基于QT&C++的线激光标定+测距模型
基于QT&C++,参考CSDN大神发帖,做了一套线激光标定+测距模型。直接上代码,可参考注释自由复制粘贴。
原理方面,主要应用线激光刀面的几何约束,并应用ransac方法优化标定线激光点的拟合平面。
硬件方面:图便宜采用了可见650nm的红色线激光和USB免驱摄像头,具体可根据自己需求自行选择。标定纸可自行打印。
特别感谢这两篇帖子给我的启发:
一文了解单线激光扫描系统的标定与成像原理_天琴lyra的博客-CSDN博客_线激光标定
张正友相机标定法原理与实现_Eating Lee的博客-CSDN博客_张正友标定法原理
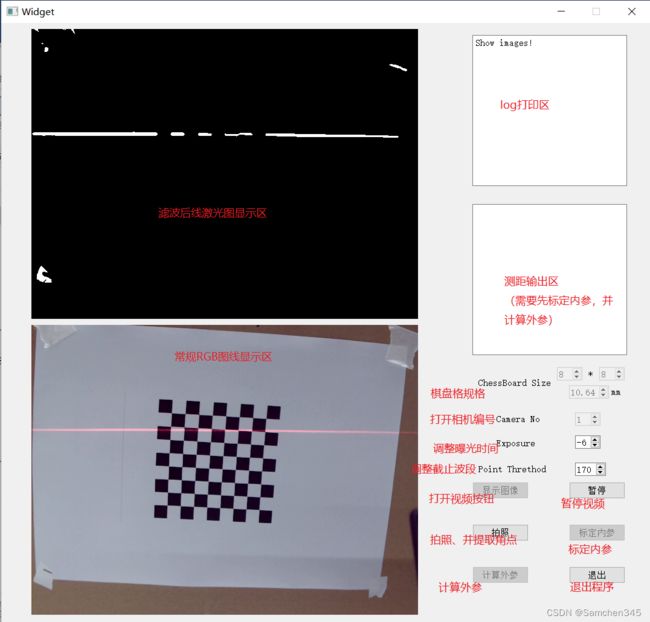
界面如下。
widget.h
#ifndef WIDGET_H
#define WIDGET_H
#include
#include "opencv2/opencv.hpp"
#include "opencv2/highgui.hpp"
#include
#include
#include "opencv2/imgproc/types_c.h"
#include "qt_windows.h"
using namespace std;
using namespace cv;
namespace Ui {
class Widget;
}
class Widget : public QWidget
{
Q_OBJECT
public:
explicit Widget(QWidget *parent = nullptr);
~Widget();
public slots:
void readFarme();
private slots:
void on_pushButton_clicked();
void on_pushButton_2_clicked();
void on_pushButton_4_clicked();
void on_pushButton_3_clicked();
void on_pushButton_5_clicked();
void on_pushButton_6_clicked();
void on_spinBox_valueChanged(int arg1);
void on_spinBox_2_valueChanged(int arg1);
void on_doubleSpinBox_2_valueChanged(double arg1);
void on_spinBox_3_valueChanged(int arg1);
void on_spinBox_4_valueChanged(int arg1);
void on_spinBox_5_valueChanged(int arg1);
private:
Ui::Widget *ui;
QTimer *timer;
Mat srcImge,OperImage,RGBIntrMat, RGBDistCoeff;
VideoCapture *videocap;
vector channels,RgbMatVec,GrayMatVec,GrayMatVecUndis,RGBRotVec, RGBTranVec,realworld;
vector count;
vector> RGBcornerV;
vector> realCornerV;
Size chessSize = Size(9, 13);
float gridLength = 18; //unit mm
Size RGBcamResolution = Size(640, 480); //resolution of color RGB camera
int imgAmount=0,pn=0; //the images used to calibrate
int expo=-6,pointthre=170,camerano=1;
double PA=0.0, PB, PC, PD;
bool Caldoneflag=false;
};
#endif // WIDGET_H
main.cpp
#include "widget.h"
#include
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
Widget w;
w.show();
return a.exec();
} widget.cpp
#include "widget.h"
#include "ui_widget.h"
#include
#define _USE_MATH_DEFINES
#include
#include
#include
#include
#include
#include
#include
#include
Widget::Widget(QWidget *parent) :
QWidget(parent),
ui(new Ui::Widget)
{
ui->setupUi(this);
timer = new QTimer(this);
connect(timer, SIGNAL(timeout()), this, SLOT(readFarme()));
ui->pushButton_2->setEnabled(false);
ui->pushButton_5->setEnabled(false);
ui->pushButton_6->setEnabled(false);
}
void Widget::readFarme()
{
videocap = new cv::VideoCapture(camerano);// Get the camera.
videocap->set(cv::CAP_PROP_EXPOSURE,expo);
videocap->read(srcImge);//Get one frame.
cvtColor(srcImge,srcImge,COLOR_BGR2RGB);
cv::GaussianBlur(srcImge, OperImage,cvSize(5, 5),0, 0 );//GaussianBlur.
split(OperImage,channels);//Separate the channels,and value the variety.
OperImage=channels.at(0);//0 for red(RGB).
cv::threshold(OperImage,OperImage, pointthre, 255, 0);//The third number is the threthod, value smaller than the threthod shall be 0.
//Canny(OperImage,OperImage,50,200,3);//Get the edge,restored.
if(!Caldoneflag)//Show the original images.
{
QImage image1=QImage((const unsigned char*)srcImge.data,srcImge.cols,srcImge.rows,QImage::Format_RGB888);
ui->label_2->setPixmap(QPixmap::fromImage(image1));
for(int j=0;jlabel->setPixmap(QPixmap::fromImage(image2));
}
else //Show the undistorted images.
{
Mat rr,gg;
cv::undistort(srcImge, rr, RGBIntrMat, RGBDistCoeff);
cv::undistort(OperImage, gg, RGBIntrMat, RGBDistCoeff);
for(int j=0;jlabel_2->setPixmap(QPixmap::fromImage(image1));
QImage image2=QImage((const unsigned char*)gg.data,gg.cols,gg.rows,QImage::Format_Grayscale8);
ui->label->setPixmap(QPixmap::fromImage(image2));
if(PA!=0) //Calculate and show the distance if the extrinsticts are get.
{
double compare=10000;
for(int j=0;j(3, 1) << k, j, 1);
Mat cccc=RGBIntrMat.inv()*ii;
double cx=cccc.at(0,0);
double cy=cccc.at(1,0);
double curpointdis=-PD/(PA*cx+PB*cy+PC);
if (curpointdistextBrowser_2->append("Out of range!Adjust the device!");
ui->textBrowser_2->moveCursor(QTextCursor::End);
}
else
{
ui->textBrowser_2->append("Current distance is : "+QString::number(compare));
ui->textBrowser_2->moveCursor(QTextCursor::End);
}
}
}
}
Widget::~Widget()
{
videocap->release();
delete ui;
}
void Widget::on_pushButton_clicked()//Start the timer.
{
QMessageBox msg(this);
msg.setWindowTitle("Window Title");
msg.setText("Chessboard type is "+QString::number(chessSize.width)+" * "+QString::number(chessSize.height)+"\n"+
"Chessboard type is "+QString::number(gridLength)+" mm"+"\n"+
"Camera opened is No:"+QString::number(camerano)+"\n");
msg.setIcon(QMessageBox::Information);//Set the icon type.
msg.setStandardButtons(QMessageBox::Ok | QMessageBox:: Cancel);//Button settings.
if((msg.exec() == QMessageBox::Ok))//Module callback.
{
ui->textBrowser->append("Show images!");
ui->textBrowser->moveCursor(QTextCursor::End);
timer->start(100);
ui->spinBox->setEnabled(false);
ui->spinBox_2->setEnabled(false);
ui->spinBox_5->setEnabled(false);
ui->doubleSpinBox_2->setEnabled(false);
ui->pushButton->setEnabled(false);
ui->pushButton_2->setEnabled(true);
}
}
void Widget::on_pushButton_2_clicked()//Stop the timer.
