点积)的结果是标量,
外积(叉积)的结果是向量
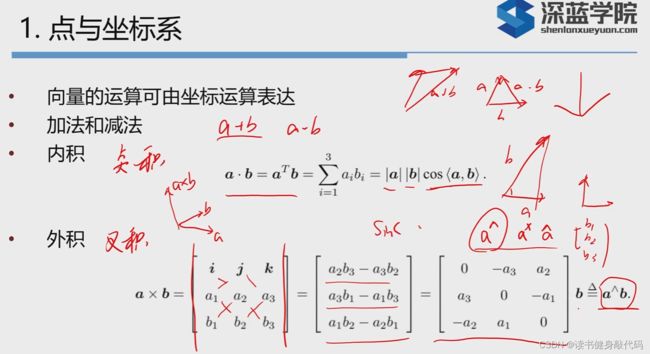
axb可以按行列式来写,也可以按照 a^ 来理解,写成a^b.若两向量平行,则叉积为0,此处的a^是一个反对称矩阵(罗德里格斯公式)
在SLAM中,坐标系有世界坐标系,机器人坐标系(不同传感器有各自的坐标系)
2. 旋转矩阵
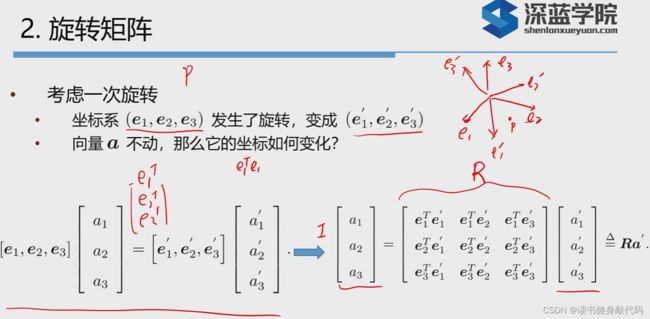
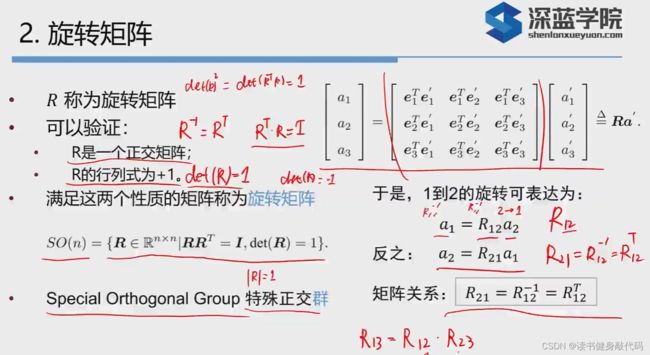
R称为旋转矩阵:
- R是一个正交矩阵: R − 1 = R T R^{-1}=R^T R−1=RT, R T R = I R^TR=I RTR=I
- d e t ( R ) = 1 det(R)=1 det(R)=1

SO:Sepcial Orthogonal Group特殊正交群。
2->1的旋转: a 1 = R 12 a 2 a_1 = R_{12}a_2 a1=R12a2,其中 R 12 R_{12} R12表示从2->1的旋转矩阵,从右读。(PPT上写错了)

R R R是[3,3]的向量, t t t是[3,1]的向量
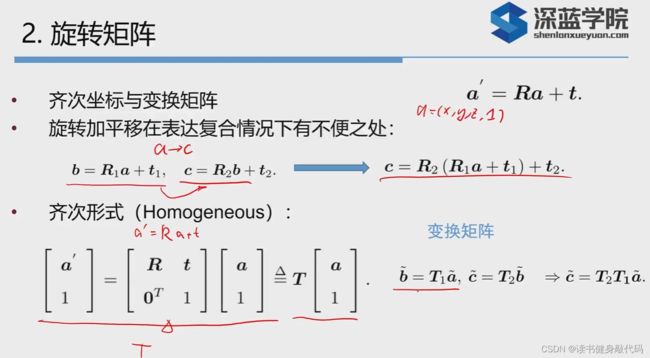
为方便运算,构造向量
a ~ = [ a 1 ] \tilde{a}= \begin{bmatrix} a\\ 1\\ \end{bmatrix} a~=[a1]
则
