机动目标跟踪——匀加速运动模型(一维)
机动目标跟踪——目标模型概述(一维)
原创不易,路过的各位大佬请点个赞
WX: ZB823618313
机动目标跟踪——目标模型概述
- 机动目标跟踪——目标模型概述(一维)
-
- 1. 对机动目标跟踪的理解
- 2. 目标模型概述
- 4. 连续匀加速运动CA模型
- 5. 离散匀加速运动CA模型
- 6. 匀加速运动CA模型Matlab实现
- 7. 卡尔曼和扩展卡尔曼滤波实现一维目标跟踪
- 8. 其它模型见另一个博客
1. 对机动目标跟踪的理解
机动目标跟踪一直是目标跟踪领域研究的难点和重点问题。建立目标运动模型和滤波算法是目标跟踪的两个重要因素。由于目标的机动具有不可预测性,使得我们很难建立精确的目标运动模型。如何建立一种有效的模型来反映目标真实的运动轨迹是高机动目标跟踪系统急需解决的问题。经过近三十年的研究,该领域取得了许多重要成果。
个人理解:机动目标跟踪拥有三要素:
被跟踪目标建模(也是本博客重点)
传感器测量(另一个博客介绍)
滤波器设计(见目标跟踪专栏)
从算法层面,在目标跟踪系统中,常用的滤波算法是以卡尔曼滤波器为基本框架的估计算法。卡尔曼滤波器是一种线性、无偏、以误差均方差最小为准则的最优估计算法,它有精确的数学形式和优良的使用效能。卡尔曼滤波方法实质上是一种数据处理方法,它采用递推滤波方法,根据获取的量测数据由递推方程递推给出新的状态估计。由于计算量和存储量小,比较容易满足实时计算的要求,在工程实践中得到广泛应用。
除此之外,非线性滤波也广泛应用与机动目标跟踪,比如:
扩展卡尔曼滤波EKF
无迹卡尔曼滤波UKF
容积卡尔曼滤波CKF
求积卡尔曼滤波QKF
中心差分卡尔曼滤波CDKF
Divided difference filter DDF
高斯混合滤波GSF
强跟踪滤波STF
粒子滤波PF
… …
2. 目标模型概述
机动目标模型描述了目标状态随着时间变化的过程。一个好的模型抵得上大量的数据。当前几乎所有的目标跟踪算法都是基于模型进行状态估计的。在卡尔曼滤波器被引入目标跟踪领域后,基于状态空间的机动目标建模成为主要研究对象之一。
目标的空间运动基于不同的运动轨迹和坐标系
一维运动
二维运动
三维运动根据不同方向的运动是否相关
坐标间不耦合模型
坐标间耦合模型
坐标间不耦合模型: 这类模型假设三维空间三个正交方向上的目标机动过程不耦合。目标机动是飞行器受到外力作用而使得加速度变化所致,所以对机动建模的难点在于对目标加速度的描述。对于无机动目标,常速(Constant Velocity,CV〉模型常用于描述这类目标的运动,而常加速度(Constant Acceleration,CA)模型则常用于描述加速度趋近常数的机动目标的运动。
坐标间耦合模型: 坐标间耦合模型绝大多数情况下指的是转弯运动模型。由于此类模型与坐标密切相关,所以可以分为两类:二维转弯模型和三维转弯模型。二维转弯模型又称为平面转弯模型,即CT模型。
下面讲机动目标不同的模型:
4. 连续匀加速运动CA模型
匀加速(CA)模型用来匹配目标做匀加速直线运动时的清况,加速度的变化率为0。同上面的CV模型中所述一样,加速度绝不可能是精确的常数,它的轻微变化可以用均值为零,方差为q的高斯白噪声来建模:
d X ¨ ( t ) = W ( t ) d\ddot{X}(t)=W(t) dX¨(t)=W(t)
一维匀加速运动模型(连续):
目标状态为:位置和速度和加速度、即 X = [ x , x ˙ , x ¨ ] T {X}=[x, \dot{x}, \ddot{x}]^T X=[x,x˙,x¨]T
CA模型为
X ˙ ( t ) = [ 0 1 0 0 0 1 0 0 0 ] X ( t ) + [ 0 0 1 ] W ( t ) \dot{X}(t)=\begin{bmatrix}0&1&0\\0&0&1\\0&0&0\end{bmatrix}X(t) + \begin{bmatrix}0\\0\\1\end{bmatrix}W(t) X˙(t)=⎣⎡000100010⎦⎤X(t)+⎣⎡001⎦⎤W(t)
5. 离散匀加速运动CA模型
