【从零开始学习深度学习】31. 卷积神经网络之残差网络(ResNet)介绍及其Pytorch实现
和之前介绍的批量归一化层作用类似,残差网络(ResNet)提出的主要目的也是为了优化深度神经网络中数值稳定性问题。
1. 残差块介绍
假设输入为 x \boldsymbol{x} x,希望学出的理想映射为 f ( x ) f(\boldsymbol{x}) f(x)。下图左右为普通网络结构与加入残差连接的网络对比。右侧是ResNet残差网络的基础块,即残差块(residual block)。在残差块中,输入可通过跨层的数据线路更快地向前传播。
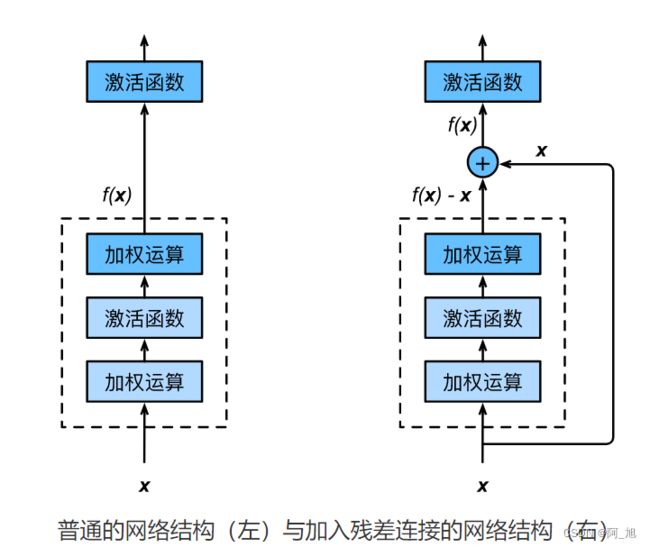
ResNet网络沿用了VGG全 3 × 3 3\times 3 3×3卷积层的设计。残差块里首先有2个有相同输出通道数的 3 × 3 3\times 3 3×3卷积层。每个卷积层后接一个批量归一化层和ReLU激活函数。然后我们将输入跳过这两个卷积运算后直接加在最后的ReLU激活函数前。这样的设计要求两个卷积层的输出与输入形状一样,从而可以相加。如果想改变通道数,就需要引入一个额外的 1 × 1 1\times 1 1×1卷积层来将输入变换成需要的形状后再做相加运算。
残差块的实现如下。它可以设定输出通道数、是否使用额外的 1 × 1 1\times 1 1×1卷积层来修改通道数以及卷积层的步幅。
import time
import torch
from torch import nn, optim
import torch.nn.functional as F
import sys
import d2lzh_pytorch as d2l
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
class Residual(nn.Module):
def __init__(self, in_channels, out_channels, use_1x1conv=False, stride=1):
super(Residual, self).__init__()
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, padding=1, stride=stride)
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=stride)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(out_channels)
self.bn2 = nn.BatchNorm2d(out_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
return F.relu(Y + X)
下面我们来查看输入和输出形状一致的情况。
blk = Residual(3, 3)
X = torch.rand((4, 3, 6, 6))
blk(X).shape # torch.Size([4, 3, 6, 6])
我们也可以在增加输出通道数的同时减半输出的高和宽。
blk = Residual(3, 6, use_1x1conv=True, stride=2)
blk(X).shape # torch.Size([4, 6, 3, 3])
2. 构建ResNet残差模型
ResNet的前两层跟之前介绍的GoogLeNet中的一样:在输出通道数为64、步幅为2的 7 × 7 7\times 7 7×7卷积层后接步幅为2的 3 × 3 3\times 3 3×3的最大池化层。不同之处在于ResNet每个卷积层后增加的批量归一化层。
net = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
GoogLeNet在后面接了4个由Inception块组成的模块。ResNet则使用4个由残差块组成的模块,每个模块使用若干个同样输出通道数的残差块。第一个模块的通道数同输入通道数一致。由于之前已经使用了步幅为2的最大池化层,所以无须减小高和宽。之后的每个模块在第一个残差块里将上一个模块的通道数翻倍,并将高和宽减半。
下面我们来实现这个模块。注意,这里对第一个模块做了特别处理。
def resnet_block(in_channels, out_channels, num_residuals, first_block=False):
if first_block:
assert in_channels == out_channels # 第一个模块的通道数同输入通道数一致
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(in_channels, out_channels, use_1x1conv=True, stride=2))
else:
blk.append(Residual(out_channels, out_channels))
return nn.Sequential(*blk)