{
timer->stop();
ui->textBrowser->append("Paused!");
ui->textBrowser->moveCursor(QTextCursor::End);
ui->pushButton_2->setEnabled(false);
ui->pushButton->setEnabled(true);
}
void Widget::on_pushButton_3_clicked()//Shut the widget.
{
Widget::~Widget();
}
void Widget::on_pushButton_4_clicked()//Capture the images if the corners can be found.
{
mkdir("saveData");
vector RGBcorner;
vector realCorner;
for (int i = 0; i < chessSize.height; i++)
{
for (int k = 0; k < chessSize.width; k++)
{
realCorner.push_back(Point3f(k*gridLength, i*gridLength, 0));
}
}
Mat RGBgrayImg=srcImge;
cvtColor(RGBgrayImg, RGBgrayImg, CV_BGR2GRAY);
bool findRGBCorner = cv::findChessboardCorners(RGBgrayImg, chessSize, RGBcorner,
cv::CALIB_CB_ADAPTIVE_THRESH + cv::CALIB_CB_NORMALIZE_IMAGE);
if(findRGBCorner)
{
RgbMatVec.push_back(srcImge.clone());//Save RGB&GRAY images and show.
string rgbFileName="./saveData/rgb("+std::to_string(imgAmount)+").jpg";
cvtColor(srcImge,srcImge,COLOR_BGR2RGB);
imwrite(rgbFileName,srcImge);
ui->textBrowser->moveCursor(QTextCursor::End);
GrayMatVec.push_back(OperImage.clone());
string grayFileName="./saveData/gray("+std::to_string(imgAmount)+").jpg";
imwrite(grayFileName,OperImage);
ui->textBrowser->append("NO "+QString::number(imgAmount+1)+" image's corners are found and captured!");
ui->textBrowser->moveCursor(QTextCursor::End);
cornerSubPix(RGBgrayImg, RGBcorner, cv::Size(5, 5), cv::Size(-1, -1), //Optimize the corners.
cv::TermCriteria(CV_TERMCRIT_ITER | CV_TERMCRIT_EPS, 1000, 0.0001));
RGBcornerV.push_back(RGBcorner);
realCornerV.push_back(realCorner);
imgAmount++;//Show the right if images > 6.
if(imgAmount>6)
{
ui->pushButton_5->setEnabled(true);
ui->textBrowser->append("You can calibrate now!");
ui->textBrowser->moveCursor(QTextCursor::End);
}
waitKey(500);
}
else if(!findRGBCorner)//Warn if cannot find the images' corners.
{
ui->textBrowser->append("No corners are found, images captured failed!");
ui->textBrowser->moveCursor(QTextCursor::End);
}
}
void Widget::on_pushButton_5_clicked() //Start to Calibrate and get the intrinsics.
{
ui->pushButton_4->setEnabled(false);
ui->pushButton_5->setEnabled(false);
calibrateCamera(realCornerV, RGBcornerV, RGBcamResolution, RGBIntrMat, RGBDistCoeff, RGBRotVec, RGBTranVec, 0);
stringstream ri,disco;
ri<textBrowser->append("RGB camera Intrinsics are:"+QString::fromStdString(ri.str()));
ui->textBrowser->append("RGB camera distCoeffs are:"+QString::fromStdString(disco.str()));
ui->textBrowser->append("You can calculate the Extrinsics!");
ui->textBrowser->moveCursor(QTextCursor::End);
ui->pushButton_6->setEnabled(true);
}
void Widget::on_pushButton_6_clicked() //Calculate the Extrinsics.
{
ui->textBrowser->append("Staring to extract 3D point!");
ui->textBrowser->moveCursor(QTextCursor::End);
for(int i=0;i(0,2);
b=temp.at(1,2);
c=temp.at(2,2);
Mat n=(cv::Mat_(1, 3) << a, b, c);
Mat D=n*RGBTranVec[i];
double d=-1*D.at(0,0);
vector realv;
for(int j=0;j(3, 1) << k, j, 1);//Core scentence.
