OpenCV-针对不同分辨率的匹配操作
针对不同分辨率的匹配操作
- 项目要求
-
- OpenCV模板匹配
-
- 模板匹配的工作方式
- 模板匹配的匹配方式
- 模板匹配存在的问题
- 解决方法
-
- 方法1:直方图+自适应模板匹配
-
- 结果
- 方法二:SIFT
-
- 效果
- 方法三:灰度匹配+模板匹配
-
- 结果和结论
项目要求
有一个需要,在UI自动化中,我们需要匹配某个元素在app中的位置,如何获取该元素的位置呢?一般可以通过Automation ID或者XPath,但是,有些控件或者元素,它无法通过这种方法定位,所以,我们把问题抽象成在一张图片中,框出目标元素的位置。
OpenCV模板匹配
模板匹配的工作方式
模板匹配的工作方式跟直方图的反向投影基本一样,大致过程是这样的:通过在输入图像上滑动图像块对实际的图像块和输入图像进行匹配。
假设我们有一张100x100的输入图像,有一张10x10的模板图像,查找的过程是这样的:
(1)从输入图像的左上角(0,0)开始,切割一块(0,0)至(10,10)的临时图像;
(2)用临时图像和模板图像进行对比,对比结果记为c;
(3)对比结果c,就是结果图像(0,0)处的像素值;
(4)切割输入图像从(0,1)至(10,11)的临时图像,对比,并记录到结果图像;
(5)重复(1)~(4)步直到输入图像的右下角。
大家可以看到,直方图反向投影对比的是直方图,而模板匹配对比的是图像的像素值;模板匹配比直方图反向投影速度要快一些,但是我个人认为直方图反向投影的鲁棒性会更好。
模板匹配的匹配方式
在OpenCv和EmguCv中支持以下6种对比方式:
CV_TM_SQDIFF 平方差匹配法:该方法采用平方差来进行匹配;最好的匹配值为0;匹配越差,匹配值越大。
CV_TM_CCORR 相关匹配法:该方法采用乘法操作;数值越大表明匹配程度越好。
CV_TM_CCOEFF 相关系数匹配法:1表示完美的匹配;-1表示最差的匹配。
CV_TM_SQDIFF_NORMED 归一化平方差匹配法
CV_TM_CCORR_NORMED 归一化相关匹配法
CV_TM_CCOEFF_NORMED 归一化相关系数匹配法
根据我的测试结果来看,上述几种匹配方式需要的计算时间比较接近(跟《学习OpenCV》书上说的不同),我们可以选择一个能适应场景的匹配方式。
模板匹配存在的问题
1.对于分辨率不同的图片,它无法正常匹配。在实际的任务中,我们的模板图片可能发生分辨率的改变。
2.对于些许形变的图片,它也无法正常匹配。
3.截图内容无法匹配。
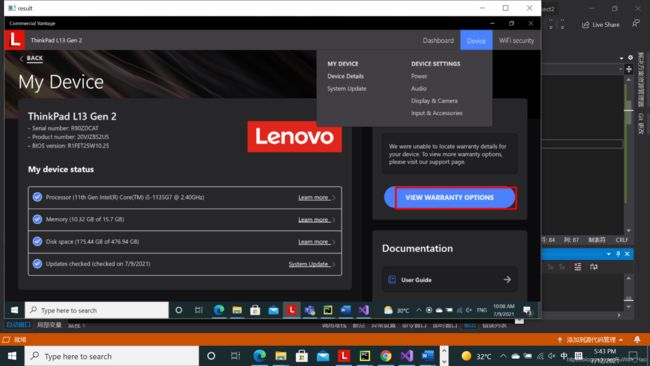
原图:
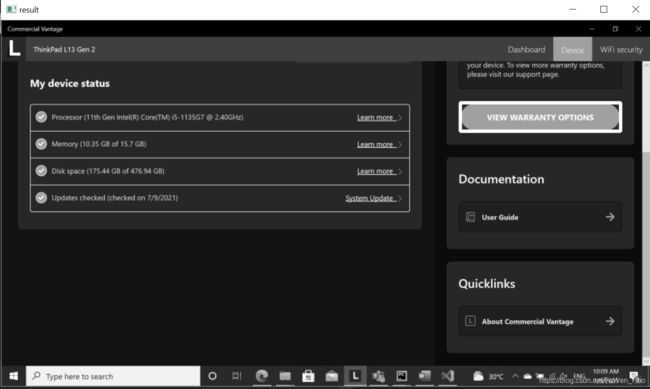
传统匹配结果:

关于自适应屏幕显示:
#include 但是为了完整得显示图片,多次尝试发现,flag参数为WINDOW_NORMAL时才可以在手动调整窗口的条件下显示完整的图片。
解决方法
方法1:直方图+自适应模板匹配
#includehistogram.h
//直方图比较
#include大致思路:
给定的模板,它已经是分辨率比较低的了,我们只能改变截图,根据,每次缩放截图,我们把结果用map存起来,map的key为直方图相似度,value为Point和Rect(该点坐标和对比的图),通过,map自动排序。
结果
方法二:SIFT
#!/usr/bin/env python
# Python 2/3 compatibility
from __future__ import print_function
import numpy as np
import cv2
def init_feature():
# SIFT匹配
detector = cv2.SIFT_create(700)
# BRISK匹配
#cv2.BRISK_create()
# 归一化
norm = cv2.NORM_L2
#cv2.NORM_L2
# 特征值全匹配
matcher = cv2.BFMatcher(norm)
return detector, matcher
def filter_matches(kp1, kp2, matches, ratio = 0.75):
mkp1, mkp2 = [], []
for m in matches:
if len(m) == 2 and m[0].distance < m[1].distance * ratio:
m = m[0]
mkp1.append( kp1[m.queryIdx] )
mkp2.append( kp2[m.trainIdx] )
p1 = np.float32([kp.pt for kp in mkp1])
p2 = np.float32([kp.pt for kp in mkp2])
kp_pairs = zip(mkp1, mkp2)
return p1, p2, kp_pairs
def explore_match(win, img1, img2, kp_pairs, status = None, H = None):
h1, w1 = img1.shape[:2]
h2, w2 = img2.shape[:2]
vis = np.zeros((max(h1, h2), w1+w2), np.uint8)
vis[:h1, :w1] = img1
vis[:h2, w1:w1+w2] = img2
vis = cv2.cvtColor(vis, cv2.COLOR_GRAY2BGR)
if H is not None:
corners = np.float32([[0, 0], [w1, 0], [w1, h1], [0, h1]])
corners = np.int32( cv2.perspectiveTransform(corners.reshape(1, -1, 2), H).reshape(-1, 2) + (w1, 0) )
cv2.polylines(vis, [corners], True, (0, 0, 255))
cv2.imshow(win, vis)
return vis
if __name__ == '__main__':
img1 = cv2.imread('button.png', 0)
img2 = cv2.imread('test1.png', 0)
smaller_img1 = cv2.resize(img1, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
smaller_img2 = cv2.resize(img2, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
detector, matcher = init_feature()
kp1, desc1 = detector.detectAndCompute(smaller_img1, None)
kp2, desc2 = detector.detectAndCompute(smaller_img2, None)
raw_matches = matcher.knnMatch(desc1, trainDescriptors = desc2, k = 2)
p1, p2, kp_pairs = filter_matches(kp1, kp2, raw_matches)
if len(p1) >= 4:
H, status = cv2.findHomography(p1, p2, cv2.RANSAC, 5.0)
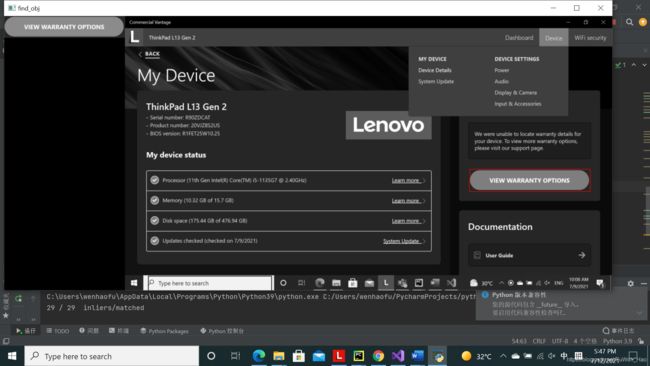
print('%d / %d inliers/matched' % (np.sum(status), len(status)))
vis = explore_match('find_obj', smaller_img1, smaller_img2, kp_pairs, status, H)
cv2.waitKey()
cv2.destroyAllWindows()
else:
print('%d matches found, not enough for homography estimation' % len(p1))
通过,缩放和SIFT。其实际效果,有时候并不好。
效果

方法三:灰度匹配+模板匹配
GrayMatching.h
#include 结果和结论
![]()

![]()

直方图8.186s,灰度匹配2.212s,此方法速度快。而且,匹配精度高。