利用python通过三点法计算两个坐标系之间的位姿变换矩阵
calPoseFrom3Points
功能
已知坐标系a的原点、x轴正半轴上任一点和y轴正半轴上任一点在坐标系b下的坐标,求解坐标系a到坐标系b的旋转矩阵R和平移矩阵T。
原理
如图所示,点 O 2 O_2 O2为坐标系2的原点, P X P_X PX、 P Y P_Y PY分别在坐标系2的x、y轴的正半轴上。
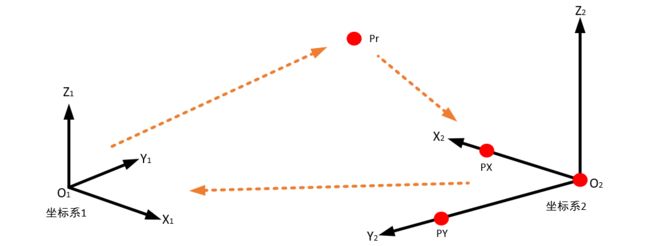
由点 P X 1 、 P Y 1 、 O 21 PX_1、PY_1、O_{21} PX1、PY1、O21三点构造出一个坐标系3( P X 1 、 P Y 1 、 O 21 PX_1、PY_1、O_{21} PX1、PY1、O21为坐标系1下各点的坐标),即 O 21 − X 3 Y 3 Z 3 O_{21}-X_3Y_3Z_3 O21−X3Y3Z3,坐标系3的XYZ轴指向与坐标系2相同。其中, O 21 O_{21} O21为坐标系3原点, O 21 O_{21} O21指向 P X 1 PX_1 PX1为X轴正方向, O 21 O_{21} O21指向 P Y 1 PY_1 PY1为Y轴正方向,Z轴由X轴和Y轴叉乘得到。即:
O 21 P X 1 ⃗ = P X 1 − O 21 \vec{O{21}PX_1}=PX_1 - O{21} O21PX1=PX1−O21
O 21 P Y 1 ⃗ = P Y 1 − O 21 \vec{O{21}PY_1}=PY_1 - O{21} O21PY1=PY1−O21
O 21 P Z 1 ⃗ = O 21 P X 1 ⃗ × O 21 P Y 1 ⃗ \vec{O{21}PZ_1}=\vec{O{21}PX_1}\times\vec{O{21}PY_1} O21PZ1=O21PX1×O21PY1
单位化:
O X 1 ⃗ = O 21 P X 1 ⃗ / ∣ ∣ O 21 P X 1 ⃗ ∣ ∣ \vec{OX_1}=\vec{O{21}PX_1}/||\vec{O{21}PX_1}|| OX1=O21PX1/∣∣O21PX1∣∣
O Y 1 ⃗ = O 21 P Y 1 ⃗ / ∣ ∣ O 21 P Y 1 ⃗ ∣ ∣ \vec{OY_1}=\vec{O{21}PY_1}/||\vec{O{21}PY_1}|| OY1=O21PY1/∣∣O21PY1∣∣
O Z 1 ⃗ = O 21 P Z 1 ⃗ / ∣ ∣ O 21 P Z 1 ⃗ ∣ ∣ \vec{OZ_1}=\vec{O{21}PZ_1}/||\vec{O{21}PZ_1}|| OZ1=O21PZ1/∣∣O21PZ1∣∣
记:
O X 1 ⃗ = ( a 1 , b 1 , c 1 ) \vec{OX_1}=(a_1,b_1,c_1) OX1=(a1,b1,c1)
O Y 1 ⃗ = ( a 2 , b 2 , c 2 ) \vec{OY_1}=(a_2,b_2,c_2) OY1=(a2,b2,c2)
O Z 1 ⃗ = ( a 3 , b 3 , c 3 ) \vec{OZ_1}=(a_3,b_3,c_3) OZ1=(a3,b3,c3)
O X 1 ⃗ , O Y 1 ⃗ , O Z 1 ⃗ \vec{OX_1},\vec{OY_1},\vec{OZ_1} OX1,OY1,OZ1在坐标系3中的矢量表示为:
O X 3 ⃗ = ( 1 , 0 , 0 ) \vec{OX_3}=(1,0,0) OX3=(1,0,0)
O Y 3 ⃗ = ( 0 , 1 , 0 ) \vec{OY_3}=(0,1,0) OY3=(0,1,0)
O Z 3 ⃗ = ( 0 , 0 , 1 ) \vec{OZ_3}=(0,0,1) OZ3=(0,0,1)
坐标系3到坐标系1的旋转矩阵为:
R 31 = [ a 1 a 2 a 3 b 1 b 2 b 3 c 1 c 2 c 3 ] R_{31}=\left[\begin{matrix} a_1&a_2&a_3\\ b_1&b_2&b_3\\ c_1&c_2&c_3 \end{matrix}\right] R31=⎣⎡a1b1c1a2b2c2a3b3c3⎦⎤
由于坐标系3坐标轴指向与坐标系2坐标轴指向完全相同,因此坐标系3与坐标系2的旋转矩阵为单位矩阵,所以坐标系2到坐标系1的旋转矩阵 R 21 = R 31 R_{21}=R_{31} R21=R31。
由于 O 21 = R 21 ⋅ O 2 + T O_{21}=R_{21} \cdot O_2 +T O21=R21⋅O2+T且 O 2 = ( 0 , 0 , 0 ) O_2 = (0,0,0) O2=(0,0,0),因此 T 21 = O 21 T_{21}=O_{21} T21=O21
使用
输入
坐标系a的原点在坐标系b下的坐标 O a b ( x 1 , y 1 , z 1 ) O_{ab}(x_1,y_1,z_1) Oab(x1,y1,z1)
坐标系a的x轴正半轴上任一点在坐标系b下的坐标 P x b ( x 2 , y 2 , z 2 ) P_{xb}(x_2,y_2,z_2) Pxb(x2,y2,z2)
坐标系a的y轴正半轴上任一点在坐标系b下的坐标 P x b ( x 3 , y 3 , z 3 ) P_{xb}(x_3,y_3,z_3) Pxb(x3,y3,z3)
输出
坐标系a到坐标系b的旋转矩阵 R a b R_{ab} Rab和平移矩阵 T a b T_{ab} Tab
DEMO
import geomeas as gm
import numpy as np
Oab = np.array([-37.84381632, 152.36389864, 41.68600167])
Pxb = np.array([-19.59820338, 139.58818292, 45.55380309])
Pyb = np.array([-38.23270656, 157.3130709, 59.86810327])
print(gm.Pose().calPoseFrom3Points(Oab, Pxb, Pyb))
链接
https://gitee.com/huangzhexiaohao/geo-meas/blob/master/src/geomeas.py