基于51单片机的红外摇头小风扇
文章目录
- 实验准备
- 硬件原理及实现
-
- 舵机控制
-
- 原理
- 程序设计
- 直流电机转速控制
-
- 原理
- 程序设计
- NEC红外解码
-
- 原理
- 程序设计
- 蜂鸣器短暂发声
-
- 原理
- 程序设计
- 红外摇头小风扇程序
- 实物效果图
- 实验心得
实验准备
本实验基于51单片机控制小风扇,在软件keil5上编写程序。需要使用到的元件有51单片机、直流电机、舵机、红外遥控器、杜邦线、蜂鸣器、数码管。需要完成NEC红外遥控器解码、舵机转动控制、电机转速控制、蜂鸣器发声四部分程序的编写,最后将这四部分合并再将相应元件组装,完成一个基于51单片机的红外摇头小风扇的设计。同时能够在数码管显示直流电机转速的档位,一个有0~10这一个档位,0就是停止,10最大。
硬件原理及实现
舵机控制
原理
舵机是由直流电机、减速齿轮组、传感器和控制电路组成的一套自动控制系统。通过发送信号,指定输出轴旋转角度。舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。以180度角度伺服为例,那么对应的控制关系是这样的:0.5ms--------------0度; 1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度; 2.5ms-----------180度。舵机上有三根线,红黄褐三种颜色,褐色线为舵机信号线,通过给信息线提供不同的电信号来控制舵机转过不同的角度。
舵机的PWM信号频率改变一定要有延时,要给舵机足够的时间转到指定的角度后才能改变PWM频率。
程序设计
使用51单片机的定时器2控制中断
#include直流电机转速控制
原理
在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并且根据需要改变一个周期内“接通”和“断开”时间的长短。通过改变直流电机电枢上电压的“占空比”来达到改变平均电压大小的目的,从而来控制电动机的转速。
如图1所示:
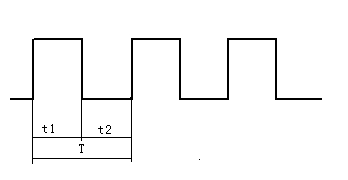
图1 PWM信号的占空比
设电机始终接通电源时,电机转速最大为Vmax,设占空比为D= t1 / T,则电机的平均速度为Va = Vmax * D,其中Va指的是电机的平均速度;Vmax 是指电机在全通电时的最大速度;D = t1 / T是指占空比。由上面的公式可见,当我们改变占空比D=t1/T时,就可以得到不同的电机平均速度Vd,从而达到调速的目的。严格来说,平均速度Vd与占空比D并非严格的线性关系,但是在一般的应用中,我们可以将其近似的看成是线性关系。所以,我们通过改变高电平持续的时间来进行直流电机调速。
程序设计
使用51单片机的定时器0来控制中断
#includeNEC红外解码
原理
NEC 协议使用38 kHz 载波频率,其数据格式包括了引导码、用户码、用户码(或者用户码反码)、按键键码和键码反码,最后一个停止位。停止位主要起隔离作用,一般不进行判断。其中数据编码总共是 4 个字节 32 位,如图 2 所示。第一个字节是用户码,第二个字节可能也是用户码,或者是用户码的反码,具体由生产商决定,第三个字节就是当前按键的键数据码,而第四个字节是键数据码的反码,可用于对数据的纠错。

图 2 NEC 协议数据格式
• 引导码:9ms 的载波+4.5ms 的空闲。
• 比特值“0”:560us 的载波+560us 的空闲。
• 比特值“1”:560us 的载波+1.68ms 的空闲。
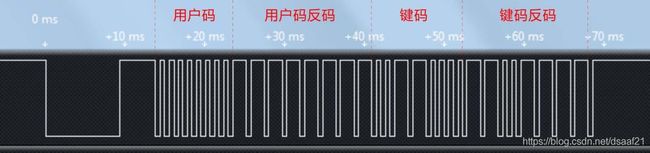
如上图所示,当一体化接收头收到38kHz红外信号时,载波为低电平,空闲为高电平
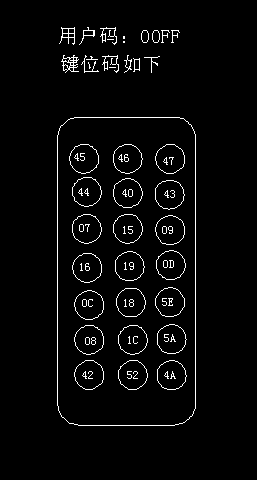
NEC红外遥控器键值码如下图所示:
程序设计
使用51单片机的使用定时器1控制中断
#include蜂鸣器短暂发声
原理
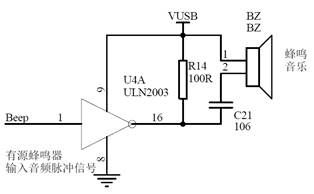
无源蜂鸣器只需改变Beep端口的电平,产生一个周期性的方波即可使蜂鸣器发生声音,不同的频率发出的声音不同。其中,ULN2003是一个功放,用于放大电流。电阻R14和电容C21是用来保护电路的。若人为将Beep端口的电平一直置为高电平,在没有保护电路的情况下,容易烧毁电路,但即使有保护电路也应该注意不要将Beep端口长时间置于高电平,这对器件也是有一定损害的。
程序设计
#include 红外摇头小风扇程序
github代码链接
实物效果图
实验心得
舵机和直流电机都是通过PWM信号控制,舵机利用PWM信号转动到指定的角度,而直流电机利用PWM信号进行调速。舵机的PWM信号频率改变一定要有延时,要给舵机足够的时间转到指定的角度后才能改变PWM频率。在程序运行时,各个定时器,各部分中断都是独立运行的,互不干扰,红外遥控解码就是利用中断INT2和定时器同时独立运行实现解码。蜂鸣器因为只要短暂发声,所以不需要使用定时器来定时,利用循环,循环次数增多,一次循环实现beep信号的一个周期性变化,这样就能完成短暂发声。在实验过程中,我发现当LED灯数码管同时亮时,LED灯的亮度要比只有LED灯亮时要暗,所以我要LED灯交替到数码管亮时的延迟增加,这样就能让LED灯数码管同时亮时LED灯更亮。原理是通过增加LED灯交替到数码管亮时的延迟,改变脉冲的高电平的时间,即LED的导通时间,这样改变了接入到LED灯周期信号的占空比,就改变了LED灯的亮度