(超)SLIC----解析、代码
SLIC(simple linear iterativeclustering),即 简单线性迭代聚类 。
它是2010年提出的一种思想简单、实现方便的算法,将彩色图像转化为CIELAB颜色空间和XY坐标下的5维特征向量,然后对5维特征向量构造距离度量标准,对图像像素进行局部聚类的过程。
SLIC算法能生成紧凑、近似均匀的超像素,在运算速度,物体轮廓保持、超像素形状方面具有较高的综合评价,比较符合人们期望的分割效果。其实是从k-means算法演化的,算法复杂度是O(n),只与图像的像素点数有关,而与k值无关。而常规的k均值算法的复杂度是O(kni),i为迭代次数。
SLIC主要优点如下:
1)生成的超像素如同细胞一般紧凑整齐,邻域特征比较容易表达。这样基于像素的方法可以比较容易的改造为基于超像素的方法。
2)不仅可以分割彩色图,也可以兼容分割灰度图。
3)需要设置的参数非常少,默认情况下只需要设置一个预分割的超像素的数量。
4)相比其他的超像素分割方法,SLIC在运行速度、生成超像素的紧凑度、轮廓保持方面都比较理想。
超像素:
超像素概念是2003年Xiaofeng Ren提出和发展起来的图像分割技术。
是指具有相似纹理、颜色、亮度等特征的相邻像素构成的有一定视觉意义的不规则像素块。
它利用像素之间特征的相似性将像素分组,用少量的超像素代替大量的像素来表达图片特征(捕获图像的冗余信息),很大程度上降低了图像后处理的复杂度,所以通常作为分割算法的预处理步骤。
已经广泛用于图像分割、姿势估计、目标跟踪、目标识别等计算机视觉应用。需要注意的是,超像素分割算法很可能把同一个物体的不同部分分成多个超像素。
SLC的创新点:
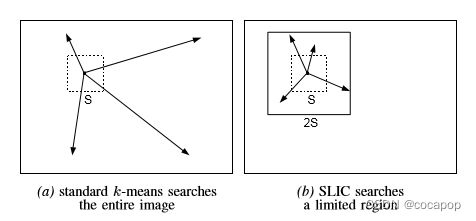
1.SLIC限制聚类时搜索的区域(2Sx2S)————》原K均值算法中,计算的是聚类中心到图像中的每个像素的距离——》把k-means的算法复杂度降为常数,整个算法复杂度为线性
2.距离度量考虑lab颜色和xy距离,五维数据。 且可以考虑颜色和距离的比重,使超像素更加灵活。
SLIC算法步骤分析:
均匀撒k个种子并移动到梯度最小的地方——》为每个像素计算D并分配种子标签——》重新计算聚类中心——》增强区域连通性解决孤立点和超像素过小情况
对源文章过程的解析:
step1:初始化聚类中心且用五维数据表示,聚类中心 之间的间隔为S(步长s对像素进行采样,初始化聚类中心)
step2:移动聚类中心到33范围内梯度最低的地方
step3:对每一个像素i,设置label。取label第一个字母l表示label。l表示为每个像素点是属于哪个超像素,初始设置为-1
step4:对每个像素i,设置距离d(i)=正无穷 【ps.因为后面更新的时候,是根据距离数值小的点进行更新】
step5.循环以下过程————对每个聚类中心外循环,在围绕聚类中心的2s2s范围内的对每个像素i内循环—》如果距离度量值D数值小,就更新d(i)的值,将label(i)设置为所对应的超像素
step6.计算新的聚类中心和先前聚类中心位置之间的残差误差E。迭代直到错误收敛。 【ps.一般迭代10次差不多了】

1.撒种子。根据图像大小和定义的超像素数目K,将k个超像素中心均匀分布到图像的像素点上。假设图片总共有 N 个像素点,预分割为 K 个相同尺寸的超像素,那么每个超像素的大小为N/ K ,则相邻种子点的距离(步长)近似为S=sqrt(N/K)。
2.调整种子位置。以k为中心的nn(一般n取3,故为33)范围内,将超像素中心移动到这9个点中梯度最小的点上。目的是为了避免超像素点落入噪点或边界处。
3.初始化数据。在每个种子点周围的邻域内为每个像素点分配类标签lable(即该像素点是属于哪个聚类中心的)。做法:取一个数组label,保存每个像素点是属于哪个超像素。dis数据保存像素点到它属于的那个超像素中心之间的距离。
4.更新数据。对每一个超像素中心x,在其2s*2s范围内搜索;如果点到超像素中心x的距离(五维)小于点到它原来属于的超像素中心的距离,说明这个点属于超像素x。(新距离小于旧距离,则点属于新范围。更新dis,更新label)----》每个像素必须与所有聚类中心比较,通过引入距离测量D值。**【期望的超像素尺寸为SS,但是搜索的范围是2S2S】【由于每个像素点都会被多个种子点搜索到,所以每个像素点都会有一个与周围种子点的距离,取最小值对应的种子点作为该像素点的聚类中心。】**
5.计算。对每一个超像素中心,重新计算它的位置(属于该超像素的所有像素的位置中心)以及lab值。
6.迭代4、5步骤。【理论上上述步骤不断迭代直到误差收敛(可以理解为每个像素点聚类中心不再发生变化为止),实践发现10次迭代对绝大部分图片都可以得到较理想效果,所以一般迭代次数取10。】
后处理步骤:
可能存在不属于任何聚类的孤立像素,可以使用联通分量算法对这些像素分配最近聚类中心的标签。
增强连通性。经过上述迭代优化可能出现以下瑕疵:出现多连通情况、超像素尺寸过小,单个超像素被切割成多个不连续超像素等,这些情况可以通过增强连通性解决。
主要思路是:新建一张标记表,表内元素均为-1,按照“Z”型走向(从左到右,从上到下顺序)将不连续的超像素、尺寸过小超像素重新分配给邻近的超像素,遍历过的像素点分配给相应的标签,直到所有点遍历完毕为止。
关键步骤:
4和5【用到了k-means算法的思想】
步骤4相当于:知道超像素点,然后再给定一系列像素点。将像素点分类到某一超像素类中。
