Pytorch实现InceptionV4模型
Pytorch实现InceptionV4模型
- 模型简介
- split-transform-merge模型
- InceptionV4的基本模块及源码
-
- 卷积模块
- InceptionA模块
- InceptionB模块
- InceptionC模块
- ReductionA模块
- ReductionB模块
- Stem模块
- InceptionV4模型及源码
- 完整源码
模型简介
论文链接:https://arxiv.org/pdf/1602.07261.pdf
模型提出时间:2016年
split-transform-merge模型
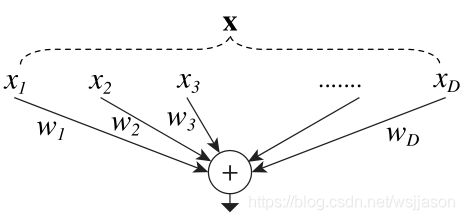
split-transform-merge模型即“分离-变换-合并”模型,顾名思义,该模型包括分离、变换和合并三步。
神经网络中的单个神经元(perceptron)就是最简单的split-transform-merge模型,其工作过程包括:将输入矢量x=[x1,x2,…,xD]分离为D个数值(split),各维矢量值与权值相乘(transform),累加求和(merge)。
 Inception系列的模型均属于split-transform-merge模型,其工作过程包括:将输入图片分为多个通道进行处理(split),各通道内的卷积、池化变换(transform),各通道的输出叠加得到最终输出(merge)。
Inception系列的模型均属于split-transform-merge模型,其工作过程包括:将输入图片分为多个通道进行处理(split),各通道内的卷积、池化变换(transform),各通道的输出叠加得到最终输出(merge)。 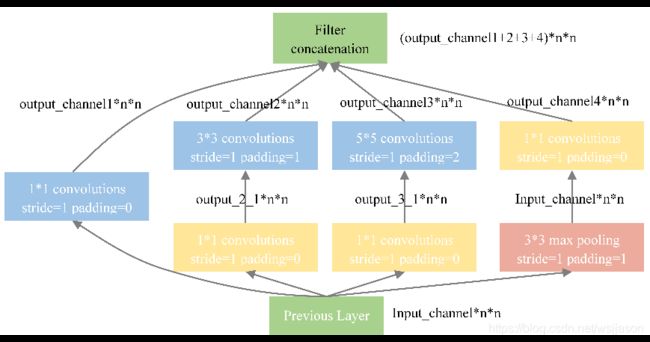
InceptionV4的基本模块及源码
卷积模块
InceptionV4的所有卷积模块均有三部分构成:卷积、批标准化和激活。模型中一共包含了三类卷积核:第一类卷积核stride=2且padding=0,功能是压缩图片的大小;第二类卷积核stride=1且padding=⌊kernelsize/2⌋,功能是提取特征但不改变图片的大小;第三类卷积核是非对称卷积核,kernelsize=(x,y),stride=1且padding=(⌊x/2⌋,⌊y/2⌋),功能是提取特征但不改变图片的大小。下文中三类卷积核分别由红色、绿色和蓝色标注,源码如下:
# 卷积核1:stride=2,padding=0
def Conv1(input_channel, output_channel, kernel_size):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, kernel_size, stride=2, padding=0),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace = True)
)
# 卷积核2:对称卷积核,stride=1, padding=kernel_size//2
def Conv2(input_channel, output_channel, kernel_size):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, kernel_size, stride=1, padding=kernel_size//2),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True)
)
# 卷积核3:非对称卷积核,kernel_size=(kernel_size1, kernel_size2),
# stride=1,padding=(kernel_size1//2, kernel_size2//2)
def Conv3(input_channel, output_channel, kernel_size1, kernel_size2):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, kernel_size=(kernel_size1, kernel_size2),
stride=1, padding=(kernel_size1//2, kernel_size2//2)),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace = True)
)
InceptionA模块
InceptionA模块的源码如下:# InceptionA
class InceptionA(nn.Module):
def __init__(self, input_channel):
super(InceptionA, self).__init__()
self.block1 = nn.Sequential(
nn.AvgPool2d(kernel_size=3, stride=1, padding=1),
Conv2(input_channel, 96, 1)
)
self.block2 = Conv2(input_channel, 96, 1)
self.block3 = nn.Sequential(
Conv2(input_channel, 64, 1),
Conv2(64, 96, 3)
)
self.block4 = nn.Sequential(
Conv2(input_channel, 64, 1),
Conv2(64, 96, 3),
Conv2(96, 96, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x4 = self.block4(x)
x = torch.cat([x1, x2, x3, x4], dim=1)
return x
InceptionB模块
