动手学深度学习---从全连接层到卷积层篇
卷积神经网络
1.从全连接层到卷积层
前言:MLP适合处理表格数据,行对应样本,列对应特征。但对于高维感知数据,就会变得不实用
(数据量过于庞大,需要大量GPU和耐心)
采用卷积神经网路(convolutional neural networks,CNN)时机器学习利用自然图像中一些已知结构的创造性方法
-
不变性
不变性意味着即使目标的外观发生了某种变化,但是你依然可以把它识别出来。这对图像分类来说是一种很好的特性,因为我们希望图像中目标无论是被平移,被旋转,还是被缩放,甚至是不同的光照条件、视角,都可以被成功地识别出来。
所以上面的描述就对应着各种不变性:
- 平移不变性:Translation Invariance
- 旋转/视角不变性:Ratation/Viewpoint Invariance
- 尺度不变性:Size Invariance
- 光照不变性:Illumination Invariance
①平移不变性
比如对图像分类任务来说,图像中的目标不管被移动到图片的哪个位置,得到的结果(标签)应该是相同的,这就是卷积神经网络中的平移不变性。
②局部性
神经网络的前面几层应该只探索输入图像中的局部区域,而不过度在意图像中相隔较远区域的关系,这就是“局部性”原则。最终聚合这些局部特征,以在整个图像级别进行预测。
-
多层感知机的限制
这里的数学运算我存在问题,后续补充
2.图像卷积
前言:上一节我们解析了卷积层的数学原理,现在我们来看看它的实际应用
-
互相换运算
#####################################
严格来说卷积只是一种称谓,他所表达的运算实际是互相关运算(cross-correlation)。
#####################################
#这句话可能有错
所谓cross-correlation 实际是输入tensor与核tensor通过互相关运算产生输出张量,下面我们通过图解来解释cross-correlation
我们暂时忽略channel(第三维)情况,看看如何处理二维图像数据和隐藏表示(即经过cross-correlation得到的输出)
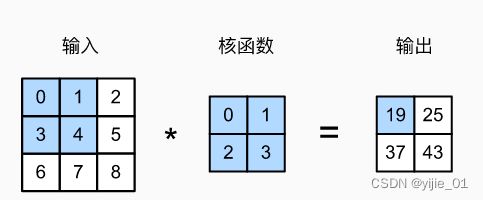
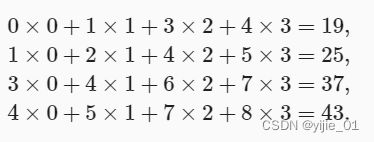
在二维的 cross-correlation中,卷积窗口从输入tensor的左上角开始,从左到右、从上到下。每当卷积窗口到达新位置时,在窗口内的tensor与卷积核tensor进行按元素相乘再相加得到隐藏表示的单一标量像素值。如上述例子,互相关运算如下:
注意, 卷积核只与图像中每个大小完全适合的位置进行互相关运算,不满足则继续滑动直到满足位置 输出tensor窗口大小公式如下:(n 为输入的tensor,k为卷积核)
![]()
接下来,我们在corr2d函数中用代码实现上述卷积操作:
import torch
from torch import nn
from d2l import torch as d2l
def corr2d(X,K):
"""计算二维互相关运算"""
h,w=K.shape #得到卷积核(kernel)的行长、宽长
#创建一个与隐藏表示同样形状的全为0的tensor
Y=torch.zeros((X.shape[0]-K.shape[0]+1,X.shape[1]-K.shape[1]+1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
#按元素重新一个个填充
Y[i,j]=(X[i:i+h,j:j+w]*K).sum() #得到进行互相关运算后的隐藏表示,步长为1
return Y
X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]])
K = torch.tensor([[0.0, 1.0], [2.0, 3.0]])
corr2d(X, K)
result:
tensor([[19., 25.],
[37., 43.]])
-
卷积层
卷积层对输入和卷积核权重进行互相关运算,并在添加标量偏置之后产生输出。 所以,卷积层中的两个被训练的参数是卷积核权重和标量偏置。 就像我们之前随机初始化全连接层一样,在训练基于卷积层的模型时,我们也随机初始化卷积核权重。
基于上面定义的corr2d函数实现二维卷积层。在__init__构造函数中,将weight和bias声明为两个模型参数。前向传播函数调用corr2d函数并添加偏置。
class Conv2D(nn.module):
def __init__(self,kernel_size):#kernel_size为卷积核的shape
super().__init__()
#weight为Conv2D的属性,self.weight是Paramter类的实例
self.weight=nn.Parameter(torch.rand(kernel_size))#初始化卷积核权重
self.bias=nn.Parameter(torch.zeros(1))
def forword(self,X):
return corr2d(X,self.weight)+self.bias #广播机制
高度和宽度分别为h和w的卷积核可以被称为h×w卷积或h×w卷积核。 我们也将带有h×w卷积核的卷积层称为h×w卷积层。
-
图像中目标的边缘检测
如下是卷积层的一个简单应用:通过找到像素变化的位置,来检测图像中不同颜色的边缘。 首先,我们构造一个6×8像素的黑白图像。中间四列为黑色(0),其余像素为白色(1)。
X=torch.ones((6,8))
X[:,2:6]=0
X
result:
tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
接下来,我们构造h=1,w=2的卷积核K。
当进行互相关运算时,如果水平相邻的两元素相同,则输出为零,否则输出为非零。
K = torch.tensor([[1.0, -1.0]])
现在,我们对参数X(输入)和K(卷积核)执行互相关运算。 如下所示,输出Y中的1代表从白色到黑色的边缘,-1代表从黑色到白色的边缘,其他情况的输出为0。
Y = corr2d(X, K)
Y
result:
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
现在我们将输入的二维图像转置,再进行如上的互相关运算。 其输出如下,之前检测到的垂直边缘消失了。 不出所料,这个卷积核K只可以检测垂直边缘,无法检测水平边缘。
corr2d(X.t(), K)
result:
tensor([[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.]])
-
学习卷积核
当有更复杂的情况时,我们不可能手动设计滤波器,那么我们是否可以学习由X生成Y的卷积核呢?
下面,我们首先构造一个卷积层(具有卷积核weight,bias,forword函数等),并将卷积核初始化为随机tensor。接下来我,在每个epoch中,我们比较Y与卷积层的输出的平方误差,然后据此计算gradient来更新卷积核。为简单起见,我们直接采取内置的二维卷积层,并忽略bias
# 构造一个二维卷积层,它具有1个输出通道和形状为(1,2)的卷积核
#最前面的1,1为in_channels,out_channels
# 这个二维卷积层使用四维输入和输出格式(输出通道、输入通道、高度、宽度),
# 其中批量大小和通道数都为1
conv2d=nn.Conv2d(1,1,kernel_size=(1,2),bias=False)
X=X.reshape((1,1,6,8))
Y=Y.reshape((1,1,6,7))
lr=3e-2 #学习率
for i in range(10):#训练的基本不走
y_hat=conv2d(X)
l=(Y-y_hat)**2
con2d.zero_grad()
l,sum().backward()#损失函数求导,得到loss关于卷积核的导数
#迭代卷积核,即卷积核(权重)更新
conv2d.weight.data[:]-=lr*conv2d.weight.grad
if (i+1)%2==0:
print(f'epoch {i+1}, loss {l.sum():.3f}')
-
互相关与卷积
???因为前一小节未充分理解,所以难以阐述两者关系
-
特征映射和感受野
在卷积神经网络中,对于某一层的任意元素x,其感受野(receptive field)是指在前向传播期间可能影响x计算的所有元素(来自所有先前层)。
例: 让我们用互相关运算中的图为例来解释感受野: 给定2×2卷积核,阴影输出元素值19的感受野是输入阴影部分的四个元素。 假设之前输出为Y,其大小为2×2,现在我们在其后附加一个卷积层,该卷积层以Y为输入,输出单个元素z。 在这种情况下,Y上的z的感受野包括Y的所有四个元素,而输入的感受野包括最初所有九个输入元素。 因此,当一个特征图中的任意元素需要检测更广区域的输入特征时,我们可以构建一个更深的网络 (特征图不是卷积核,而是经过卷积操作得到的输出)
3.填充(paddle)和步幅 (stride)
卷积的输出形状取决于输入形状和卷积核的形状
那还有什么因素影响输出的shape呢?
