从Pearson相关系数到模板匹配的NCC方法
文章目录
NCC(Normalized Cross Correlation) -
- 1.**Pearson相关系数**
- 2.**协方差 covariance**
- 3. **方差 variance**
- 4.模板匹配中的NCC方法
- 5.实现过程
- 6.测试结果
- 7.部分核心源码
-
- NCC.cpp
NCC(Normalized Cross Correlation)
从Pearson相关系数到模板匹配的NCC方法
1.Pearson相关系数
Pearson相关系数是用来衡量两个变量之间的相关性,由下式给出
p = c o v ( X , Y ) σ ( X ) σ ( Y ) p = \frac{cov(X,Y)}{\sigma(X)\sigma(Y)} p=σ(X)σ(Y)cov(X,Y)
p在数值上在[-1,1]之间
- 当p=0时,说明两个变量不想关;
- 当p>0时,两个变量正相关,而且p越大正相关性越强;
- 当p<0时,两个变量负相关,而且p越小负相关性越强;
上式中 c o v ( X , Y ) cov(X,Y) cov(X,Y)表示的是两个变量 X 、 Y X、Y X、Y的协方差, σ ( X ) \sigma(X) σ(X)表示的是变量X的标准差差, σ ( Y ) \sigma(Y) σ(Y)表示的是变量Y的标准差$。
2.协方差 covariance
协方差也是用来衡量两个变量之间的相关性的,当两个变量之间的协方差是0时不相关(两个变量相互独立),大于0时正相关,小于0时负相关。例如身高和体重之间的协方差就是一个正数,因为身高和体重是正相关的。
协方差由下式给出:
c o v ( X , Y ) = E [ ( X − E ( X ) ) ( Y − E ( Y ) ) ] cov(X,Y)=E[(X-E(X))(Y-E(Y))] cov(X,Y)=E[(X−E(X))(Y−E(Y))]
其中E()表示变量的数学期望,eg:E(X)表示变量X的数学期望, E [ X ] = Σ μ i x i , μ i 是 x i E[X]=\Sigma \mu_i x_i,\mu_i 是 x_i E[X]=Σμixi,μi是xi的权重,如果每个样本的权重都相等的话则写为: E [ X ] = Σ x i n E[X]=\frac{\Sigma x_i}{n} E[X]=nΣxi。
此外协方差的等价式
c o v ( X , Y ) = E [ ( X − E ( X ) ) ( Y − E ( Y ) ) ] = E [ X Y − X E ( Y ) − Y E ( X ) + E ( X ) E ( Y ) ] = E ( X Y ) − 2 E ( X ) E ( Y ) + E ( X ) E ( Y ) = E ( X Y ) − E ( X ) E ( Y ) \begin{aligned} cov(X,Y) &= E[(X-E(X))(Y-E(Y))]\\ &=E[XY - XE(Y) - YE(X) + E(X)E(Y)]\\ &=E(XY)-2E(X)E(Y) + E(X)E(Y)\\ &=E(XY)-E(X)E(Y) \end{aligned} cov(X,Y)=E[(X−E(X))(Y−E(Y))]=E[XY−XE(Y)−YE(X)+E(X)E(Y)]=E(XY)−2E(X)E(Y)+E(X)E(Y)=E(XY)−E(X)E(Y)
协方差示例
有三个人的身高体重数据,X表示身高,Y表示体重
X身高(cm): 100,150,200
Y体重(kg): 50,100,150
则身高和体重的协方差 c o v ( X , Y ) = E ( X Y ) − E ( X ) E ( Y ) 则身高和体重的协方差cov(X,Y)=E(XY)-E(X)E(Y) 则身高和体重的协方差cov(X,Y)=E(XY)−E(X)E(Y)
其中:
E ( X ) = 1 3 ( 100 + 150 + 200 ) = 150 E(X)=\frac{1}{3}(100+150+200)=150 E(X)=31(100+150+200)=150,
E ( Y ) = 100 , E ( X Y ) = 1 3 ( 100 ∗ 50 + 150 ∗ 100 + 200 ∗ 150 ) = 50000 3 E(Y)=100,E(XY)=\frac{1}{3}(100*50+150*100+200*150)=\frac{50000}{3} E(Y)=100,E(XY)=31(100∗50+150∗100+200∗150)=350000
c o v ( X , Y ) = E ( X Y ) − E ( X ) E ( Y ) = 50000 3 − 150 ∗ 100 = 5000 3 . cov(X,Y)=E(XY)-E(X)E(Y)=\frac{50000}{3}-150*100=\frac{5000}{3}. cov(X,Y)=E(XY)−E(X)E(Y)=350000−150∗100=35000.