InceptionB模块的源码如下:# InceptionB
class InceptionB(nn.Module):
def __init__(self, input_channel):
super(InceptionB, self).__init__()
self.block1 = nn.Sequential(
nn.AvgPool2d(kernel_size=3, stride=1, padding=1),
Conv2(input_channel, 128, 1)
)
self.block2 = Conv2(input_channel, 384, 1)
self.block3 = nn.Sequential(
Conv2(input_channel, 192, 1),
Conv3(192, 224, 1, 7),
Conv3(224, 256, 1, 7)
)
self.block4 = nn.Sequential(
Conv2(input_channel, 192, 1),
Conv3(192, 192, 1, 7),
Conv3(192, 224, 7, 1),
Conv3(224, 224, 1, 7),
Conv3(224, 256, 7, 1)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x4 = self.block4(x)
x = torch.cat([x1, x2, x3, x4], dim=1)
return x
InceptionC模块
InceptionC模块的源码如下:# InceptionC
class InceptionC(nn.Module):
def __init__(self, input_channel):
super(InceptionC, self).__init__()
self.block1 = nn.Sequential(
nn.AvgPool2d(kernel_size=3, stride=1, padding=1),
Conv2(input_channel, 256, 1)
)
self.block2 = Conv2(input_channel, 256, 1)
self.block3 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 256, 1, 3)
)
self.block4 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 256, 3, 1)
)
self.block5 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 448, 1, 3),
Conv3(448, 512, 3, 1),
Conv3(512, 256, 3, 1)
)
self.block6 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 448, 1, 3),
Conv3(448, 512, 3, 1),
Conv3(512, 256, 1, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x4 = self.block4(x)
x5 = self.block5(x)
x6 = self.block6(x)
x = torch.cat([x1, x2, x3, x4, x5, x6], dim=1)
return x
ReductionA模块
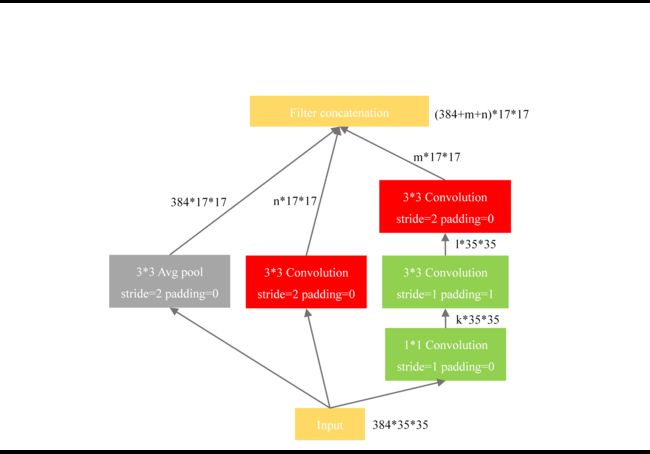 ReductionA模块的源码如下:
ReductionA模块的源码如下:
# ReductionA:将35*35的图片降维至17*17
class ReductionA(nn.Module):
def __init__(self, input_channel, k, l, m, n):
super(ReductionA, self).__init__()
self.block1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
self.block2 = Conv1(input_channel, n, 3)
self.block3 = nn.Sequential(
Conv2(input_channel, k, 1),
Conv2(k, l, 3),
Conv1(l, m, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x = torch.cat([x1, x2, x3], dim=1)
return x
ReductionB模块
ReductionB模块的源码如下:# ReductionB:将17*17的图片降维至8*8
class ReductionB(nn.Module):
def __init__(self, input_channel):
super(ReductionB, self).__init__()
self.block1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
self.blocl2 = nn.Sequential(
Conv2(input_channel, 192, 1),
Conv1(192, 192, 3)
)
self.block3 = nn.Sequential(
Conv2(input_channel, 256, 1),
Conv3(256, 256, 1, 7),
Conv3(256, 320, 7, 1),
Conv1(320, 320, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x = torch.cat([x1, x2, x3], dim=1)
return x
Stem模块