①填充 padding
当应用了连续的卷积后,我们得到的输出远小于输入的shape,如此一来原始图像的边界丢失了许多有用信息,而padding是解决此问题最有效的方法。
在输入图像的边界填充元素(通常为0),填充操作如下图所示:

通常,如果我们填充Ph行,则顶部与底部各填充 1/2 Ph行,填充 Pw列同理
填充后,输出公式如下:
这意味着输出的高度和宽度分别增加 Ph行和pw列
通常,若要保持输入的shape与经过卷积后的输出的shape一致,则需设置ph=Kh-1和pw=Kw-1。
- 若Kh为奇数,则在顶部与底部各填充 1/2 ph行,kw同理
- 若Kh为偶数,则在顶部或者底部填充 1/2 ph行,只需要填充一侧,kw同理
卷积神经网络的卷积核(kernel)的高度和宽度通常为奇数。
好处:
- 保持空间维度同时,可以同时在上下,左右填充相同数量的行(这里的相同数量指上下填充的行数相同,列数同理)
- 提供书写便利
代码示例:
我们创建一个 高度和宽度为3的二维卷积层,并在所有侧边填充1个像素。给定高度和宽度为8的输入,则输出的高度和宽度也是8。 即kh=hw=3,ph=pw=2,ph=kh-1,pw同理,所以输出shape不变
import torch
from torch import nn
def comp_conv2d(conv2d,X):
# 为了方便起见,我们定义了一个计算卷积层的函数。
# 此函数初始化卷积层权重,并对输入和输出提高和缩减相应的维数
#此处为元组相加,X.shape=(8,8)
#(1,1)+(8,8)=(1,1,8,8)
# 这里的(1,1)表示批量大小和通道数都是1
X=X.reshape((1,1)+X.shape)
Y=conv2d(X)#得到经过卷积的Y
return Y.reshape(Y.shape[2:])#将Y重新整合为2维矩阵并返回Y(因为这里的通道数,批量数为1,所以不影响)
# 请注意,这里每边都填充了1行或1列,因此总共添加了2行或2列
conv2d=nn.Conv2d(1,1,kernel_size=3,padding=1)
#conv2d的输入shape为(1,1,8,8),输出shape同样为(1,1,8,8)
X=torch.rand(size=(8,8))
cop_conv2d(conv2d,X).shape
result:
torch.Size([8, 8]) #表明输出的高宽为[8,8]
当kernel的高度与宽度不等时,可以填充不同的高度和宽度,使输出和输入具有相同的高度和宽度。 在如下示例中,我们使用高度为5,宽度为3的卷积核,高度和宽度两边的填充分别为2和1。
#padding为(2,1),即高度和宽度两边的填充行数列数分别为2和1,即4,2
conv2d = nn.Conv2d(1, 1, kernel_size=(5, 3), padding=(2, 1))
comp_conv2d(conv2d, X).shape
result:
torch.Size([8, 8])
②步幅 stride (向下取整)
计算互相关时,卷积窗口默认从左上角开始,向下、向右滑动。 卷积层默认每次滑动一个元素。
卷积窗口也可以跳过中间位置,每次滑动多个元素。每次滑动元素的数量称为 步幅(stride)。

下图为指定步幅的输出形状公式:

下面为输出形状简化:
①如果设置 ph=kh-1 和 pw=kw-1.则输出形状简化为 [(nh+sh−1)/sh]×[(nw+sw−1)/sw]。
②更进一步,如果 输入的高度和宽度可以被垂直和水平步幅整除,则输出形状为状将为(nh/sh)×(nw/sw) (因为向下取整, (sw-1)<1,则视为0)
下面,我们将高度和宽度的步幅设置为2,从而将输入的高度和宽度减半
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1, stride=2)
comp_conv2d(conv2d, X).shape
result:
torch.Size([4, 4])
接下来,看一个稍微复杂的例子
conv2d = nn.Conv2d(1, 1, kernel_size=(3, 5), padding=(0, 1), stride=(3, 4))
comp_conv2d(conv2d, X).shape
result:
torch.Size([2, 2])
输入高度和宽度两侧的填充数量分别为ph和pw时,我们称之为填充(ph,pw)。当ph=pw=p时,填充是p。同理,步幅为**(sh,sw)。当步幅为sh=sw=s时,步幅为s**。默认情况下,填充为0,步幅为1。在实践中,我们很少使用不一致的步幅或填充,也就是说,我们通常有ph=pw和sh=sw。
小结: stride 和padding可用于有效调整数据的维度 (w,h)
-
多输入多输出通道
前言:在前面我们的例子中,进行互相关运算的始终是二维的数据与卷积核。而大多数图片数据通常为 3维tensor(具有 R G B 3通道),shape为(3 X h X w),我们将这个大小为3的轴称为 通道(channel) 维度
本节我们将深入研究具有多输入 和多输出的kernel
-
多输入通道
当输入包含多个channel时,需要构造 相同channel 数的 kernel,便与进行互相关运算。
多输入通道数据**(3维tensor)** 与 多输入通道 kernel (3维tensor) 是如何进行互相关运算的?
首先 我们在每个输入通道 进行 kernel(2维tensor) 与 输入 tensor (2维tensor) 进行互相关运算,最后将 每个输入通道上的结果进行求和 得到 最终的 2维 tensor。这就是多通道输入与多输入通道 kernel 之间进行二维互相关运算的结果
下图,我们进行 运算演示:

为加深理解,我们进行代码复现。
在此之前,我们回顾一下 zip()函数
#zip()函数用于将可迭代的对象作为参数,将对象中对应的元素打包成一个个tuple,然后返回由这些tuple构成的list。如果各个迭代器的元素个数不一致,则返回的list长度与最短的list长度相同。同时,使用zip(*)号,可以将tuple解压为list
a='1111'
b='22222'
print(zip(a,b))
print(list(zip(a,b))
za,zb=zip(*zip(a,b))
print('za is {za},zb is {zb}'.format(za=za,zb=zb))
result:
<zip object at 0x000001F9CFEC6E80>
[('1','2'),('1','2'),('1','2'),('1','2')]#该结果证明了zip构成了元素为tuple的list
za is ('1','1','1','1'), zb is('2','2','2','2')
多输入通道互相关运算 简而言之就是对每个输入通道执行2维的互相关操作,然后将结果相加
import torch
from d2l import torch as d2l
def corr2d_multi_in(X,K):
# 先遍历“X”和“K”的第0个维度(通道维度),再把它们加在一起
#此处X,K为三维tensor x,y 为具有高宽的2维tensor(x,y)为list中的tuple
#sum 使得每个输入通道上的结果进行对应元素相加
return sum(d2l.corr2d(x,k) for x,k in zip(X,K))
我们可以构造与 图6.4.1 中的值相对应的输入张量X和核张量K,以验证互相关运算的输出。
X = torch.tensor([[[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]],
[[1.0, 2.0, 3.0], [4.0, 5.0, 6.0], [7.0, 8.0, 9.0]]])
K = torch.tensor([[[0.0, 1.0], [2.0, 3.0]], [[1.0, 2.0], [3.0, 4.0]]])
corr2d_multi_in(X, K)
result:
tensor([[ 56., 72.],
[104., 120.]])