3. 方差 variance
在考察单个变量的分布特征时有方差(variance)的概念,方差是一个大于等于0的实数,方差为0表示变量分布完全集中在一个点上,方差越大变量的分布越分散。方差由下式给出: v a r ( X ) = E [ ( X − E ( X ) ) 2 ] var(X)=E[(X-E(X))^2] var(X)=E[(X−E(X))2] 观察可以看到方差是协方差的一个特例,即cov(X,X)=var(X).$
4.模板匹配中的NCC方法
模板匹配就是给定一个目标图和一个搜索图,采用一定的搜索策略去找到一个和目标相近的区域,在刚性模板匹配中,一般都是采用滑窗的方法来搜索,在比较两个图的相似度时有很多种方法,最简单的就是两个图像直接相减,NCC(Normalized Cross Correlation)就是计算两张图的pearson相关性,值越大说明两个图像越相像。
记 T m × n 为目标图 ( t a r g e t ) 记T_{m\times n}为目标图(target) 记Tm×n为目标图(target), S M × N S_{M\times N} SM×N为源搜索图(source), S x , y S_{x,y} Sx,y为S中以点 ( x , y ) (x,y) (x,y)为左上角的和T大小相同的子图, R ( M − m + 1 ) × ( N − n + 1 ) R_{(M-m+1)\times (N-n+1)} R(M−m+1)×(N−n+1)为匹配的结果图,则 R ( x , y ) = c o v ( S x , y , T ) σ ( S x , y ) σ ( T ) R(x,y)=\frac{cov(S_{x,y},T)}{\sigma(S_{x,y})\sigma(T)} R(x,y)=σ(Sx,y)σ(T)cov(Sx,y,T)
其中 c o v ( S x , y , T ) = E ( S x , y T ) − E ( S x , y ) E ( T ) = Σ i = 1 m Σ j = 1 n S x , y ( i , j ) T ( i , j ) m n − S x , y ˉ T ˉ \begin{aligned} cov(S_{x,y},T) &=E(S_{x,y}T)-E(S_{x,y})E(T)\\ &=\frac{\Sigma_{i=1}^{m}\Sigma_{j=1}^{n}S_{x,y}(i,j)T(i,j)}{mn} - \bar{S_{x,y}}\bar{T} \end{aligned} cov(Sx,y,T)=E(Sx,yT)−E(Sx,y)E(T)=mnΣi=1mΣj=1nSx,y(i,j)T(i,j)−Sx,yˉTˉ
S x , y ˉ = Σ i = 1 m Σ j = 1 n S x , y ( i , j ) m n \bar{S_{x,y}}=\frac{\Sigma_{i=1}^{m}\Sigma_{j=1}^{n}S_{x,y}(i,j)}{mn} Sx,yˉ=mnΣi=1mΣj=1nSx,y(i,j)
T ˉ = Σ i = 1 m Σ j = 1 n T ( i , j ) m n \bar{T} = \frac{\Sigma_{i=1}^{m}\Sigma_{j=1}^{n}T(i,j)}{mn} Tˉ=mnΣi=1mΣj=1nT(i,j)
σ ( S x , y ) = v a r ( S x , y ) = Σ i = 1 m Σ j = 1 n ( S x , y ( i , j ) − S x , y ˉ ) 2 m n \sigma(S_{x,y})=\sqrt{var(S_{x,y})}=\sqrt{\frac{\Sigma_{i=1}^{m}\Sigma_{j=1}^{n}{(S_{x,y}(i,j)-\bar{S_{x,y}}})^2}{mn}} σ(Sx,y)=var(Sx,y)=mnΣi=1mΣj=1n(Sx,y(i,j)−Sx,yˉ)2
σ ( T ) = v a r ( S x , y ) = Σ i = 1 m Σ j = 1 n ( T ( i , j ) − T ˉ ) 2 m n \sigma(T)=\sqrt{var(S_{x,y})}=\sqrt{\frac{\Sigma_{i=1}^{m}\Sigma_{j=1}^{n}{(T(i,j)-\bar{T}})^2}{mn}} σ(T)=var(Sx,y)=mnΣi=1mΣj=1n(T(i,j)−Tˉ)2
上面的式子展开看起来感觉很复杂,以往看到的也都是这样完全展开又组合在一起的式子,就像opencv官网的解释,很完整但是让人很费解,具体为什么是这样搞不清楚(也可能是我菜吧),但是看上面R(x,y)的式子意义是很明确的,就是计算两个图之间的Pearson相关系数。按照公式就可以直接开工写代码了。
5.实现过程
观察式子: R ( x , y ) = c o v ( S x , y , T ) σ ( S x , y ) σ ( T ) R(x,y)=\frac{cov(S_{x,y},T)}{\sigma(S_{x,y})\sigma(T)} R(x,y)=σ(Sx,y)σ(T)cov(Sx,y,T)
可以发现 σ ( T ) \sigma(T) σ(T)是固定的,模板给定之后值就确定了,只需要计算一次。 σ ( S x , y )和 c o v ( S x , y , T ) \sigma(S_{x,y})和cov(S_{x,y},T) σ(Sx,y)和cov(Sx,y,T)的计算过程中一直要用到 S x , y ˉ \bar{S_{x,y}} Sx,yˉ,如果直接去计算这个平均值将会有很多计算是浪费掉的,可以用积分图来加速这个过程
几个核心的步骤
- 计算两个图的协方差
- 计算图的灰度均值
- 计算图的标准差
在实现上第一版先只打算跑通整个NCC的计算流程,后续如果有机会的话可以再考虑做几个优化版本。目前很明确想到的有下面这几个:
- 积分图加速均值的计算
- 计算协方差时用到卷积用FFT加速
- 金字塔加速
- 指令集优化
- 多线程
6.测试结果
-
source
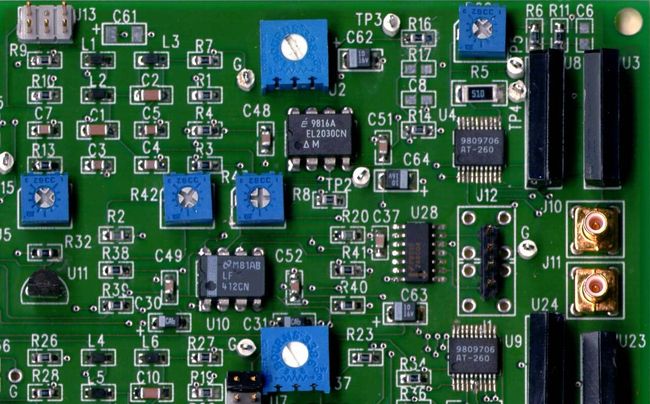
-
target

- result
可以看到在目标处得到最大值,也就是正确匹配到了目标图。
7.部分核心源码
source image size w,h = (1095,680)
target image size w,h = (89,91)
my NCC run 10 times, use 12359.000000 ms
opencv NCC run 10 times, use 14.000000 ms
opencv的速度是该版本的882.78倍。
NCC.cpp
namespace mycv
{
/**
* @brief 模板匹配,归一化交叉相关算法。衡量模板和待匹配图像的相似性时
* 用(Pearson)相关系数来度量。
* r=cov(X,Y)/(sigma(X) * sigma(Y))
* 其中cov(X,Y): 表示两个变量的协方差
* cov(X,Y) = E[(X-E(x)) * (Y-E(Y))] = E(XY) - E(x)E(Y)
* sigma(X): 表示X变量的标准差
* sigma(Y): 表示Y变量的标准差
*
* @param source : 搜索图CV_8UC1格式
* @param target :模板图CV_8UC1格式
* @param result : 匹配结果的map图
* @return int : 程序运行的状态码
*/
int NormalizedCrossCorrelation(
const cv::Mat &source,
const cv::Mat &target,
cv::Mat &result
)
{
if(source.empty() || target.empty())
{
MYCV_ERROR(kImageEmpty,"NCC empty input image");
return kImageEmpty;
}
int H = source.rows;
int W = source.cols;
int t_h = target.rows;
int t_w = target.cols;
if(t_h > H || t_w > W)
{
MYCV_ERROR(kBadSize,"NCC source image size should larger than targe image");
return kBadSize;
}
//r = cov(X,Y)/(sigma(X) * sigma(Y))
//sigma(X) = sqrt(var(X))
int r_h = H - t_h + 1; //结果图的高度
int r_w = W - t_w + 1;
double target_mean = calculateMean(target);
double target_var = calculateVariance(target,target_mean);
double target_std_var = std::sqrt(target_var);
result = cv::Mat::zeros(cv::Size(r_w,r_h),CV_32FC1);
for(int row = 0; row < r_h ; row++)
{
float * p = result.ptr<float>(row);
for(int col = 0; col < r_w; col++)
{
cv::Rect ROI(col,row,t_w,t_h);//source上和目标图匹配的子图
cv::Mat temp = source(ROI);
double temp_mean = calculateMean(temp);
double cov = calculateCovariance(temp,target,temp_mean,target_mean);
double temp_var = calculateVariance(temp,temp_mean);
double temp_std_var = std::sqrt(temp_var);
p[col] = cov / ((temp_std_var + 0.0000001) * (target_std_var + 0.0000001));
}
}
return kSuccess;
}
/**
* @brief 计算图像上ROI区域内的均值
*
* @param input : 输入的图像CV_8UC1
* @param ROI : 输入的ROI区域
* @param mean : 返回的区域均值
* @return int
*/
int calculateRegionMean(const cv::Mat &input,const cv::Rect &ROI,double &mean)
{
if(input.empty())
{
MYCV_ERROR(kImageEmpty,"input empty");
return kImageEmpty;
}
if(1 != input.channels())
{
MYCV_ERROR(kBadDepth,"Now only sopurt for one channel image");
return kBadDepth;
}
int h = input.rows;
int w = input.cols;
if((ROI.x+ROI.width > w ) || (ROI.y+ROI.height > h)
|| ROI.width <= 0 || ROI.height <= 0 )
{
MYCV_ERROR(kBadSize,"ROI is too big");
return kBadSize;
}