接着我们为ResNet加入所有残差块。这里每个模块使用两个残差块。
net.add_module("resnet_block1", resnet_block(64, 64, 2, first_block=True))
net.add_module("resnet_block2", resnet_block(64, 128, 2))
net.add_module("resnet_block3", resnet_block(128, 256, 2))
net.add_module("resnet_block4", resnet_block(256, 512, 2))
最后,与GoogLeNet一样,加入全局平均池化层后接上全连接层输出。
net.add_module("global_avg_pool", d2l.GlobalAvgPool2d()) # GlobalAvgPool2d的输出: (Batch, 512, 1, 1)
net.add_module("fc", nn.Sequential(d2l.FlattenLayer(), nn.Linear(512, 10)))
这里每个模块里有4个卷积层(不计算 1 × 1 1\times 1 1×1卷积层),加上最开始的卷积层和最后的全连接层,共计18层。这个模型通常也被称为ResNet-18。通过配置不同的通道数和模块里的残差块数可以得到不同的ResNet模型,例如更深的含152层的ResNet-152。虽然ResNet的主体架构跟GoogLeNet的类似,但ResNet结构更简单,修改也更方便。这些因素都导致了ResNet迅速被广泛使用。
在训练ResNet之前,我们来观察一下输入形状在ResNet不同模块之间的变化。
X = torch.rand((1, 1, 224, 224))
for name, layer in net.named_children():
X = layer(X)
print(name, ' output shape:\t', X.shape)
输出:
0 output shape: torch.Size([1, 64, 112, 112])
1 output shape: torch.Size([1, 64, 112, 112])
2 output shape: torch.Size([1, 64, 112, 112])
3 output shape: torch.Size([1, 64, 56, 56])
resnet_block1 output shape: torch.Size([1, 64, 56, 56])
resnet_block2 output shape: torch.Size([1, 128, 28, 28])
resnet_block3 output shape: torch.Size([1, 256, 14, 14])
resnet_block4 output shape: torch.Size([1, 512, 7, 7])
global_avg_pool output shape: torch.Size([1, 512, 1, 1])
fc output shape: torch.Size([1, 10])
3. 获取数据和训练ResNet模型
下面我们在Fashion-MNIST数据集上训练ResNet。
batch_size = 256
# 如出现“out of memory”的报错信息,可减小batch_size或resize
train_iter, test_iter = d2l.load_data_fashion_mnist(batch_size, resize=96)
lr, num_epochs = 0.001, 5
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
d2l.train_ch5(net, train_iter, test_iter, batch_size, optimizer, device, num_epochs)
输出:
training on cuda
epoch 1, loss 0.0015, train acc 0.853, test acc 0.885, time 31.0 sec
epoch 2, loss 0.0010, train acc 0.910, test acc 0.899, time 31.8 sec
epoch 3, loss 0.0008, train acc 0.926, test acc 0.911, time 31.6 sec
epoch 4, loss 0.0007, train acc 0.936, test acc 0.916, time 31.8 sec
epoch 5, loss 0.0006, train acc 0.944, test acc 0.926, time 31.5 sec
4. 总结
- 残差块通过跨层的数据通道从而能够训练出有效的深度神经网络。
如果文章内容对你有帮助,感谢点赞+关注!
关注下方GZH:阿旭算法与机器学习,可获取更多干货内容~欢迎共同学习交流