-
多输出通道
到目前为止,我们的kernel只有一个输出通道,即输出为单通道的2维tensor。用 ci和co表示 输入和输出通道的数目,kh和kw为kernel的w和h。为获得多个channel的三维tensor ,我们在每个输出channel 创建一个形状为 ci X kh X kw 的三维kernel tensor ,相当于 卷积核的shape 为 co X ci X kh X kw(四维)。
在互相关运算中,每个输出通道先获取所有输入通道,再以对应该输出通道的三维 kernel 进行 多输入通道的计算,最后将多个2维tensor 进行某维度的连结形成新的3维tensor
def corr2d_multi_in_out(X,K):
#此时K为四维tensor,第0维为输出通道
return torch.stack([corr2d_multi_in(X,k) for k in K],0)
#解析:
#在每个输出通道上取出三维tensor-kernel然后进行 多输入通道计算,即在每个输入通道进行2维kernel与2维输入tensor进行互相关运算,最后用torch.stack(……,0)在第0维上进行2维tensor连接,得到新的多输入通道tensor(三维)
通过将核张量K与K+1(K中每个元素加1)和K+2连接起来,构造了一个具有3个输出通道的卷积核。
K = torch.stack((K, K + 1, K + 2), 0)
K.shape
result:
torch.Size([3, 2, 2, 2])
下面,我们对输入张量X与卷积核张量K执行互相关运算。现在的输出包含3个通道,第一个通道的结果与先前输入张量X和多输入单输出通道的结果一致。
corr2d_multi_in_out(X, K)
result:
tensor([[[ 56., 72.],
[104., 120.]],
[[ 76., 100.],
[148., 172.]],
[[ 96., 128.],
[192., 224.]]])
-
1 X 1 卷积层
前言:1 x 1 卷积层失去了卷积的特性:有效提取相邻像素间的相关特征。而1 X 1 卷积 的唯一计算发生在channel上
下图所示,1X1 卷积核 与多输入多输出通道的互相关计算的输出中的每个元素,实质是输入图像中同一位置的元素的线性组合(2维),最后连接维三维
如下图所示:

下面,我们使用全连接实现 1X 1 卷积。(因为 1X1 卷积操作 可以 化简为 全连接层 的操作)
def corr2d_multi_in_out_1x1(X,K):
c_i,h,w=X.shape
c_o=K.shape[0]
X=X.reshape((c_i,h*w)) #整合为2维tensor
K=K.reshape((c_o,c_i)) #整合为2维tensor
#下面是用的是全连接层的矩阵乘法
Y=torch.matmul(K,X) #全连接层的计算相当于 1X1的多输入输出通道的卷积层运算 1x1卷积核实质上不存在
return Y.reshape((c_o,h,w))
当执行1×1卷积运算时,上述函数相当于先前实现的互相关函数corr2d_multi_in_out。让我们用一些样本数据来验证这一点。
X = torch.normal(0, 1, (3, 3, 3))
K = torch.normal(0, 1, (2, 3, 1, 1))
Y1 = corr2d_multi_in_out_1x1(X, K)
Y2 = corr2d_multi_in_out(X, K)
assert float(torch.abs(Y1 - Y2).sum()) < 1e-6
5.汇聚层
前言:
①处理图像时,我们希望逐渐降低隐藏表示的空间分辨率(即 w,h) 同时 汇聚信息。
②我们学习任务通常与全局图像问题有关(例:图像是否包含一只猫),所以最后一层应该对最初的整个输入具有全局敏感性。通过逐步聚合信息,生成越发粗糙的映射,最终实现学习全局表示的目标,同时将卷积涂层的又是保留在中间层。
③当检测较底层特征时,我们希望**这些特征保持某种程度上的平移不变性。**若因为像素的短距离移动导致新图像的输出大不相同,则模型的稳定性过于差劲。所以我们采取汇聚层( pooling)
优点:1. 可以降低卷积层对位置的敏感性
2.可以降低对空间降采样表示的敏感性
-
最大汇聚层(maximum pooling)和平均汇聚层(average pooling)
与 卷积窗口类似,pooling同样存在汇聚窗口。汇聚窗口的移动与kernel 一样,但**操作区别是:**汇聚窗口计算每个窗口中tensor最大的元素值或者平均值,将该值作为新元素。
操作如下图所示:

汇聚窗口形状为p×q的汇聚层称为p×q汇聚层,汇聚操作称为p×q汇聚。
可以看出,即使输入数据在高度或宽度上移动一个元素,卷积层仍能识别到模式。
在下面的pool2d的函数中,我们实现pooling的前向传播。
注意:pooling不具有卷积核,汇聚窗口是虚拟,用于表达的媒介
import torch
from torch import nn
from d2l ipmort torch as d2l
def pool2d(X,pool_size,mode='max'):
p_h,p_w=pool_size
Y=torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
Y = torch.zeros((X.shape[0] - p_h + 1, X.shape[1] - p_w + 1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
if mode == 'max':
Y[i, j] = X[i: i + p_h, j: j + p_w].max()
elif mode == 'avg':
Y[i, j] = X[i: i + p_h, j: j + p_w].mean()
return Y
我们可以构建 上图中的输入张量X,验证二维最大汇聚层的输出。
X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]])
pool2d(X, (2, 2))
result:
tensor([[4., 5.],
[7., 8.]])
此外,我们还可以验证平均汇聚层。
pool2d(X, (2, 2), 'avg')
result:
tensor([[2., 3.],
[5., 6.]])
-
填充(padding)与 步幅 (stride)
前言:
与卷积层一样,pooling 也可以改变输出形状(是 h,w 不是通道) 。两者操作与卷积层操作一样,不再做阐述 (向下取整)
我们直接看下面例子:
们首先构造了一个输入张量X,它有四个维度,其中样本数和通道数都是1。
X = torch.arange(16, dtype=torch.float32).reshape((1, 1, 4, 4))
X
result:
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]]]])
默认情况下,深度学习框架中的步幅与汇聚窗口的大小相同。 因此,如果我们使用形状为(3, 3)的汇聚窗口,那么默认情况下,我们得到的步幅形状为(3, 3)。
是 nn.Maxpool2d() or nn.avePool2d() 的stride=kernel的size,而不是 nn.Conv2d()
pool2d = nn.MaxPool2d(3) # 3代表汇聚窗口大小为3,同样stride=3
pool2d(X)
result:
tensor([[[[10.]]]])
填充和步幅可以手动设定。
pool2d = nn.MaxPool2d(3, padding=1, stride=2) #汇聚窗口为3,填充为2,步长为2
pool2d(X)
result:
tensor([[[[ 5., 7.],
[13., 15.]]]])
当然,我们可以设定一个任意大小的矩形汇聚窗口,并分别设定填充和步幅的高度和宽度。
pool2d = nn.MaxPool2d((2, 3), stride=(2, 3), padding=(0, 1))
pool2d(X)
result:
tensor([[[[ 5., 7.],
[13., 15.]]]])
-
多个通道
在处理多通道输入数据时,汇聚层在每个输入通道上单独运算,而不是像卷积层一样在通道上对输入进行汇总。 这意味着汇聚层的输出通道数与输入通道数相同。 下面,我们将在通道维度上连结张量X和X + 1,以构建具有2个通道的输入。
X = torch.cat((X, X + 1), 1) #在第1维上进行连结,没有扩展维度
X
#shape为 (1,2,4,4)
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[ 1., 2., 3., 4.],
[ 5., 6., 7., 8.],
[ 9., 10., 11., 12.],
[13., 14., 15., 16.]]]])
