使用COPT求解混合整数线性规划
一、使用Copt求解模型步骤
1.模型的引入
使用 from copt import * 引入模型
import coptpy as cp
2.创建求解环境
env = Envr()
创建优化模型,返回一个Model对象
mdl=env.ccreateModel("name")
3.添加决策变量
添加一个决策变量:mdl.addVar(lb=0.0, ub=COPT.INFINITY, obj=0.0, vtype=COPT.CONTINUOUS, name="", column=None)
Lb:
变量的下界。可选参量,默认为0.0。
Ub:
变量的上界。可选参量,默认为 COPT.INFINITY 。
Obj:
变量的目标函数系数。可选参量,默认为0.0。
Vtype:
变量类型。可选参量,默认为 COPT.CONTINUOUS ,可取值详见 变量类型 。
决策变量的类型用vtype决定。
COPT.CONTINUOUS(连续变量)
COPT.BINARY(二进制变量)
COPT.INTEGER(整数变量)
Name:
变量的名字。可选参量,默认为 "" ,由求解器内部自动生成。
Column:
变量对应的列。可选参量,默认为 None 。
添加一组变量到模型中。并返回一个tupledic类对象。 mdl.addVars(*indices, lb=0.0, ub=COPT.INFINITY, obj=0.0, vtype=COPT.CONTINUOUS, nameprefix="C")
*indices
变量的下标。
lb
变量的下界。可选参量,默认为0.0。
ub
变量的上界。可选参量,默认为 COPT.INFINITY 。
obj
变量的目标函数系数。可选参量,默认为0.0。
vtype
变量的类型。可选参量,默认为 COPT.CONTINUOUS ,可取值详见 变量类型 。
nameprefix
变量的名称前缀。可选参量,默认为 "C",其实际名称结合变量的下标自动生成。
例:
添加一组下标为i,j,k,n,名称为c的二进制变量
arcosC = tuplelist([(i, j, k, n) for i in P_0 for j in P_0 for k in K for n in N])
c = mdl.addVars(arcosC,vtype=COPT.BINARY,nameprefix='C')4.添加目标函数
mdl.setObjective(expr, sense=None)
expr
目标函数的表达式。可取值为常数、Var类 对象、 LinExpr类 对象和 QuadExpr类 对象。
sense
目标函数的优化方向。可选参量,默认为 None ,表示不改动模型的优化方向。 模型的当前优化方向通过属性 ObjSense 查看。
sense=COPT.MAXIMIZE(优化方向为最大化)
sense= COPT.MINIMIZE(优化方向为最小化)
例:
添加式子为:minZ=e+i,s,jyijs ∀k∈K,n∈N![]() 的目标函数
的目标函数
TK = e + cp.quicksum(y[i, j, s] for i in P_1 for j in P_1 for s in S)
mdl.setObjective(TK,COPT.MINIMIZE)5.添加约束条件
mdl.addConstr(lhs, sense=None, rhs=None, name="")添加一个线性约束
lhs
线性约束的左端项或约束构建器。
sense
线性约束的类型。可选参量,默认为 None 。
约束类型判断线性约束左边与右边的关系
约束类型为等于
Sense=COPT.EQUAL
约束类型为小于等于
Sense=COPT.LESS_EQUAL
rhs
线性约束的右端项。可选参量,默认为 None 。可取值为常数、 Var类 对象或 LinExpr类 对象。
name
线性约束的名称。可选参量,默认为 "",由求解器内部自动生成。
mdl.addConstrs(generator, nameprefix="C") 添加一组线性约束
generator
整数或表达式生成器。
Nameprefix
线性约束的名称前缀。可选参量,默认为 "C",其实际名称结合线性约束的下标自动生成。
例:添加式为:{i∈P0}cijkn+{i∈P1, s∈S}aisjkn≤{i∈P1, s∈S,j∈P0}aisjkn , ∀ j∈P0, k∈K,n∈N![]() 的约束条件。
的约束条件。
mdl.addConstrs(cp.quicksum(c[i, j, k, n] for i in P_0 ) +cp.quicksum(a[i, j, s, k, n] for i in P_1 for s in S ) <=cp.quicksum(a[i, j, s, k, n] for i in P_1 for s in S for j in P_0 ) for j in P_0 for k in K for n in N)cp.quicksum(data) 描述:快速构建表达式,返回一个 LinExpr类 对象。
生成表达式待加
6.求解
求解时间限制:
mdl.param.timelimit = time
求解
mdl.solve()
二、使用python求解一个混合整数线性规划模型代码实例
n=10 # 设置航点数为10
flypoint=[x for x in range(2,n+2)] #除起点外需要被旅行的航点数
point=[0]+[1]+flypoint
startpoint=[0]+[1] #有两个航点是起点
import numpy as np
rnd=np.random
rnd.seed(0)
rnd.seed(0)
loc_x=rnd.rand(len(point))*200 #随机生成航点的横坐标
loc_y=rnd.rand(len(point))*100 #随机生成航点的纵坐标
arcos={(i,j) for i in point for j in point if i!=j} #表示旅行者从航点i到航点j
distancia={(i,j):np.hypot(loc_x[i]-loc_x[j],loc_y[i]-loc_y[j])
for i in point for j in point if i!=j} #计算航点之间的距离
import coptpy as cp
from coptpy import *
# Create COPT environment
env = Envr()
# create model
mdl = env.createModel("MIP example")
x=mdl.addVars(arcos,vtype=COPT.BINARY,nameprefix='x') #一个名为x的二元变量
s=mdl.addVars(flypoint,vtype=COPT.CONTINUOUS,nameprefix='s') #一个名为s的连续变量
mdl.setObjective(cp.quicksum(x[i,j]*distancia[i,j] for i,j in arcos),COPT.MINIMIZE) #目标函数,最小化旅行距离
obj=mdl.getObjective()
print(obj)
#约束条件
mdl.addConstrs(cp.quicksum(x[i,j] for j in flypoint if (i,j) in x.keys() )==1 for i in startpoint)
mdl.addConstrs(cp.quicksum(x[i,j] for i in flypoint if (i,j) in x.keys() )==1 for j in startpoint)
mdl.addConstrs(cp.quicksum(x[i,j] for i in point if (i,j) in x.keys() )==1 for j in flypoint)
mdl.addConstrs(cp.quicksum(x[j,i] for i in point if (j,i) in x.keys() )==1 for j in flypoint)
mdl.addConstrs(s[i]-(n+1)*x[i,j] >=s[j]-n for i in flypoint for j in flypoint if (i,j) in x.keys())
mdl.param.timelimit = 60
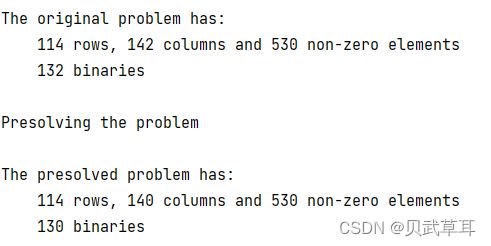
mdl.solve()三、cplex求解结果与COPT求解结果对比
在小规模场景下COPT求解结果

同场景下CPLEX求解结果:

