halcon找矩形顶点的一种方法
主程序:
read_image (Image11, '11')
*画仿射矩形
dev_set_color ('green')
draw_rectangle2 (3600, Row, Column, Phi, Length1, Length2)
*生成仿射矩形xld
gen_rectangle2_contour_xld (Rectangle, Row, Column, Phi, Length1, Length2)
*找顶点工具(基于卡尺工具)
peak (Image11, Row, Column, Phi, Length1, Length2, 2, 0.41, 20, 'negative', 'first', EdgesY, EdgesX, ResultRow, ResultColumn)
*显示图像
dev_display (Image11)
*显示仿射矩形
dev_display (Rectangle)
*显示所有边缘点
if(|EdgesY|>0)
dev_set_color ('yellow')
gen_cross_contour_xld (Cross, EdgesY, EdgesX, 0.5, 0)
*显示顶点
dev_set_color ('green')
gen_cross_contour_xld (Cross,ResultRow, ResultColumn, 3, 0)
*显示顶点坐标
disp_message (3600, 'x:='+ResultColumn+'\r\ny:'+ResultRow, 'image', ResultRow, ResultColumn, 'blue', 'false')
endif
peak函数:

*初始化
ResultRow:=-9999
ResultCol:=-9999
EdgeColumns := []
EdgeRows := []
*仿射矩形Length2所在直线作为rake工具的ROI
ROILineRow1:=0
ROILineCol1:=0
ROILineRow2:=0
ROILineCol2:=0
*仿射矩形方向所直线的边做基准线
StdLineRow1:=0
StdLineCol1:=0
StdLineRow2:=0
StdLineCol2:=0
*判断仿射矩形是否有效
if(Length1<=0 or Length2<=0)
return()
endif
*计算仿射矩形角度的正弦值、余弦值
tuple_cos (Phi, Cos)
tuple_sin (Phi, Sin)
*矩形第一个端点坐标
Col1 := 1.0*( Coloumn-Length1*Cos - Length2*Sin)
Row1 := 1.0*(Row-(-Length1*Sin + Length2*Cos))
*矩形第二个端点坐标
Col2 := 1.0*(Coloumn+Length1*Cos - Length2*Sin)
Row2 := 1.0*(Row-(Length1*Sin + Length2*Cos))
*矩形第三个端点坐标
Col3 := 1.0*(Coloumn+Length1*Cos + Length2*Sin)
Row3 := 1.0*(Row-(Length1*Sin - Length2*Cos))
*矩形第四个端点坐标
Col4 := 1.0*(Coloumn-Length1*Cos + Length2*Sin)
Row4 := 1.0*(Row-(-Length1*Sin - Length2*Cos))
*仿射矩形方向所直线的边做基准线
StdLineRow1:=Row2
StdLineCol1:=Col2
StdLineRow2:=Row3
StdLineCol2:=Col3
*仿射矩形Length2所在直线作为rake工具的ROI
ROILineRow1 := (Row1+Row2)*0.5
ROILineCol1:= (Col1+Col2)*0.5
ROILineRow2 := (Row3+Row4)*0.5
ROILineCol2:= (Col3+Col4)*0.5
* gen_rectangle2_contour_xld (Rectangle, Row, Coloumn, Phi, Length1, Length2)
rake (Image, Regions1, 1.0*Length2*2, Length1*2, DetectWidth, Sigma, Threshold, Transition, Select, ROILineRow1, ROILineCol1, ROILineRow2, ROILineCol2, ResultRows, ResultColumns)
*求所有边缘点到基准线的距离,保存最大距离及其对应的边缘点坐标,作为顶点
Max:=0
if(|ResultColumns|>0)
EdgeRows := ResultRows
EdgeColumns := ResultColumns
for i := 0 to |ResultColumns|-1 by 1
distance_pl (ResultRows[i], ResultColumns[i], StdLineRow1, StdLineCol1, StdLineRow2, StdLineCol2, Distance1)
if(Max<Distance1)
Max:=Distance1
ResultRow:=ResultRows[i]
ResultColumn:=ResultColumns[i]
endif
endfor
endif
return ( )
rake函数:
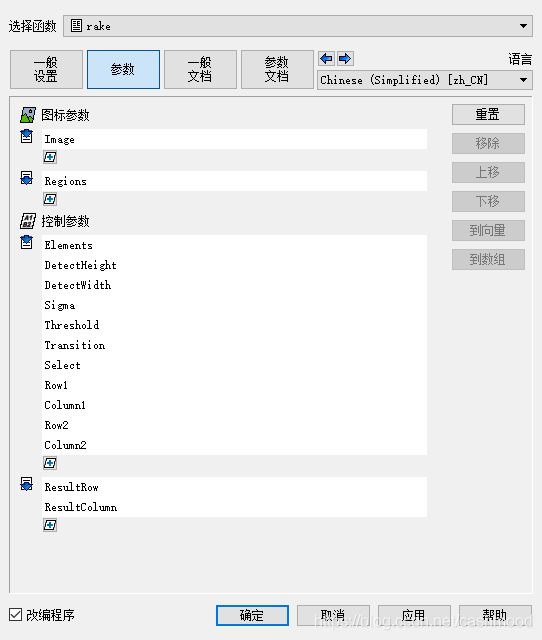
*获取图像尺寸
get_image_size(Image,Width,Height)
*产生一个空显示对象,用于显示
gen_empty_obj(Regions)
*初始化边缘坐标数组
ResultRow := []