如下所示,汇聚后输出通道的数量仍然是2。
pool2d = nn.MaxPool2d(3, padding=1, stride=2)
pool2d(X)
tensor([[[[ 5., 7.],
[13., 15.]],
[[ 6., 8.],
[14., 16.]]]])
6.卷积神经网络 (LeNet)
前言:
通过前面几节,我们学习了构造一个完整卷积神经网络所需要的组件。回想一下,在MLP中进行了分类问题,我们将大小为 28 X 28 的图片reshape 为 向量,从而用 全连接层进行了处理。
现在,我们学习了卷积神经网络:
它的好处是:①可以充分利用空间结构的特性
②卷积层模型更简洁、所需参数更少
本节我们介绍最早发布的卷积神经网络之一:LeNet
-
LeNet
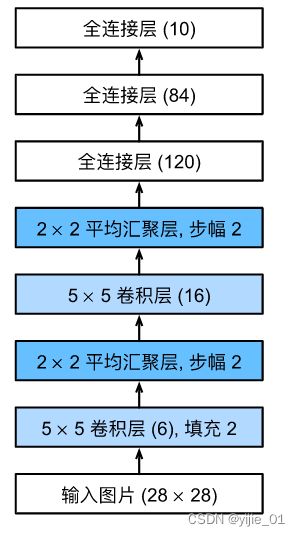
总体来看,LeNet 由两部分组成:
- 卷积编码器:有两个卷积层组成
- 全连接层密集块:由三个全连接层组成
该架构如下图所示

每个卷积块基本单元是一个卷积层、一个sigmoid激活函数和 average pooling,注意,在LeNet诞生时 ReLU函数并未出现,所以这里的激活函数为 sigmoid。
注意:卷积的输出形状为四维(批量大小、通道数、高度、宽度),为了将卷积块的输出传递给稠密块(即这里的三个全连接层),我们需要将这个四维输入reshape为 二维输入,即在小批量中展平每个样本。这里的二维输入中的第一个维度为小批量中的样本数,第二个维度为每个样本的平面向量表示。LeNet的稠密块 有三个全连接层,分别具有120、84、10个输出,因为我们在执行分类任务,所以输出层的10维对应于最后输出结果的数量。
如下图所示,我们会用代码实现该架构:
我们只需要实例化一个 Sequential 块将所需要的层来连接在一起
import torch
from torch import nn
from d2l import torch as d2l
#接下来我会详细展示后两维(h,w)的变化
#注意 kernel的四维为(in,out,h,w) 输入数据的四维为 (批量,in,h,w)
#为了讲解,我假设输入的X shape为 (1,1,28,28) 即一个批量,一个输入通道,高宽为28
net=nn.Sequential(
# 28+2*2+1-5=28 即该卷积输出为 (1,6,28,28)
nn.Conv2d(1,6,kernel_size=5,padding=2),nn.Sigmoid(),
# pooling层输出数据的输入通道=输入数据的输入通道, (28+2-2)/2=14 即 输出的 shape 为(1,6,14,14)
nn.AvgPool2d(kernel_size=2,stride=2),
# 14-5+1=10 即该卷积层输出数据的shape 为 (1,16,10,10)
nn,Conv2d(6,16,kerel_size=5),nn.Sigmoid(),
# (10-2+2)/2=5 即 输出的shape 为 (1,16,5,5)
nn.AvgPool2d(kernel_size=2,stride=2),
#因为是输入从卷积块到稠密块,而全连接层只接受2维数据,所以nn.Flatten进行输入数据的展平. 第0维代表样本数,第1维代表一个样本的所有特征数
nn.Flatten(),
#展平后输入 shape为 (1,16*5*5),所以Linear的权重 shape为 (16*5*5,120)
#特征维度从16*5*5下降到120,样本数 即输出数据第0维大小不变 shape为(1,120)
nn.Linear(16*5*5,120),nn.Sigmoid(),
# 权重shape 为(120,84) 输出shape为 (1,84)
nn.Linear(120,84),nn.Sigmoid(),
# 权重shape 为(84,10) 输出shape为 (1,10),即一个样本对应十种分类
nn.Linear(84,10))
下面,我们将一个大小为28×28的单通道(黑白)图像通过LeNet。通过在每一层打印输出的形状,我们可以检查模型,以确保其操作与我们期望的 下图一致。
X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32)
for layer in net:
X = layer(X)
print(layer.__class__.__name__,'output shape: \t',X.shape)
result:
Conv2d output shape: torch.Size([1, 6, 28, 28])
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
该结果证明了我们之前的分析!