Stem模块的源码如下:# Stem
class Stem(nn.Module):
def __init__(self):
super(Stem, self).__init__()
self.block1 = nn.Sequential(
Conv1(3, 32, 3),
nn.Conv2d(32, 32, 3, stride=1, padding=0),
nn.BatchNorm2d(32),
nn.ReLU(),
Conv2(32, 64, 3)
)
self.block2_1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
self.block2_2 = nn.Sequential(
Conv1(64, 96, 3)
)
self.block3_1 = nn.Sequential(
Conv2(160, 64, 1),
nn.Conv2d(160, 96, 3, stride=1, padding=0),
nn.BatchNorm2d(96),
nn.ReLU()
)
self.block3_2 = nn.Sequential(
Conv2(160, 64, 1),
Conv3(64, 64, 7, 1),
Conv3(64, 64, 1, 7),
nn.Conv2d(64, 96, 3, stride=1, padding=0),
nn.BatchNorm2d(96),
nn.ReLU()
)
self.block4_1 = Conv1(192, 192, 3)
self.block4_2 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
def forward(self, x):
x = self.block1(x)
x1 = self.block2_1(x)
x2 = self.block2_2(x)
x = torch.cat([x1, x2], dim=1)
x1 = self.block3_1(x)
x2 = self.block3_2(x)
x = torch.cat([x1, x2], dim=1)
x1 = self.block4_1(x)
x2 = self.block4_2(x)
x = torch.cat([x1, x2], dim=1)
return x
InceptionV4模型及源码
IncpetionV4模型由第三部分的基本模块构成,其结构如下图所示:
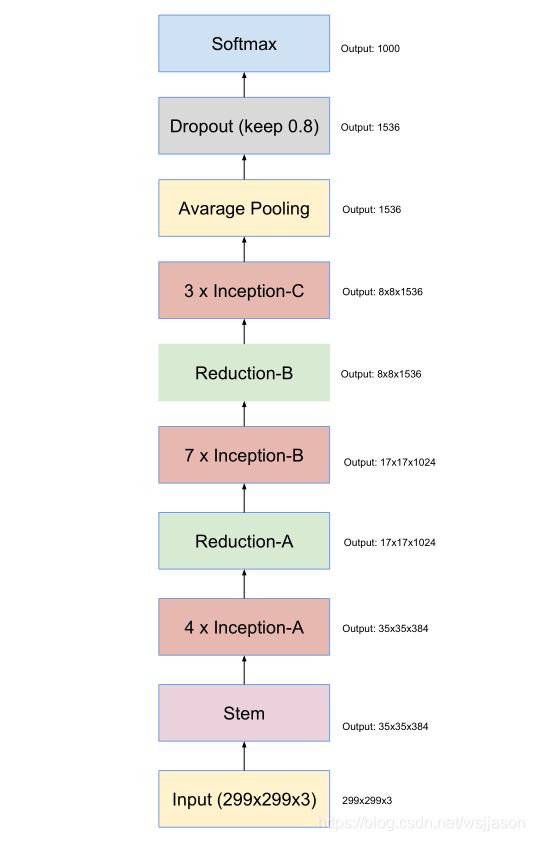 IncpetionV4模型的源码如下:
IncpetionV4模型的源码如下:
# InceptionV4 Network
class InceptionV4(nn.Module):
def __init__(self):
super(InceptionV4, self).__init__()
self.block1 = Stem()
self.block2 = nn.Sequential(
InceptionA(384),
InceptionA(384),
InceptionA(384),
InceptionA(384)
)
self.block3 = ReductionA(384, 192, 224, 256, 384)
self.block4 = nn.Sequential(
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024)
)
self.block5 = ReductionB(1024)
self.block6 = nn.Sequential(
InceptionC(1536),
InceptionC(1536),
InceptionC(1536),
)
self.block7 = nn.Sequential(
nn.AvgPool2d(kernel_size=8),
nn.Dropout(p=0.8)
)
self.linear = nn.Linear(1536,1000)
def forward(self, x):
x = self.block1(x)
x = self.block2(x)
x = self.block3(x)
x = self.block4(x)
x = self.block5(x)
x = self.block6(x)
x = self.block7(x)
x = x.view(x.size(0), -1)
x = self.linear(x)
return x
完整源码
import torch
import torch.nn as nn
'''Inception V4 model'''
# 卷积核1:stride=2,padding=0
def Conv1(input_channel, output_channel, kernel_size):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, kernel_size, stride=2, padding=0),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace = True)
)
# 卷积核2:对称卷积核,stride=1, padding=kernel_size//2
def Conv2(input_channel, output_channel, kernel_size):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, kernel_size, stride=1, padding=kernel_size//2),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace=True)
)