a ′ ~ = [ a ′ 1 ] = [ R t 0 T 1 ] a ~ = T a ~ \tilde{a^{'}}= \begin{bmatrix} a^{'}\\ 1 \end{bmatrix}= \begin{bmatrix} R&t\\ 0^T&1 \end{bmatrix}\tilde{a}=T\tilde{a} a′~=[a′1]=[R0Tt1]a~=Ta~
T叫变换矩阵。同理构造 b ~ = T 1 a ~ \tilde{b}=T_1\tilde{a} b~=T1a~, c ~ = T 2 b ~ \tilde{c}=T_2\tilde{b} c~=T2b~,其中 T 1 T_1 T1, T 2 T_2 T2在这里是[4,4]矩阵,可以进行运算,所以由a->c就可以简化表示为:
c ~ = T 2 T 1 a ~ \tilde{c}=T_2T_1\tilde{a} c~=T2T1a~
平移不是简单取反,还有旋转部分的逆的关系。(这里也算是个小坑,当时用四元数+平移来验证变换矩阵时踩了坑。)
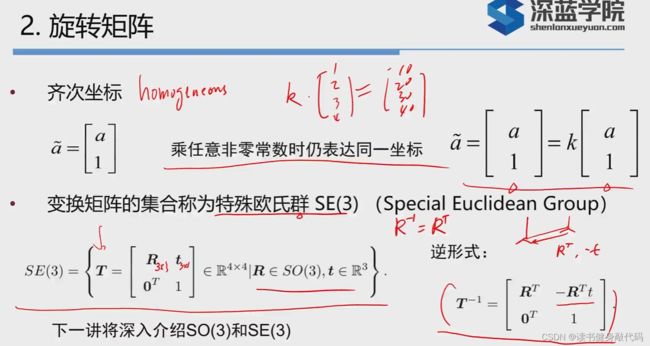
齐次坐标乘以任意非零常数后仍然表达同一坐标。上面构造的转换矩阵 T T T属于特殊欧式群 S E ( 3 ) SE(3) SE(3)(下一讲介绍)
S E ( 3 ) = [ R 3 ∗ 3 a 3 ∗ 1 0 T 1 ] SE(3)= \begin{bmatrix} R_{3*3}& a_{3*1}\\ 0^T& 1 \end{bmatrix} SE(3)=[R3∗30Ta3∗11]
3. 旋转向量和欧拉角