int tpx = ROI.x;
int tpy = ROI.y;
int btx = ROI.x + ROI.width;
int bty = ROI.y + ROI.height;
double sum = 0;
for(int row = tpy; row < bty; row++)
{
const uchar *p = input.ptr<uchar>(row);
for (int col = tpx ; col < btx ; col++)
{
sum += p[col];
}
}
int pixels_num = ROI.height * ROI.width;
mean = sum / pixels_num;
return kSuccess;
}
/**
* @brief 计算两个输入图的协方差,两个输入图的尺寸需要一致,在计算目标图和原图子块的协方差时,
* 目标图(模板图)是固定的,均值只需要计算一次,所以如果传入图像均值的话就不在计算均值,均值默认为-1
* cov(X,Y): 表示两个变量的协方差
* cov(X,Y) = E[ (X-E(x)) * (Y-E(Y)) ] = E(XY) - E(x)E(Y)
*
* @param A : 输入图A CV_8UC1
* @param B : 输入图B CV_8UC1
* @param mean_a : A的像素均值
* @param mean_b : B的像素均值
* @return double : 两个图像的协方差
*/
double calculateCovariance(const cv::Mat &A, const cv::Mat &B,double mean_a,double mean_b)
{
if(A.empty() || B.empty())
{
MYCV_ERROR(kImageEmpty,"input image is empty");
return kImageEmpty;
}
if (A.cols != B.cols || A.rows != B.rows)
{
MYCV_ERROR(kBadSize,"mat A B should be in same size");
return kBadSize;
}
//E(XY)
double sum = 0;
for (int row = 0; row < A.rows; row++)
{
const uchar *pa = A.ptr<uchar>(row);
const uchar *pb = B.ptr<uchar>(row);
for (int col = 0; col < A.cols; col++)
{
sum += (double)pa[col] * (double)pb[col];
}
}
double mean_AB = sum / ((double)A.rows * (double)A.cols);
if (-1 == mean_a)
{
mean_a = calculateMean(A);
}
if (-1 == mean_b)
{
mean_b = calculateMean(B);
}
//cov(X,Y) = E[ (X-E(x)) * (Y-E(Y)) ] = E(XY) - E(x)E(Y)
double cov_AB = mean_AB - (mean_a * mean_b);
return cov_AB;
}
/**
* @brief 计算输入图像的方差,如果已知mean就不再计算mean
*
* @param image : 输入图CV_8UC1
* @param mean : 图像的灰度均值,默认值为-1,不输入时会计算mean
* @return double :图像的方差
*/
double calculateVariance(const cv::Mat &image,double mean)
{
if (image.empty())
{
MYCV_ERROR(kImageEmpty,"empty image");
return -1;//正常的方差不会小于0
}
if (-1 == mean)
{
mean = calculateMean(image);
}
double sum = 0 ;
for (int row = 0; row < image.cols; row++)
{
const uchar * p = image.ptr<uchar>(row);
for (int col = 0; col < image.cols; col++)
{
sum += (p[col] - mean) * (p[col] - mean);
}
}
double var = sum / ((double)image.cols * (double)image.rows);
return var;
}
/**
* @brief 计算输入图的灰度均值
*
* @param image : 输入图CV_8UC1
* @return double : 输入图像的灰度均值
*/
double calculateMean(const cv::Mat &image)
{
if (image.empty())
{
MYCV_ERROR(kImageEmpty,"empty image");
return -1;
}
double sum = 0 ;
for (int row = 0; row < image.cols; row++)
{
const uchar * p = image.ptr<uchar>(row);
for (int col = 0; col < image.cols; col++)
{
sum += p[col];
}
}
double mean = sum / ((double)image.cols * (double)image.rows);
return mean;
}
} //end namespace mycv