pytorch入门day5-卷积神经网络实战
目录
LeNet网络实战
ResNet
训练函数
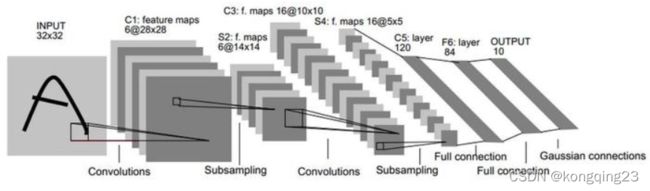
LeNet网络实战
import torch
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision import transforms
from torch import nn
from lenet5 import Lenet5
from torch import optim
def main():
batch_size=32
cifar_train=datasets.CIFAR10('cifar',True,transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor()
]),download=True)
cifar_train=DataLoader(cifar_train,batch_size=batch_size,shuffle=True)
cifar_test = datasets.CIFAR10('cifar', False, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor()
]), download=True)
cifar_test = DataLoader(cifar_train, batch_size=batch_size, shuffle=True)
x,label=iter(cifar_train).next()
print('x:', x.shape, 'label:', label.shape)
model.train()
device = torch.device('cuda')
model = Lenet5().to(device)
# CrossEntropyLoss进行交叉熵运算(包括了softmax计算),判断多分类问题中预测试与真实值的差距
criteon = nn.CrossEntropyLoss().to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
print(model)
for epoch in range(1000):
for batchidx,(x,label) in enumerate(cifar_train):
# x [b, 3, 32, 32]
# label [b]
x, label = x.to(device), label.to(device)
logits=model(x)
# logits: [b, 10]
# label: [b]
# loss: tensor scalar
loss = criteon(logits, label)
# backprop
#先将梯度清零,再进行反向传播,再进行梯度更新
optimizer.zero_grad()
loss.backward()
optimizer.step()
if epoch % 10 == 0:
print('epoch {}: loss = {}'
.format(epoch, loss.item()))
model.eval()
#在测试集内 不需要跟踪反向梯度计算
with torch.no_grad():
total_correct=0
total_num=0
for x,label in cifar_test:
x,label=x.to(device),label.to(device)
logits=model(x)
pred=logits.argmax(dim=1)
correct=torch.eq(pred,label).float().sum().item()#eq函数调用后会返回一个byte,true或者false估计,然后需要将其转换成float类型再通过item()函数来提取它的值
total_correct+=correct
total_num+=x.size(0)
acc = total_correct / total_num
print(epoch, 'test acc:', acc)
if __name__ == '__main__':
main()
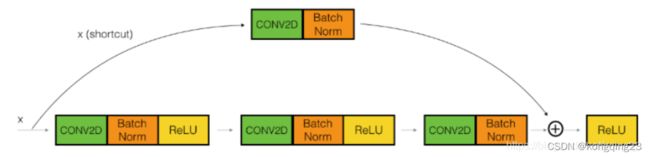
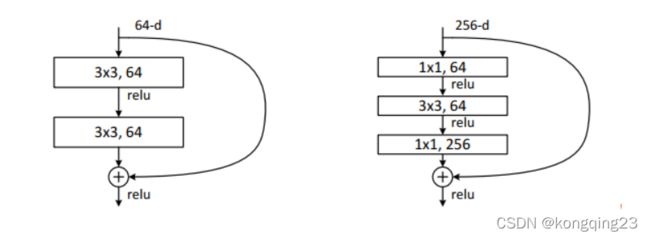
ResNet
import torch
from torch import nn
from torch.nn import functional as F
class ResBlk(nn.Module):
"""
残差网络块
"""
def __init__(self,ch_in,ch_out,stride=1):
super(ResBlk,self).__init__()
self.conv1=nn.Conv2d(ch_in,ch_out,kernel_size=3,stride=stride,padding=1)
self.bn1=nn.BatchNorm2d(ch_out)
self.conv2 = nn.Conv2d(ch_out, ch_out, kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm2d(ch_out)
self.extra=nn.Sequential()
if ch_out!=ch_in:
#[b, ch_in, h, w] => [b, ch_out, h, w]
self.extra=nn.Sequential(
nn.Conv2d(ch_in,ch_out,kernel_size=1,stride=stride),
nn.BatchNorm2d(ch_out)
)
def forward(self,x):
"""
:param x: [b, ch, h, w]
"""
out=F.relu(self.bn1(self.conv1(x)))
out=self.bn2(self.conv2(out))
#短接
# extra module: [b, ch_in, h, w] => [b, ch_out, h, w] 保证能够进行残差计算
out = self.extra(x) + out
out = F.relu(out)
return out
class ResNet18(nn.Module):
def __init__(self):
super(ResNet18, self).__init__()
self.conv1=nn.Sequential(
nn.Conv2d(3,64,kernel_size=3,stride=3,padding=1),
nn.BatchNorm2d(64)
)
#紧跟着设置4个残差块
# [b, 64, h, w] => [b, 128, h ,w]
self.blk1=ResBlk(64,128,stride=2)
# [b, 128, h, w] => [b, 256, h, w]
self.blk2=ResBlk(128,256,stride=2)
# [b, 256, h, w] => [b, 512, h, w]
self.blk3 = ResBlk(256, 512, stride=2)
# [b, 512, h, w] => [b, 512, h, w]
self.blk4 = ResBlk(512, 512, stride=2)
self.outlayer = nn.Linear(512 * 1 * 1, 10)
def forward(self,x):
x=F.relu(self.conv1(x))
# [b, 64, h, w] => [b, 1024, h, w]
x = self.blk1(x)
x = self.blk2(x)
x = self.blk3(x)
x = self.blk4(x)
# print('after conv:', x.shape)#[2, 512, 1, 1]
x = F.adaptive_avg_pool2d(x, [1, 1])
# print('after pool:', x.shape)
x = x.view(x.size(0), -1)
x = self.outlayer(x)
return x
def main():
blk = ResBlk(64, 128, stride=2)
tmp = torch.randn(2, 64, 32, 32)
out = blk(tmp)
print('block:', out.shape)
x = torch.randn(2, 3, 32, 32)
model = ResNet18()
out = model(x)
print('resnet:', out.shape)
if __name__ == '__main__':
main()
训练函数
import torch
from torch.utils.data import DataLoader
from torchvision import datasets
from torchvision import transforms
from torch import nn
from lenet5 import Lenet5
from torch import optim
from resnet import ResNet18
def main():
batch_size=32
cifar_train = datasets.CIFAR10('cifar', True, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
]), download=True)
cifar_train = DataLoader(cifar_train, batch_size=batch_size, shuffle=True)
cifar_test = datasets.CIFAR10('cifar', False, transform=transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=[0.485, 0.456, 0.406],
std=[0.229, 0.224, 0.225])
]), download=True)
cifar_test = DataLoader(cifar_test, batch_size=batch_size, shuffle=True)
x,label=iter(cifar_train).next()
print('x:', x.shape, 'label:', label.shape)
device = torch.device('cuda')
#model = Lenet5().to(device)
model = ResNet18().to(device)
# CrossEnmodel = Lenet5().to(device)tropyLoss进行交叉熵运算(包括了softmax计算),判断多分类问题中预测试与真实值的差距
criteon = nn.CrossEntropyLoss().to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
print(model)
model.train()
for epoch in range(1000):
for batchidx,(x,label) in enumerate(cifar_train):
# x [b, 3, 32, 32]
# label [b]
x, label = x.to(device), label.to(device)
logits=model(x)
# logits: [b, 10]
# label: [b]
# loss: tensor scalar
loss = criteon(logits, label)
# backprop
#先将梯度清零,再进行反向传播,再进行梯度更新
optimizer.zero_grad()
loss.backward()
optimizer.step()
if epoch % 10 == 0:
print('epoch {}: loss = {}'
.format(epoch, loss.item()))
model.eval()
#在测试集内 不需要跟踪反向梯度计算
with torch.no_grad():
total_correct=0
total_num=0
for x, label in cifar_test:
x,label=x.to(device),label.to(device)
logits=model(x)
pred=logits.argmax(dim=1)
correct=torch.eq(pred,label).float().sum().item()#eq函数调用后会返回一个byte,true或者false估计,然后需要将其转换成float类型再通过item()函数来提取它的值
total_correct+=correct
total_num+=x.size(0)
acc = total_correct / total_num
if epoch % 10 == 0:
print('epoch {}: acc = {}'
.format(epoch, acc))
if __name__ == '__main__':
main()