步骤5相当于:计算某类超像素类中,像素点的中心,然后让超像素点移动到刚才计算出来的中心位置。
迭代相当于:再让所有像素点分到某一超像素圈圈中,然后重新计算像素点中的中心,移动超像素中心到刚才的中心。然后重复。

注意:SLIC和K-means的区别是SLIC加快了计算速度,即,进行步骤4时只计算超像素中心有限范围内的点。
Lab彩色空间介绍:
L:亮度。值域为0(黑)~100(白)
a:从洋红色至绿色的范围。(a为负数指代绿色,a为正数指代品红色)
b:从黄色至蓝色的范围。(b为负数指代蓝色,b为正数指代黄色)
LAB彩色模型的最大优点:弥补了RGB彩色模型中色彩不均匀的缺点。因为RGB模型在蓝色到绿色之间的过渡色彩过多,而绿色到红色之间又缺少黄色和其他颜色。故,选择LAB色彩模型,可以保留尽量宽阔的色域和颜色。【
1)不像RGB和CMYK色彩空间,Lab 颜色被设计来接近人类生理视觉。它致力于感知均匀性,它的 L 分量密切匹配人类亮度感知。因此可以被用来通过修改 a 和 b 分量的输出色阶来做精确的颜色平衡,或使用 L 分量来调整亮度对比。这些变换在 RGB 或 CMYK 中是困难或不可能的。
2)因为 Lab 描述的是颜色的显示方式,而不是设备(如显示器、打印机或数码相机)生成颜色所需的特定色料的数量,所以 Lab 被视为与设备无关的颜色模型。
3)色域宽阔。它不仅包含了RGB,CMYK的所有色域,还能表现它们不能表现的色彩。人的肉眼能感知的色彩,都能通过Lab模型表现出来。
另外,Lab色彩模型的绝妙之处还在于它弥补了RGB色彩模型色彩分布不均的不足,因为RGB模型在蓝色到绿色之间的过渡色彩过多,而在绿色到红色之间又缺少黄色和其他色彩。如果我们想在数字图形的处理中保留尽量宽阔的色域和丰富的色彩,最好选择Lab。
】
距离的度量:
如果直接将l,a,b,x,y拼接成一个矢量计算距离,当超像素的大小变化时,x,y的值可以取到非常大 ,比如如果一张图10001000,空间距离可以达到1000Sqr(2),而颜色距离最大仅10*Sqr(2),导致最终计算得到的距离值中,空间距离ds权重占比过大。
所以需要进行归一化,除以最大值即超像素点的初始宽度S,将值映射到[0,1]。
而颜色空间距离也会给到一个固定的值m来调节颜色距离与空间距离的影响权重,m取值范围为[1,40]。
最终距离公式为D。

m还允许我们权衡颜色相似性和空间邻近度之间的相对重要性。
当m大时,(空间距离的权重越大)空间邻近性更重要,得到的超像素更紧凑(规则)
当m小时,(颜色距离权重更大)超像素更紧密的附着到图像边界,但具有较小的规则尺寸和形状(不规则)
代码需实现步骤:
1.完成框架:包含头文件、定义变量、配置opencv、配置vscode
2.函数实现:mread读取图片——》resize图片并滤波——》cvtColor完成RGB到LAB空间的转换——》定义计算距离的参数N、K、S——》像素初始化init_clusters——》在定义的超像素框框内循环完成数据初始化update_pixel+更新超像素位置updaye_clusters+标识超像素draw_clusters+绘制超像素的图final_draw
#include 函数实现:
一、init_clusters
1.像素初始化函数init_clusters,传入的参数为lab彩色空间和S超像素间距
注意:opencv中Mat类的赋值不是拷贝赋值,而是像C++中的引用赋值。(就是把原来的值也给改了,就是这个意思。比如:Mat a,b; b=a; 改变a也会改变b)
· 所以如果想得到一个全新的图像矩阵,可以使用b=a.clone(); 这样改变a,b的值不会被改
· fill函数用于对一段空间赋值,这里即将矩阵dis赋-1。(在非opencv程序也可以使用)
void init_clusters(const Mat lab,int S) {
// 初始化每一个超像素的坐标
for (int i = 0; i < sqrtK; i++) { //超像素个数sqrtK=128
int temp_row = S / 2 + i * S;
for (int j = 0; j < sqrtK; j++) {
clusters[i * sqrtK + j].row = temp_row;
clusters[i * sqrtK + j].col = S / 2 + j * S;
// cout << clusters[i * sqrtK + j].row << "\t" << clusters[i * sqrtK + j].col
// << "\t" << clusters[i * sqrtK + j].h << endl;
}
}
// 初始化每一个像素的label(即属于哪一个超像素)
for (int i = 0; i < sqrtN; i++) { //图片像素sqrtN=512
int cluster_row = i / S;
for (int j = 0; j < sqrtN; j++) {
label[i][j] = cluster_row * sqrtK + j / S;
// cout << cluster_row * sqrtK + j / S << endl;
}
}
// 像素与超像素的距离先假设为-1
fill(dis[0], dis[0] + (sqrtN * sqrtN), -1);
}
二、update_pixel函数
· 首先定义距离计算函数get_distance
