基于极值理论的单变量时间序列流式异常检测算法SPOT/DSPOT
论文标题:“Anomaly Detection in Streams with Extreme Value Theory”
GitHub - Amossys-team/SPOT: SPOT algorithm implementation (with variants) https://github.com/Amossys-team/SPOT
https://github.com/Amossys-team/SPOT
算法简介
SPOT是基于极值理论的流式数据异常检测算法。可用于单变量的流式数据异常检测,但是更常用于自动设置阈值(如OmniAnomaly就用该算法给异常分数设置阈值)。该算法通过拟合极值分布来计算指定概率下的极值,该极值被认为是判定异常的阈值。
该算法的优势主要在于:(1)无需对数据分布做出假设(如3Sigma模型的前提条件是数据符合高斯分布),因此算法更鲁棒,更适用于不断变化的流式数据。(2)阈值的自动调整,该算法能根据数据的变化自动调整阈值,无需手工设置。(3)原理简单易于实现,速度尚可(FluxEV算法基于SPOT进行了改进,速度有明显提升)(4)biSPOT和bidSPOT能够同时对异常大和异常小的值进行检测。
该算法的局限有:(1)仅适用于单变量的时间序列,不支持多变量。(2)对Concept Drift的适应能力有限,尽管DSPOT能够cover部分Concept Drift的情况,比起SPOT的适应能力好很多,但仍然很难适应复杂的产线环境。(3)算法初始化时需要用正常数据。(4)算法仍然有一些超参需要调节。
背景知识:极值理论
极值的概念:

极值zq要满足的条件是对于观察样本,大于它的概率小于q,q通常为一个很小的概率。这种极值为极大值,可作为异常大检测的阈值。
极值理论(EVT)认为虽然不同的事物本身符合不同的数据分布,但是不同事物的极端事件满足相同的分布,这个分布称为极值分布。而SPOT算法应用的是EVT第二理论,它认为极值相对于一个阈值超出的部分满足一种分布叫GPD:

GPD该数据分布模型有两个参数,γ和δ,这两个参数可以通过极大似然估计来获得。在SPOT算法中,t是一个固定值,为初始化数据的98%分位数,所有高于t的值且非异常的值被叫做peaks。SPOT算法认为这些peaks满足上述的GPD分布。一旦求出了这些peaks就可以用极大似然估计来确定GPD的两个参数。确定了GPD模型,就不难找到概率q对应的极值zq,而该极值即判断异常大的阈值。


SPOT算法原理
SPOT的步骤可以分为两步:
(1)calibration,或者叫初始化。根据已有的数据计算t和阈值Zq。
(2)流式更新阈值Zq,并把它当做决策边界判断异常。大于Zq的为异常,报出去;在t和zq之间的为peaks,用于更新GPD模型和Zq;小于t的为正常数据,不做处理

下面先介绍初始化步骤,再介绍SPOT算法的整个流程。
初始化
目标:We have n observations X1, . . .Xn, and we have fixed a risk q. The goal is to compute a first threshold zq verifying P(X > zq) < q.
做法: 设置一个较高的阈值t,超过t的都认为是peak,从而得到peaks set Yt,根据Yt拟合GPD,得到GPD的参数,然后就可以计算出阈值Zq。

流式异常检测
首先取前n个值做初始化得到t和阈值zq。
如果新来的值大于zq,那就被认为是异常值,放到异常集合A中(A作为最终的结果输出),异常值不更新模型。如果新来的值大于t,即real peak case,那就更新模型(GPD模型),得到新的zq。否则就是normal case。
同样的方法也可以去检测极小的异常。

DSPOT算法原理
SPOT的问题: 前提条件是数据分布不随时间变化。无法适应Concept Drift。

DSPOT的做法:用与局部平均M的相对值(上图的蓝和红)来代替原先的绝对值进行SPOT。该算法认为这个相对值的分布不随时间变化,即这个相对值满足SPOT的前提条件。
相对值的计算方式:
![]()
其中Mi is a moving average,它是最近的d个正常值(包含normal 和peak)的均值。 d是一个超参(窗长)
![]()
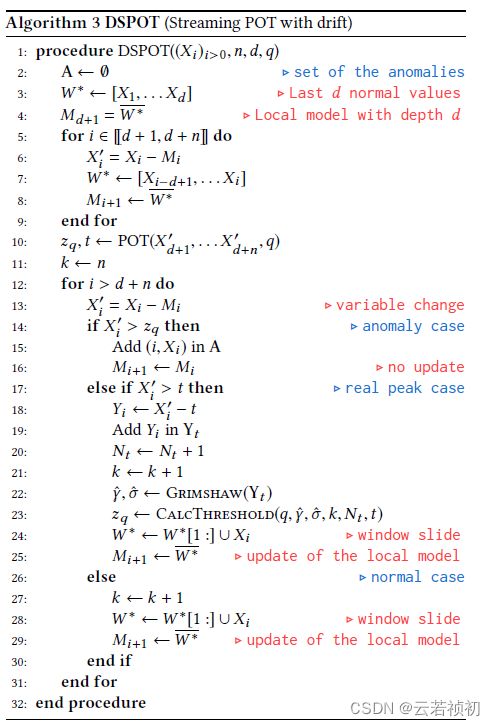
DSPOT算法流程
先取前d个数计算M(初始化M)
再取n个数计算相对值X', 拟合模型得到初始阈值zq(初始化阈值zq)
流式更新模型:如果新来的相对值大于zq,判断为异常,不更新模型(特指极值分布模型),不更新M值。如果新来的相对值是peak(大于t),更新模型,更新M;否则,只更新M,不更新模型。