同CV模型一样,对其进行间隔为T的离散采样,转化为离散时间状态方程为:
一维匀加速运动模型(离散):
X k + 1 = [ 1 T T 2 / 2 0 1 T 0 0 1 ] X k + [ T 2 / 2 T 1 ] W k X_{k+1}=\begin{bmatrix}1&T&T^2/2\\0&1&T\\0&0&1\end{bmatrix}X_{k} + \begin{bmatrix}T^2/2\\T\\1\end{bmatrix}W_k Xk+1=⎣⎡100T10T2/2T1⎦⎤Xk+⎣⎡T2/2T1⎦⎤Wk
T T T为采样时间。
为了方便,定义如下矩阵;
A = [ 0 1 0 0 0 1 0 0 0 ] , B = [ 0 0 1 ] A=\begin{bmatrix}0&1&0\\0&0&1\\0&0&0\end{bmatrix}, B= \begin{bmatrix}0\\0\\1\end{bmatrix} A=⎣⎡000100010⎦⎤,B=⎣⎡001⎦⎤
F = [ 1 T T 2 / 2 0 1 T 0 0 1 ] , G = [ T 2 / 2 T 1 ] F=\begin{bmatrix}1&T&T^2/2\\0&1&T\\0&0&1\end{bmatrix}, G= \begin{bmatrix}T^2/2\\T\\1\end{bmatrix} F=⎣⎡100T10T2/2T1⎦⎤,G=⎣⎡T2/2T1⎦⎤
6. 匀加速运动CA模型Matlab实现
位置轨迹: 图1
速度轨迹: 图2
加速度轨迹: 图3



代码:
%% 一维匀加速CA运动目标轨迹
clc;
clear all;
close all;
n=3; % state dimension : 3
T=1; % sample time.
N=100; %the runs atime,跟踪总时长
w_mu=[0]';
%% target model
q=3; % 目标运动学标准差,过程噪声
Qk=q^2*eye(1);% cov. of process noise
% state matrix
Fk= [1 T T^2/2
0 1 T
0 0 1]; %
Gk= [ T^2/2
T
1]; %
%
%% define parameter
sV=zeros(n,N,1,1); % state
x=[1000,200,10]';
P_0=diag([1e5,10^2, 10^1]);
x0=mvnrnd(x,P_0); % 初始状态
%x0=(x+normrnd(0,0.001)')';
x=x0';
for k=1:N
%% %%%%%%% target model %%%%%%%%%%%%%%%%%%%%
%% 目标运动学模型(被跟踪目标建模),匀速运动CV模型
w=mvnrnd(w_mu',Qk)';%过程噪声方差
x=Fk*x+Gk*w;
sV(:,k,1,1)=x;
end
% 一维匀速CV运动目标轨迹
ii=1:N;
%
figure
plot(ii,sV(1,:,1,1),'-*r','LineWidth',1)
grid on
xlabel('时间(s)');ylabel('m');
legend('真实轨迹')
title('一维维匀速运动目标轨迹(位置)')
figure
plot(ii,sV(2,:,1,1),'-*b','LineWidth',1)
grid on
xlabel('时间(s)');ylabel('m/s');
legend('真实轨迹')
title('一维维匀速运动目标轨迹(速度)')
figure
plot(ii,sV(3,:,1,1),'-*g','LineWidth',1)
grid on
xlabel('时间(s)');ylabel('m/s^2');
legend('真实轨迹')
title('一维维匀速运动目标轨迹(加速度)')
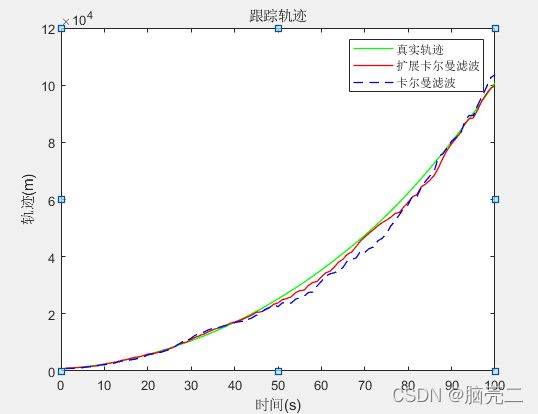
7. 卡尔曼和扩展卡尔曼滤波实现一维目标跟踪
算法:卡尔曼滤波、扩展卡尔曼滤波
传感器:雷达
跟踪轨迹图下图所示:
8. 其它模型见另一个博客
原创不易,路过的各位大佬请点个赞