传入的参数为lab、超像素索引clusters_index、像素的横纵坐标i和j
·lab.at(row,col)属于opencv里面的写法,用于访问矩阵lab在坐标(row,col)的值。Vec3b表示3通道,每个通道为uchar类型(0-255)。
inline int get_distance(const Mat lab,int clusters_index,int i,int j) {
int dl = clusters[clusters_index].l - lab.at<Vec3b>(i, j)[0];
int da = clusters[clusters_index].a - lab.at<Vec3b>(i, j)[1];
int db = clusters[clusters_index].b - lab.at<Vec3b>(i, j)[2];
int dx = clusters[clusters_index].row - i;
int dy = clusters[clusters_index].col - j;
int h_distance = dl * dl + da * da + db * db;
int xy_distance = dx * dx + dy * dy;
//cout << h_distance << "\t" << xy_distance * 100 << endl;
return h_distance + xy_distance * 100;
}
完成update_pixel函数:
void update_pixel(const Mat lab,int s) {
for (int i = 0; i < sqrtK * sqrtK; i++) { // 对于每一个超像素
int clusters_x = clusters[i].row;
int clusters_y = clusters[i].col;
for (int x = -s; x <= s; x++) { // 在它周围-s到s的范围内
for (int y = -s; y <= s; y++) {
int now_x = clusters_x + x;
int now_y = clusters_y + y;
if (now_x < 0 || now_x >= sqrtN || now_y < 0 || now_y >= sqrtN)
continue;
int new_dis = get_distance(lab, i, now_x, now_y);
// 如果为-1(还没有更新过)或者新的距离更小,就更换当前像素属于的超像素
if (dis[now_x][now_y] > new_dis || dis[now_x][now_y] == -1) {
dis[now_x][now_y] = new_dis;
label[now_x][now_y] = i;
}
}
}
}
}
三、updaye_clusters函数
根据当前超像素的所有归属像素来更新位置。需要注意的是C++用new申请空间时后面加上()会自动初始化申请的空间。且new出的空间需要程序员手动delete释放。
void updaye_clusters(const Mat lab) {
int *sum_count = new int[sqrtK * sqrtK]();
int *sum_i = new int[sqrtK * sqrtK]();
int *sum_j = new int[sqrtK * sqrtK]();
int* sum_l = new int[sqrtK * sqrtK]();
int* sum_a = new int[sqrtK * sqrtK]();
int* sum_b = new int[sqrtK * sqrtK]();
for (int i = 0; i < sqrtN; i++) {
for (int j = 0; j < sqrtN; j++) {
sum_count[label[i][j]]++;
sum_i[label[i][j]] += i;
sum_j[label[i][j]] += j;
sum_l[label[i][j]] += lab.at<Vec3b>(i, j)[0];
sum_a[label[i][j]] += lab.at<Vec3b>(i, j)[1];
sum_b[label[i][j]] += lab.at<Vec3b>(i, j)[2];
}
}
for (int i = 0; i < sqrtK * sqrtK; i++) {
if (sum_count[i] == 0) {
continue;
}
clusters[i].row = round(sum_i[i] / sum_count[i]);
clusters[i].col = round(sum_j[i] / sum_count[i]);
clusters[i].l = round(sum_l[i] / sum_count[i]);
clusters[i].a = round(sum_a[i] / sum_count[i]);
clusters[i].b = round(sum_b[i] / sum_count[i]);
}
delete[] sum_count;
delete[] sum_i;
delete[] sum_j;
delete[] sum_l;
delete[] sum_a;
delete[] sum_b;