Mat cccc=RGBIntrMat.inv()*ii;
double cx=cccc.at(0,0);
double cy=cccc.at(1,0);
Point3f real;
real.x = -d/(a*cx+b*cy+c)*cx,
real.y = -d/(a*cx+b*cy+c)*cy,
real.z = -d/(a*cx+b*cy+c);
realv.push_back(real);
pn++;
}
}
realworld.push_back(realv);
ui->textBrowser->append("Finish No "+QString::number(i+1)+" image's checking!");
ui->textBrowser->moveCursor(QTextCursor::End);
}
ui->textBrowser->append("Points amount is "+QString::number(pn));
//Ransac method for fitting the plane.
int size_old = 3;
double para = size_old/pn;
vector pts_3d;
for(int i=0;i index;
for (int k=0; k<3;k++)
{
index.push_back(rand()%imgAmount);
}
auto idx = index.begin();
int a=rand()%realworld[*idx].size();
double x1 = realworld[*idx].at(a).x, y1 = realworld[*idx].at(a).y, z1 = realworld[*idx].at(a).z;
++idx;
int b=rand()%realworld[*idx].size();
double x2 = realworld[*idx].at(b).x, y2 = realworld[*idx].at(b).y, z2 = realworld[*idx].at(b).z;
++idx;
int c=rand()%realworld[*idx].size();
double x3 = realworld[*idx].at(c).x, y3 = realworld[*idx].at(c).y, z3 = realworld[*idx].at(c).z;
PA = (y2 - y1)*(z3 - z1) - (z2 - z1)*(y3 - y1);
PB = (z2 - z1)*(x3 - x1) - (x2 - x1)*(z3 - z1);
PC = (x2 - x1)*(y3 - y1) - (y2 - y1)*(x3 - x1);
PD = -(PA*x1 + PB*y1 + PC*z1);
for (auto iter = pts_3d.begin(); iter != pts_3d.end(); ++iter)
{
double dis = fabs(PA*iter->x + PB*iter->y + PC*iter->z + PD) / sqrt(PA*PA + PB*PB + PC*PC);//点到平面的距离公式
if (dis < limit)
index.push_back(iter - pts_3d.begin());
}
//Update the group.
if (index.size() > size_old)
{
size_old = index.size();
}
index.clear();
}
cout << PA << " " << PB << " " << PC << " " << PD << endl;
cout << "Points Total account is: "<< pn <textBrowser->append("Parameter A is "+QString::number(PA));
ui->textBrowser->append("Parameter B is "+QString::number(PB));
ui->textBrowser->append("Parameter C is "+QString::number(PC));
ui->textBrowser->append("Parameter D is "+QString::number(PD));
ui->textBrowser->moveCursor(QTextCursor::End);
realworld.clear();
pn=0;
Caldoneflag=true;
}
void Widget::on_spinBox_valueChanged(int arg1)
{
ui->textBrowser->append("ChessBoard Row account is "+QString::number(arg1));
ui->textBrowser->moveCursor(QTextCursor::End);
chessSize.width=arg1;
}
void Widget::on_spinBox_2_valueChanged(int arg1)
{
ui->textBrowser->append("ChessBoard Column account is "+QString::number(arg1));
ui->textBrowser->moveCursor(QTextCursor::End);
chessSize.height=arg1;
}
void Widget::on_doubleSpinBox_2_valueChanged(double arg1)
{
ui->textBrowser->append("ChessBoard Column size is "+QString::number(arg1));
ui->textBrowser->moveCursor(QTextCursor::End);
gridLength=arg1;
}
void Widget::on_spinBox_3_valueChanged(int arg1)
{
ui->textBrowser->append("Exposure time value is "+QString::number(arg1));
ui->textBrowser->moveCursor(QTextCursor::End);
expo=arg1;
}
void Widget::on_spinBox_4_valueChanged(int arg1)
{
ui->textBrowser->append("Point lower threthod is "+QString::number(arg1));
ui->textBrowser->moveCursor(QTextCursor::End);
pointthre=arg1;
}
void Widget::on_spinBox_5_valueChanged(int arg1)
{
ui->textBrowser->append("Camera opened is "+QString::number(arg1));
ui->textBrowser->moveCursor(QTextCursor::End);
camerano=arg1;
}