自动控制原理——负反馈天线指向控制系统设计
-
题目
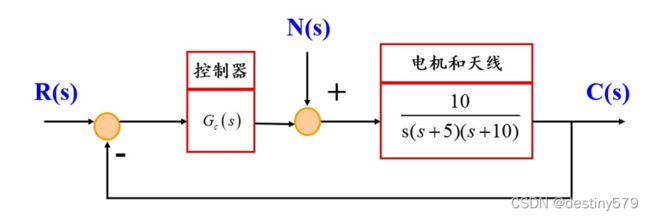
某大型天线可以用来接收卫星信号。为了能跟踪卫星的运动,必须保证天线的准确定向。天线指向控制系统采用电枢控制电机来驱动天线,其结构图如图 1 所示。
要求
(1) 当 Gc(s)=20 时,运用 MATLAB 绘制单位脉冲响应曲线;
(2) 当 Gc(s)=20 时,运用 MATLAB 绘制单位阶跃响应曲线,并求取其超调量、调节时间;
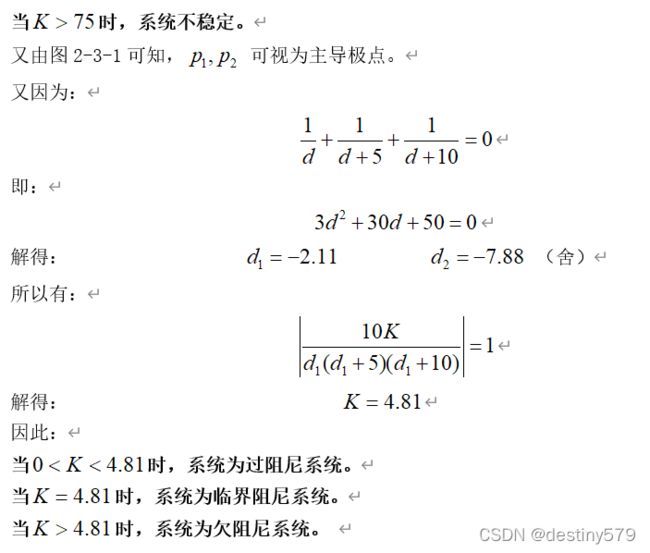
(3) 当 Gc(s)=K 时,运用根轨迹法,确定稳定、不稳定、过阻尼、临界阻尼、欠阻尼时 K 的取值范围;
(4) 当 Gc(s)=20 时,运用 MATLAB 绘制系统的 BODE 图,并获取幅值裕度、相角裕度以及对应的频率;
(5) 若要求系统斜坡响应的稳态误差小于 1%,阶跃响应的超调量小于 5%,调节时间小于 2s。设计合适的校正网络,并绘制校正后系统的单位阶跃响应曲线,并对比前后幅值裕度、相角裕度以及频率的变化情况;
(6) 当 R(s)=0 时,计算扰动 N(s)=1/s 对系统输出 C(s)的影响。
问题的求解 -
问题的求解
2.1. 问题(1)的求解
当 Gc(s)=20 时,系统的开环传递函数为:
系统的闭环传递函数为:
因为要绘制其单位脉冲响应曲线,编写MATLAB程序如下:
t=0:0.05:10;
num=[200]; den=[1 15 50 200];
figure
impulse(num,den,t); grid;