-
模型训练
我们已经实现了LeNet,接下来我们看看Lenet在Fashion-MNIST数据集上的表现
batch_size=256
train_iter,test_iter=d2l.load_data_fashion_mnist(batch_size=batch_size)
为进行评估,我们实现如下函数(需要将数据集从内存复制到显存中) 用于测试集
def evaluate_accuracy_gpu(net, data_iter, device=None): #@save
"""使用GPU计算模型在数据集上的精度"""
if isinstance(net, nn.Module):
net.eval() # 设置为评估模式
if not device:
#如果未指定device 则将 模型所在的device 赋值给为None的device
device = next(iter(net.parameters())).device
# 正确预测的数量,总预测的数量
metric = d2l.Accumulator(2)
with torch.no_grad():
for X, y in data_iter:
if isinstance(X, list):
#如果输入数据X 为list,就将X中的所有元素依次复制到 device
# BERT微调所需的(之后将介绍)
X = [x.to(device) for x in X]
else:
#如果X不为list,则直接将X整体复制到device
X = X.to(device)
y = y.to(device)
# 正确预测的数量,总预测的数量
metric.add(d2l.accuracy(net(X), y), y.numel())
return metric[0] / metric[1] #返回该批量的准确精度
接下来,我们实现训练函数 train_ch6, 对于模型参数 我们将使用 Xavier 随机初始化方法。与全连接层一样,我们使用交叉熵损失函数和小批量随机梯度下降
def train_ch6(net,train_iter,test_iter,num_epochs,device):
#使用GPU训练
#定义模型参数的Xavier 初始化方法
def init_weight(m):
if type(m)==nn.Linear or type(m)==nn.Conv2d:
nn.init.xavier_uniform_(m.weight)
net.apply(init_weight)#进行模型参数初始化
print('training on',device)
#将模型整体(包括模型参数,计算的中间结果等)复制到device上进行计算
net.to(device)
#初始化优化器
optimizer= torch.optim.SGD(net.parameters(),lr=lr)
#指定损失函数,该损失函数进行了 softmax 操作,使得模型最终输出得到了规范化
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)#num_batches为批量样本数
for epoch in range(num_epochs):
# 训练损失之和,训练准确率之和,样本数
metric = d2l.Accumulator(3)
net.train()#设为训练模式
for i,(X,y) in enumerate(train_iter):
#i为自然数索引,X为批量输入数据,y为批量的正确标签
timer.start()
optimizer.zero.grad()#模型参数梯度清零
X,y=X.to(device),y.to(device)
y_hat=net(X)#得到预测标签
l=loss(y_hat,y)
l.backward()#损失函数关于模型参数进行求梯度(求偏导)
optimizer.step()#权重更新,即卷积核权重
with torch.no_grad():
#训练损失之和,训练准确率之和,样本数
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]#每个epoch的损失精度
train_acc = metric[1] / metric[2]#每个epoch的正确精度
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
#得到每个epoch后模型的预测正确精度
test_acc = evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {train_l:.3f}, train acc {train_acc:.3f}, '
f'test acc {test_acc:.3f}')
print(f'{metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {str(device)}')
lr, num_epochs = 0.9, 10
train_ch6(net, train_iter, test_iter, num_epochs, lr, d2l.try_gpu())
result:
loss 0.488, train acc 0.815, test acc 0.777
47229.5 examples/sec on cuda:0