ResultColumn := []
*产生直线xld
gen_contour_polygon_xld (RegionLines, [Row1,Row2], [Column1,Column2])
*存储到显示对象
concat_obj(Regions, RegionLines, Regions)
*计算直线与x轴的夹角,逆时针方向为正向。
angle_lx (Row1, Column1, Row2, Column2, ATan)
*边缘检测方向垂直于检测直线:直线方向正向旋转90°为边缘检测方向
ATan:=ATan+rad(90)
*根据检测直线按顺序产生测量区域矩形,并存储到显示对象
for i:=1 to Elements by 1
* RowC := Row1+(((Row2-Row1)*i)/(Elements+1))
* ColC := Column1+(Column2-Column1)*i/(Elements+1)
* if (RowC>Height-1 or RowC<0 or ColC>Width-1 or ColC<0)
* continue
* endif
*如果只有一个测量矩形,作为卡尺工具,宽度为检测直线的长度
if(Elements=1)
RowC := 1.0*(Row1+Row2)*0.5
ColC := 1.0*(Column1+Column2)*0.5
*判断是否超出图像,超出不检测边缘
if (RowC>Height-1 or RowC<0 or ColC>Width-1 or ColC<0)
continue
endif
distance_pp(Row1, Column1, Row2, Column2, Distance)
DetectWidth:=Distance
gen_rectangle2_contour_xld(Rectangle, RowC, ColC,ATan, 1.0*DetectHeight/2,1.0*Distance/2)
else
*如果有多个测量矩形,产生该测量矩形xld
RowC := 1.0*(Row1+(((Row2-Row1)*(i-1))/(Elements-1)))
ColC := 1.0*(Column1+(Column2-Column1)*(i-1)/(Elements-1))
*判断是否超出图像,超出不检测边缘
if (RowC>Height-1 or RowC<0 or ColC>Width-1 or ColC<0)
continue
endif
gen_rectangle2_contour_xld(Rectangle, RowC, ColC, ATan, 1.0*DetectHeight/2,1.0*DetectWidth/2)
endif
*把测量矩形xld存储到显示对象
concat_obj (Regions, Rectangle, Regions)
if(i=1)
*在第一个测量矩形绘制一个箭头xld,用于只是边缘检测方向
RowL2:=RowC+DetectHeight/2*sin(-ATan)
RowL1:=RowC-DetectHeight/2*sin(-ATan)
ColL2:=ColC+DetectHeight/2*cos(-ATan)
ColL1:=ColC-DetectHeight/2*cos(-ATan)
gen_arrow_contour_xld (Arrow1, RowL1, ColL1, RowL2, ColL2, 25, 25)
*把xld存储到显示对象
concat_obj (Regions, Arrow1, Regions)
endif
*产生测量对象句柄
gen_measure_rectangle2(RowC, ColC,ATan, DetectHeight/2,DetectWidth/2,Width, Height, 'nearest_neighbor', MsrHandle_Measure)
*设置极性
if (Transition = 'negative')
Transition := 'negative'
else
if (Transition = 'positive')
Transition := 'positive'
else
Transition := 'all'
endif
endif
*设置边缘位置。最强点是从所有边缘中选择幅度绝对值最大点,需要设置为'all'
if (Select = 'first')
Select := 'first'
else
if (Select = 'last')
Select := 'last'
else
Select := 'all'
endif
endif
*检测边缘
measure_pos (Image, MsrHandle_Measure, Sigma, Threshold, Transition, Select, RowEdge, ColEdge, Amplitude, Distance)
*清除测量对象句柄
close_measure(MsrHandle_Measure)
*临时变量初始化
*tRow,tCol保存找到指定边缘的坐标
tRow := 0
tCol := 0
*t保存边缘的幅度绝对值
t:= 0
*找到的边缘必须至少为1个
tuple_length(RowEdge, Number)
if(Number<1)
continue
endif
*有多个边缘时,选择幅度绝对值最大的边缘
for j:=0 to Number-1 by 1
if(abs(Amplitude[j])>t)
tRow := RowEdge[j]
tCol := ColEdge[j]
t := abs(Amplitude[j])
endif
endfor
*把找到的边缘保存在输出数组
if(t>0)
ResultRow:=[ResultRow,tRow]
ResultColumn:=[ResultColumn,tCol]
endif
endfor
return ()