海康威视相机控制进阶
准备工作:
1、安装软件
下载并安装OpenCV库:登录Releases - OpenCV并下载OpenCV-4.6.0,完成后按提示安装即可。

2、相关配置
2.1、OpenCV库的相关配置
2.1.1、配置Windows系统环境变量
此电脑->属性->高级系统设置->高级->环境变量->系统变量->Path,在OpenCV的默认安装路径找到C:\opencv\build\x64\vc15\bin并将该路径添加到Path中然后单击确定。



2.1.2配置VS C++控制台项目属性
项目->属性->配置属性->VC++目录->可执行文件目录,添加OpenCV的安装路径:
C:\opencv\build\x64\vc15\bin
项目->属性->配置属性->VC++目录->包含目录,添加OpenCV的安装路径:
C:\Users\wenxi\opencv\build\include\opencv2
C:\Users\wenxi\opencv\build\include\opencv
C:\Users\wenxi\opencv\build\include
项目->属性->配置属性->VC++目录->库目录,添加OpenCV的安装路径:
C:\opencv\build\x64\vc15\lib

项目->属性->配置属性->链接器->输入->附加依赖项,添加C:\opencv\build\x64\vc15\lib中的opencv_world451d.lib文件。


2.2、配置MVS软件SDK
2.2.1、配置VS C++控制台项目属性
项目->属性->配置属性->链接器->常规->附加库目录,添加SDK的安装目录:
C:\Program Files (x86)\Softwares\MVS\Development\Libraries\win64,
C:\Program Files (x86)\Softwares\MVS\Development\Includes

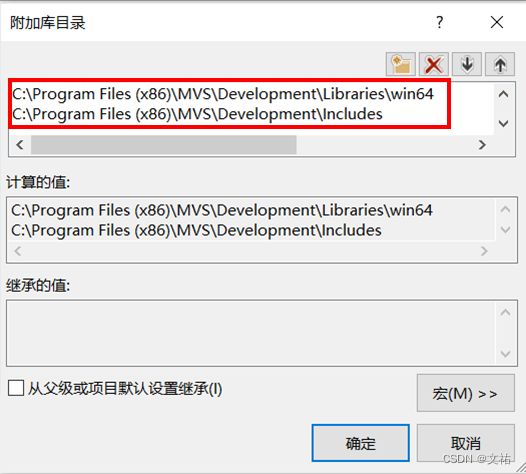
项目->属性->配置属性->链接器->输入->附加依赖项,添加SDK的文件:MvCameraControl.lib


该文件在C:\Program Files (x86)\MVS\Development\Libraries\win64路径下:

参考文档:
海康威视工业相机SDK二次开发(VS+Opencv+QT+海康SDK+C++)(一)
海康工业相机SDK+OpenCV实例(1):海康SDK和OPENCV的安装与编译
OpenCV (一)—安装与配置 VS2019和OpenCV4.5.1
解决方案-Visual Studio设置通用配置(包含路径+依赖库)
开始编程与调试
安装好MVS后,在安装路径C:\Program Files (x86)\MVS\Development\Documentations可以找到官方SDK的使用说明,打开工业相机SDK开发指南V4.0.0(C)可以查看海康威视相机二次开发教程:

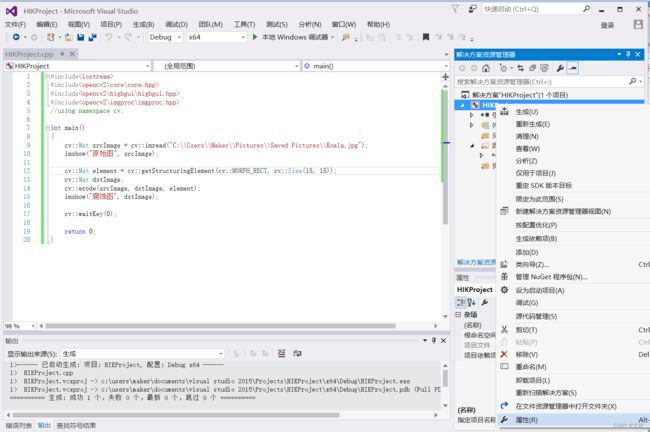
此处选择GrabImage.cpp进行调试:
#include 报错1:

没有将准备工作中的MVS SDK配置好,
项目->属性->配置属性->链接器->常规->附加库目录,添加SDK的安装目录:
C:\Program Files (x86)\Softwares\MVS\Development\Libraries\win64,
C:\Program Files (x86)\Softwares\MVS\Development\Includes
项目->属性->配置属性->链接器->输入->附加依赖项,添加SDK的文件:MvCameraControl.lib即可。
报错2:


项目->属性->配置属性->常规->公共语言运行时支持,选择无公共语言运行时支持即可。
参考文档:
海康威视相机MVS软件SDK文档
C++通过DLL调用C#代码
编译器警告(等级 1 和等级 3)C4793
链接器工具错误 LNK2019