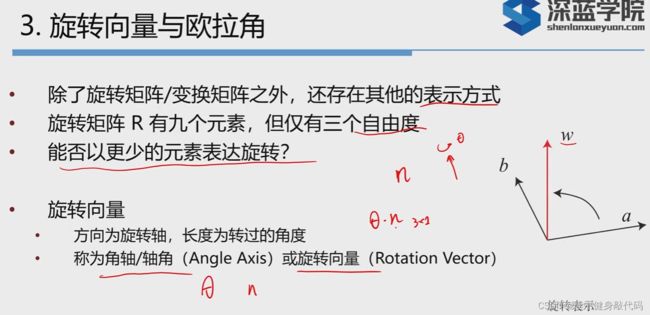
旋转向量的每个量都是一个角度和一个轴组成,旋转向量性质如下:
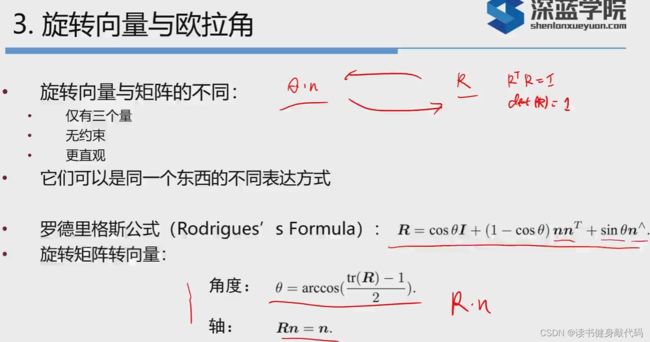
转换:
θ ∗ n \theta*n θ∗n(旋转向量)->旋转矩阵 R R R:罗德里格斯公式
旋转矩阵 R R R-> θ ∗ n \theta*n θ∗n旋转矩阵转向量的公式(也可以使用对数映射,但是不常用)
n n n可以看作 R R R的特征值为1的特征向量。

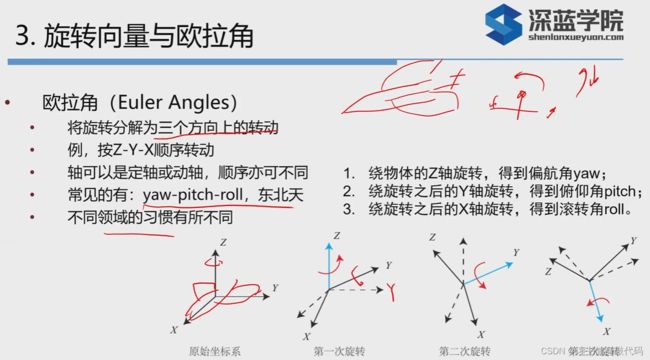
yaw-pitch-roll的定义有很多种(跟我之前做的陀螺仪加速度计的四元数姿态解算很密切),用之前要清楚到底是按照原来的轴转还是绕着旋转之后的轴转。
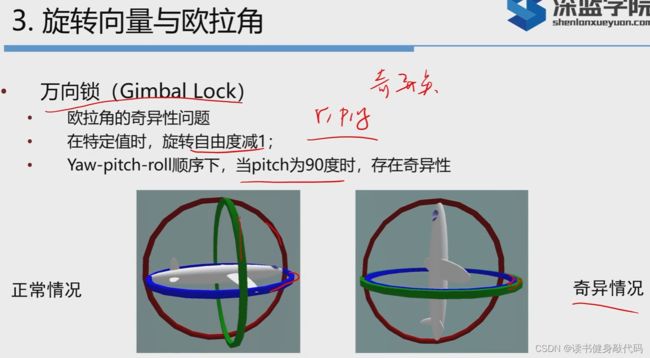
如上图,当pitch=90时,yaw和roll重叠了,只剩下两个自由度,这种情况叫做万向锁,可以证明,任何3自由量来描述3维旋转的情况都会碰到奇异点,任意一种欧拉角都会有奇异点,只是不同的定义方式下出现的情况不同。
4. 四元数(Quarterian)

由二维的单位复数扩展到3维的多个复数(3个虚部)
虚部的运算:和自己像复数,和别人算像叉积。
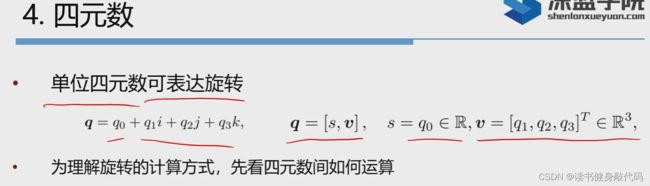
用实部和虚部部分组成一个向量来表示四元数
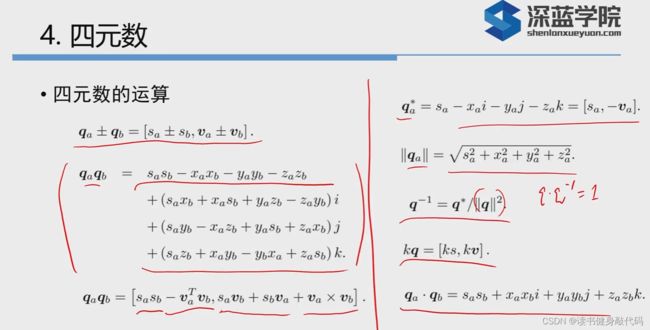
- 上图中 q a q b q_aq_b qaqb展开式的最后一行中应该是 + ( s a z b + x a y b − x b y a + z a s b ) k +(s_az_b+x_ay_b-x_by_a+z_as_b)k +(sazb+xayb−xbya+zasb)k。第三项错了。
按照 [ s a v a ] [s_a v_a] [sava]和 [ s b v b ] [s_b v_b] [sbvb]的形式更好理解 q a q b q_aq_b qaqb,标量乘向量不变,,再加上个向量的叉积(见第1节) - 定义共轭(虚部相反)
- 定义四元数范数
- 求逆,若是单位四元数,则其逆是其共轭
- 数乘
- element wise乘法
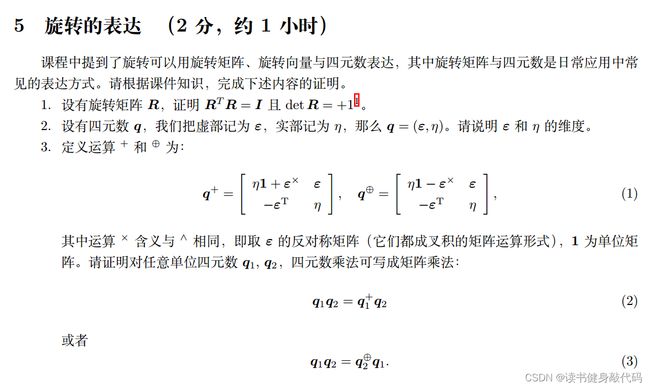
四元数乘法可以写成矩阵乘法,详见作业第5题:
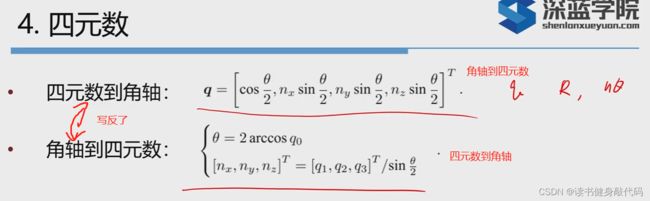
接下来是四元数<->角轴
四元数如何使用呢?(如何表示一个空间点的旋转呢?)
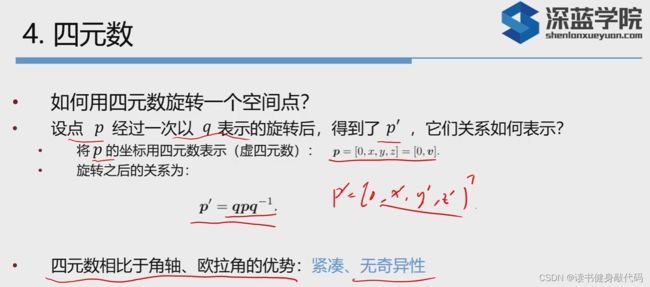
用此三维点的坐标和0来构建一个虚四元数 p p p,假设旋转后为 p ′ p^{'} p′,可以证明 p ′ p^{'} p′仍然是一个纯虚的四元数(到时候见作业)。实践中四元数用得较多,只用4个数,且没有歧义。
5. 实践–Eigen的初步使用
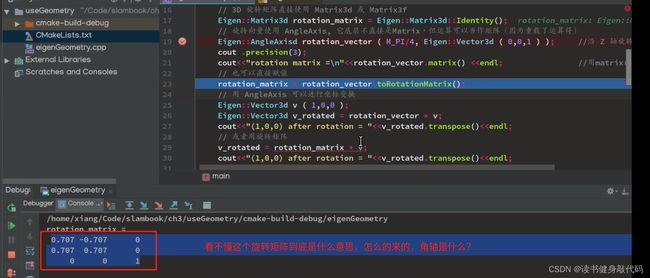
这里不太懂,等复习一下线性代数和矩阵论的知识后再来看看。