# 卷积核3:非对称卷积核,kernel_size=(kernel_size1, kernel_size2),
# stride=1,padding=(kernel_size1//2, kernel_size2//2)
def Conv3(input_channel, output_channel, kernel_size1, kernel_size2):
return nn.Sequential(
nn.Conv2d(input_channel, output_channel, kernel_size=(kernel_size1, kernel_size2),
stride=1, padding=(kernel_size1//2, kernel_size2//2)),
nn.BatchNorm2d(output_channel),
nn.ReLU(inplace = True)
)
# InceptionA
class InceptionA(nn.Module):
def __init__(self, input_channel):
super(InceptionA, self).__init__()
self.block1 = nn.Sequential(
nn.AvgPool2d(kernel_size=3, stride=1, padding=1),
Conv2(input_channel, 96, 1)
)
self.block2 = Conv2(input_channel, 96, 1)
self.block3 = nn.Sequential(
Conv2(input_channel, 64, 1),
Conv2(64, 96, 3)
)
self.block4 = nn.Sequential(
Conv2(input_channel, 64, 1),
Conv2(64, 96, 3),
Conv2(96, 96, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x4 = self.block4(x)
x = torch.cat([x1, x2, x3, x4], dim=1)
return x
# InceptionB
class InceptionB(nn.Module):
def __init__(self, input_channel):
super(InceptionB, self).__init__()
self.block1 = nn.Sequential(
nn.AvgPool2d(kernel_size=3, stride=1, padding=1),
Conv2(input_channel, 128, 1)
)
self.block2 = Conv2(input_channel, 384, 1)
self.block3 = nn.Sequential(
Conv2(input_channel, 192, 1),
Conv3(192, 224, 1, 7),
Conv3(224, 256, 1, 7)
)
self.block4 = nn.Sequential(
Conv2(input_channel, 192, 1),
Conv3(192, 192, 1, 7),
Conv3(192, 224, 7, 1),
Conv3(224, 224, 1, 7),
Conv3(224, 256, 7, 1)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x4 = self.block4(x)
x = torch.cat([x1, x2, x3, x4], dim=1)
return x
# InceptionC
class InceptionC(nn.Module):
def __init__(self, input_channel):
super(InceptionC, self).__init__()
self.block1 = nn.Sequential(
nn.AvgPool2d(kernel_size=3, stride=1, padding=1),
Conv2(input_channel, 256, 1)
)
self.block2 = Conv2(input_channel, 256, 1)
self.block3 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 256, 1, 3)
)
self.block4 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 256, 3, 1)
)
self.block5 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 448, 1, 3),
Conv3(448, 512, 3, 1),
Conv3(512, 256, 3, 1)
)
self.block6 = nn.Sequential(
Conv2(input_channel, 384, 1),
Conv3(384, 448, 1, 3),
Conv3(448, 512, 3, 1),
Conv3(512, 256, 1, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x4 = self.block4(x)
x5 = self.block5(x)
x6 = self.block6(x)
x = torch.cat([x1, x2, x3, x4, x5, x6], dim=1)
return x
# ReductionA:将35*35的图片降维至17*17
class ReductionA(nn.Module):
def __init__(self, input_channel, k, l, m, n):
super(ReductionA, self).__init__()
self.block1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
self.block2 = Conv1(input_channel, n, 3)
self.block3 = nn.Sequential(
Conv2(input_channel, k, 1),
Conv2(k, l, 3),
Conv1(l, m, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x = torch.cat([x1, x2, x3], dim=1)
return x
# ReductionB:将17*17的图片降维至8*8
class ReductionB(nn.Module):
def __init__(self, input_channel):
super(ReductionB, self).__init__()
self.block1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
self.blocl2 = nn.Sequential(
Conv2(input_channel, 192, 1),
Conv1(192, 192, 3)
)
self.block3 = nn.Sequential(
Conv2(input_channel, 256, 1),
Conv3(256, 256, 1, 7),
Conv3(256, 320, 7, 1),
Conv1(320, 320, 3)
)
def forward(self, x):
x1 = self.block1(x)
x2 = self.block2(x)
x3 = self.block3(x)
x = torch.cat([x1, x2, x3], dim=1)
return x
# Stem
class Stem(nn.Module):
def __init__(self):
super(Stem, self).__init__()
self.block1 = nn.Sequential(
Conv1(3, 32, 3),
nn.Conv2d(32, 32, 3, stride=1, padding=0),
nn.BatchNorm2d(32),
nn.ReLU(),
Conv2(32, 64, 3)
)
self.block2_1 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
self.block2_2 = nn.Sequential(
Conv1(64, 96, 3)
)
self.block3_1 = nn.Sequential(
Conv2(160, 64, 1),
nn.Conv2d(160, 96, 3, stride=1, padding=0),
nn.BatchNorm2d(96),
nn.ReLU()
)
self.block3_2 = nn.Sequential(
Conv2(160, 64, 1),
Conv3(64, 64, 7, 1),
Conv3(64, 64, 1, 7),
nn.Conv2d(64, 96, 3, stride=1, padding=0),
nn.BatchNorm2d(96),
nn.ReLU()
)
self.block4_1 = Conv1(192, 192, 3)
self.block4_2 = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)
def forward(self, x):
x = self.block1(x)
x1 = self.block2_1(x)
x2 = self.block2_2(x)
x = torch.cat([x1, x2], dim=1)
x1 = self.block3_1(x)
x2 = self.block3_2(x)
x = torch.cat([x1, x2], dim=1)
x1 = self.block4_1(x)
x2 = self.block4_2(x)
x = torch.cat([x1, x2], dim=1)
return x
# InceptionV4 Network
class InceptionV4(nn.Module):
def __init__(self):
super(InceptionV4, self).__init__()
self.block1 = Stem()
self.block2 = nn.Sequential(
InceptionA(384),
InceptionA(384),
InceptionA(384),
InceptionA(384)
)
self.block3 = ReductionA(384, 192, 224, 256, 384)
self.block4 = nn.Sequential(
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024),
InceptionB(1024)
)
self.block5 = ReductionB(1024)
self.block6 = nn.Sequential(
InceptionC(1536),
InceptionC(1536),
InceptionC(1536),
)
self.block7 = nn.Sequential(
nn.AvgPool2d(kernel_size=8),
nn.Dropout(p=0.8)
)
self.linear = nn.Linear(1536,1000)
def forward(self, x):
x = self.block1(x)
x = self.block2(x)
x = self.block3(x)
x = self.block4(x)
x = self.block5(x)
x = self.block6(x)
x = self.block7(x)
x = x.view(x.size(0), -1)
x = self.linear(x)
return x