}
四、draw_clusters函数——画出每一个朝像素点
五、final_draw函数——绘制一张超像素分割图
void draw_clusters(const Mat copy) {
for (int index = 0; index < sqrtK * sqrtK; index++) {
Point p(clusters[index].row, clusters[index].col);
circle(copy, p, 1, Scalar(0, 0, 255), 1); // 画半径为1的圆(画点)
}
imshow("超像素示意图", copy);
}
void final_draw(const Mat lab,Mat copy) {
for (int i = 0; i < sqrtN; i++) {
for (int j = 0; j < sqrtN; j++) {
int index = label[i][j];
copy.at<Vec3b>(i, j)[0] = lab.at<Vec3b>(clusters[index].row, clusters[index].col)[0];
copy.at<Vec3b>(i, j)[1] = lab.at<Vec3b>(clusters[index].row, clusters[index].col)[1];
copy.at<Vec3b>(i, j)[2] = lab.at<Vec3b>(clusters[index].row, clusters[index].col)[2];
}
}
cvtColor(copy, copy, CV_Lab2BGR);
imshow("分割图", copy);
}
六、draw_edge
void draw_edge(const Mat lab, Mat copy) {
// 这里的代码和上面的函数几乎一样,都是同标签的绘制相应的超像素颜色,因为方便用户自己选用绘制函数所以没有调用上面的函数
for (int i = 0; i < sqrtN; i++) {
for (int j = 0; j < sqrtN; j++) {
int index = label[i][j];
copy.at<Vec3b>(i, j)[0] = lab.at<Vec3b>(clusters[index].row, clusters[index].col)[0];
copy.at<Vec3b>(i, j)[1] = lab.at<Vec3b>(clusters[index].row, clusters[index].col)[1];
copy.at<Vec3b>(i, j)[2] = lab.at<Vec3b>(clusters[index].row, clusters[index].col)[2];
}
}
// 这里的思路是4个方向,一旦有标签不同,就设置为黑色(超像素边界为黑色
static int X[] = { 0,0,-1,1 };
static int Y[] = { 1,-1,0,0 };
cvtColor(copy, copy, CV_Lab2BGR); // 改成BGR,方便后面设置边框的颜色。
for (int i = 0; i < sqrtN; i++) {
for (int j = 0; j < sqrtN; j++) {
int index = label[i][j];
for (int k = 0; k < 4; k++) {
if (index != label[i + X[k]][j + X[k]])
copy.at<Vec3b>(i, j)[0] = copy.at<Vec3b>(i, j)[1] = copy.at<Vec3b>(i, j)[2] = 0;
}
}
}
imshow("超像素边界", copy);
}
vscode显示未定义标识符CV_Lab2BGR
问题原因:新版本中色彩空间转换的标识符已经改了,但是文档似乎还没更新。
解决方法:把 CV_BGR2Lab 改成 COLOR_BGR2Lab 即可。
结果:不报错。
可改进的点
1.撒种子步骤,原来是根据图像大小和超像素数目均匀撒的。
改:在初始种子点的n*n(一般n取3)个邻域内寻找更优的像素进行撒种子——计算邻域内所有像素的梯度值,把梯度值最小的像素点设置为新的超像素种子点——避免种子点落入轮廓或边界上
2.更新种子点步骤,原来是在updaye_clusters函数中根据当前超像素的所有归属像素来更新位置。
改:迭代引入滤波——去除超像素归属范围内与中心点在颜色空间上差异过大的像素点,用剩下的像素点更新聚类中心
3.SLIC的多次迭代中,对每一块超像素都进行迭代。
改:有些超像素块在迭代多次后变化不大了,所以可以设置一个准则,即本次迭代后的效果与上一次差别不大,则之后就不对此区域进行迭代。nChanges会在迭代过程中变化 ,如果nChanges小于阈值 则说明当前的超像素块 与 上一次迭代后变化不大 则直接跳出本次迭代
文章:Compact Watershed and Preemptive SLIC: On improving trade-offs of superpixel segmentation algorithms
double preemptive_thresh_iteration = 0.01; //设置的迭代阈值
if(nChanges<preemptive_thresh_iteration*sz)
break;