可得到其单位脉冲响应曲线如图2-1所示:
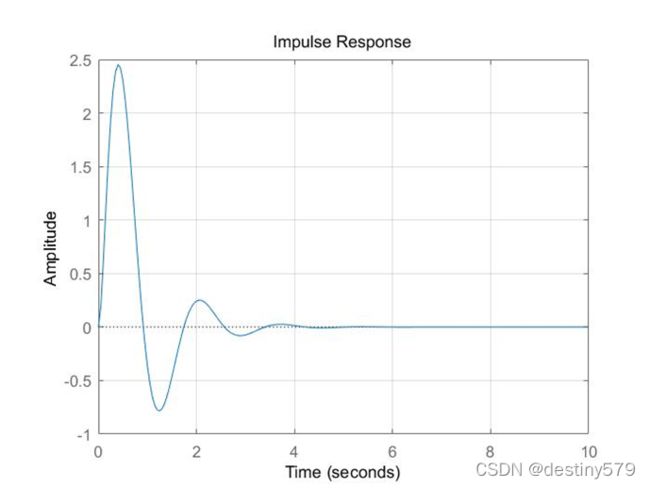
图2-1
2.2. 问题(2)的求解
系统开环、闭环传递函数如(1)中所示,因为要求绘制单位阶跃响应曲线,并求取其超调量、调节时间,编写MATLAB程序如下:
t=0:0.05:10;
num=[200]; den=[1 15 50 200];
figure
step(num,den,t); grid;
可得到其单位阶跃响应曲线如图2-2所示:
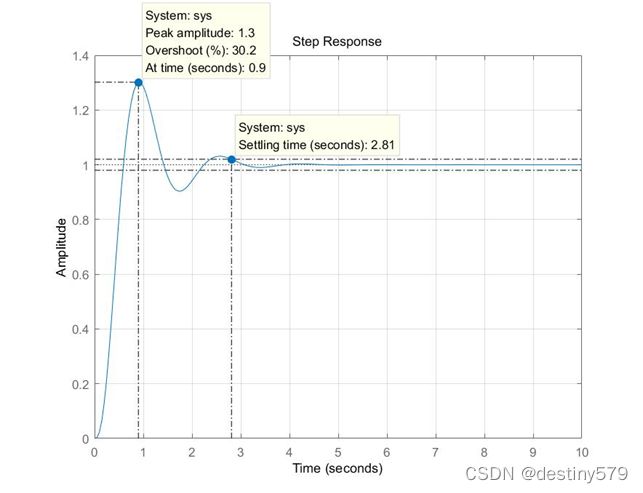 图2-2
图2-2
由图可得,其超调量为30.2%,调节时间为2.81s(Δ=2%)
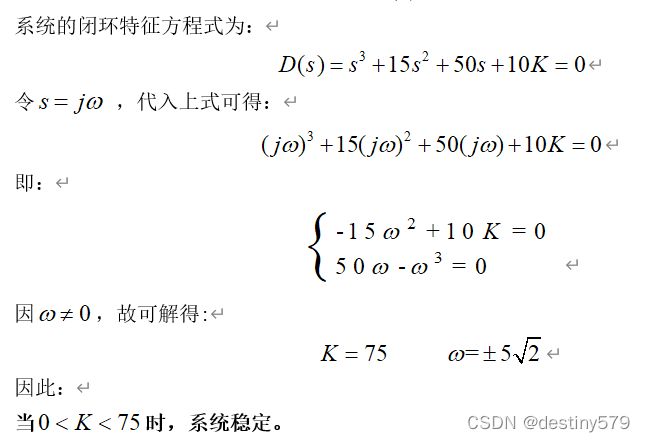
2.3. 问题(3)的求解
当 Gc(s)=K 时,系统的开环传递函数为:
![]()
所以可知:
![]()
编写MATLAB程序如下:
G=zpk([],[0 -5 -10],1);
figure
rlocus(G);
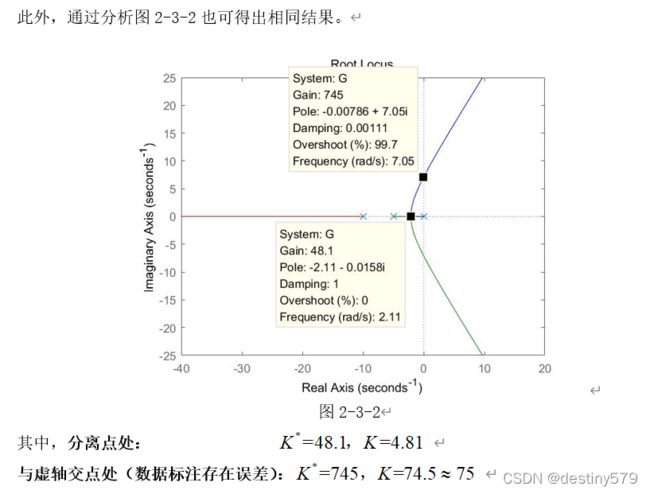
可得其根轨迹如图2-3-1所示:
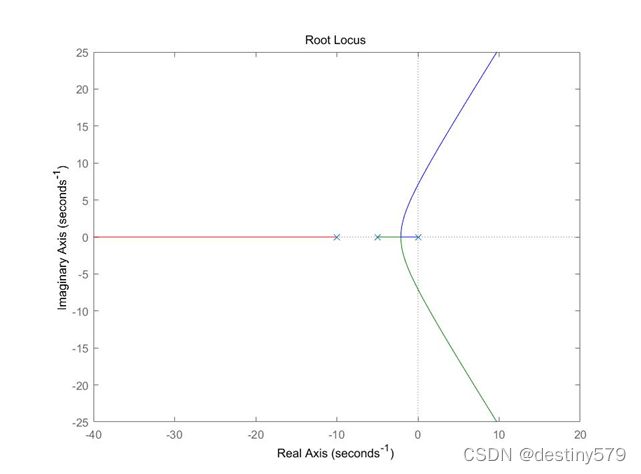 图2-3-1
图2-3-1
2.4. 问题(4)的求解
当 Gc(s)=20 时,系统的开环传递函数为:
![]()
编写MATLAB程序如下:
num=[200];
den=[1 15 50 0];
margin(num,den)
可得系统的BODE图如图2-4所示:
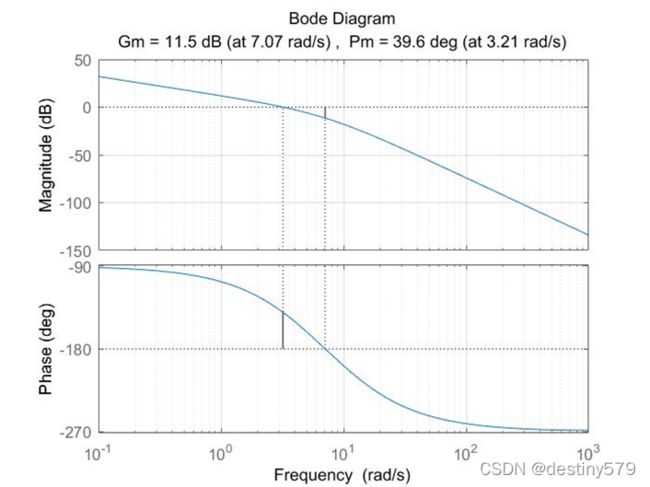
由图可得:
系统的幅值裕度为11.5dB,对应的穿越频率为7.07 rad/s;
系统的相角裕度为39.6°,对应的截止频率(剪切频率)为3.21rad/s。
2.5. 问题(5)的求解
因为对校正后系统的稳态性能和动态性能均有较高要求,因此选用超前-滞后网络校正。
选用如下超前-滞后校正网络:


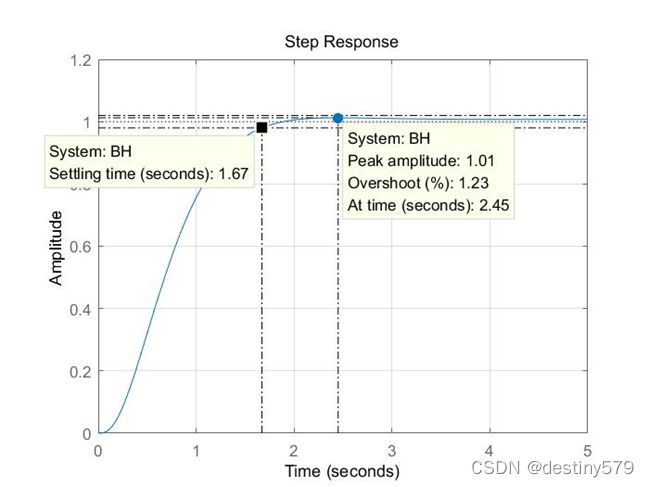
由图可知:
系统阶跃响应的超调量: (满足题目要求)
系统阶跃响应的调节时间: (满足题目要求)
编写MATLAB程序如下:
G0=tf(10,conv(conv([1,0],[1,5]),[1,10]));
Gc=tf(8*conv([1,0.01],[1,5.5]),conv([1,0.0001],[1,6.5]));
G=series(Gc,G0);
BH=feedback(G,1,-1);
margin(BH)
grid
可得校正后系统的BODE图如图2-5-2所示:
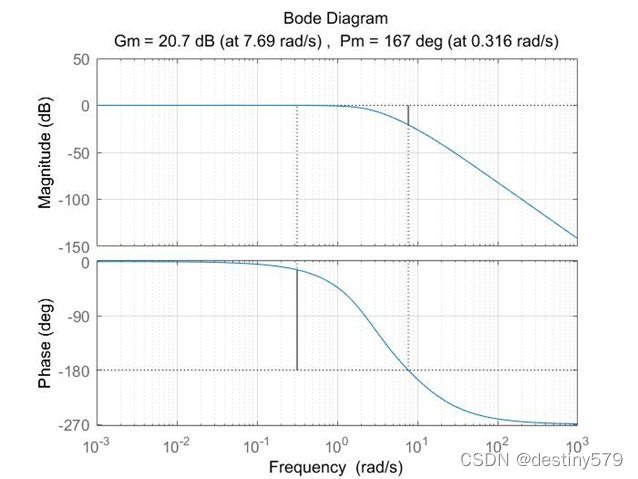
由图可得:
校正后系统的幅值裕度为20.7dB,对应的穿越频率为7.69 rad/s;
校正后系统的相角裕度为167°,对应的截止频率(剪切频率)为0.316rad/s。
对比校正前后,发现系统的幅值裕度和相角裕度增大,穿越频率增大,截止频率减小。
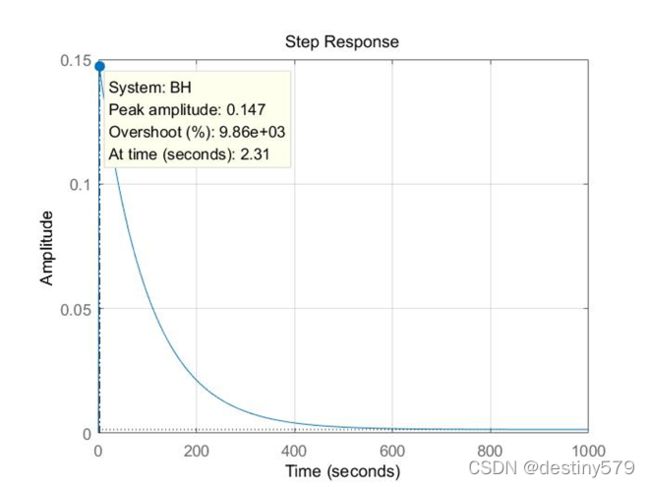

完整word文档可点击链接下载: