深度学习记录第六篇————计算机视觉基础
计算机视觉基础
-
- 6.1卷积神经网络简介
- 6.2卷积层
-
- 6.2.1 卷积核
- 6.2.2步幅
- 6.2.3 填充
- 6.2.4 多通道上的卷积
- 6.2.5激活函数
- 6.2.6卷积函数
- 6.2.7转置卷积
- 6.3池化层
-
- 6.3.1 局部池化
- 6.3.2全局池化
6.1卷积神经网络简介
卷积神经网路(Convolutional Neural Network, CNN)是一种前馈神经网络,对于CNN最早可以追溯到1986年BP算法的提出。1989年LeCun将其用到多层神经网络中,直到1998年LeCun提出LeNet-5模型,神经网络的雏形基本形成。在接下来近十年的时间里,卷积神经网络的相关研究处于低谷,原因有两个:一是研究人员意识到多层神经网络在进行BP训练时的计算量极大,当时的硬件计算能力完全不可能实现;二是包括SVM在内的浅层机器学习算法也开始崭露头角。
2006年,Hinton一鸣惊人,在《科学》上发表文章,CNN再度觉醒,并取得长足发展。2012年,ImageNet大赛上CNN夺冠。2014年,谷歌研发出20层的VGG模型。同年,DeepFace、DeepID模型横空出世,直接将LFW数据库上的人脸识别、人脸认证的正确率刷到99.75%,已超越人类平均水平。
卷积神经网路由一个或多个卷积层和顶端的全连通层(对应经典的神经网路)组成,同时也包括关联权重和池化层(pooling layer)等。图6-1就是一个卷积神经网络架构。
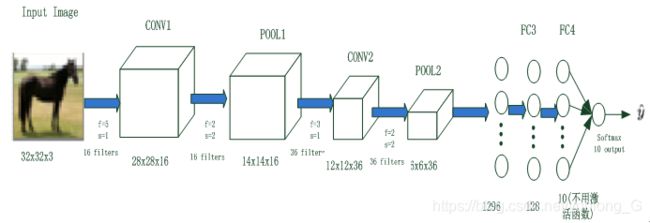
图6-1 卷积神经网络示意图
与其他深度学习结构相比,卷积神经网路在图像和语音识别方面能够给出更好的结果。这一模型也可以使用反向传播算法进行训练。相比其他深度、前馈神经网路,卷积神经网路用更少参数,却能获得更高性能。
图6-1为卷积神经网络的一般结构,其中包括卷积神经网络的常用层,如卷积层、池化层、全连接层和输出层;有些还包括其他层,如正则化层、高级层等。接下来我们就各层的结构、原理等进行详细说明。
图6-1是用一个比较简单的卷积神经网络对手写输入数据进行分类,由卷积层(Conv2d)、池化层(MaxPool2d)和全连接层(Linear)叠加而成。下面我们先用代码定义这个卷积神经网络,然后,介绍各部分的定义及原理
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets, transforms
class CNNNet01(nn.Module):
def __init__(self):
super(CNNNet,self).__init__()
self.conv1 = nn.Conv2d(in_channels=3,out_channels=16,kernel_size=5,stride=1)
self.pool1 = nn.MaxPool2d(kernel_size=2,stride=2)
self.conv2 = nn.Conv2d(in_channels=16,out_channels=36,kernel_size=5,stride=1)
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)
self.dense1 = nn.Linear(900,128)
self.dense2 = nn.Linear(128,10)
def forward(self,x):
x=self.pool1(F.relu(self.conv1(x)))
x=self.pool2(F.relu(self.conv2(x)))
x=x.view(-1,900)
x=F.relu(self.dense2(F.relu(self.dense1(x))))
return x
6.2卷积层
卷积层是卷积神经网络的核心层,而卷积(Convolution)又是卷积层的核心。卷积我们直观的理解,就是两个函数的一种运算,这种运算称为卷积运算。这样说或许比较抽象,我们还是先抛开复杂概念,先从具体实例开始吧。图6-2 就是一个简单的二维空间卷积运算示例,虽然简单,但却包含了卷积的核心内容。
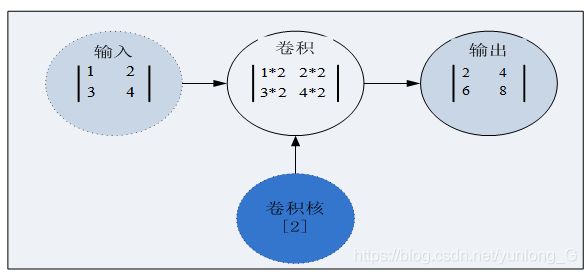
图6-2 在二维空间上的一个卷积运算
在图6-2中,输入和卷积核都是张量,卷积运算就是用卷积核分别乘以输入张量中的每个元素,然后输出一个代表每个输入信息的张量。其中卷积核(kernel)又称为权重过滤器或简称过滤器(filter)。接下来我们把输入、卷积核推广到更高维空间上,输入由2x2矩阵,拓展为5x5矩阵,卷积核由一个标量拓展为一个3x3矩阵,如图6-3。这时该如何进行卷积呢?
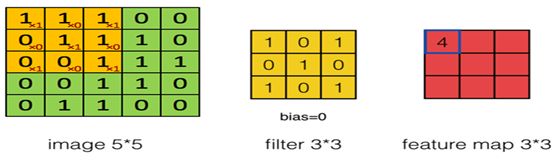
图6-3 卷积神经网络卷积运算
在图6-3中,生成右边矩阵中第1行第1列的数据
用卷积核中每个元素,乘以对应输入矩阵中的对应元素,这点还是一样,但输入张量为5x5矩阵,而卷积核为3x3矩阵,所以这里首先就要解决一个如何对应的问题,这个问题解决了,这个推广也就完成了。把卷积核作为在输入矩阵上一个移动窗口,对应关系就迎刃而解。
卷积核如何确定?卷积核如何在输入矩阵中移动?移动过程中出现超越边界如何处理?这种因移动可能带来的问题,接下来将进行说明。
6.2.1 卷积核
卷积核,从这个名字可以看出它的重要性,它是整个卷积过程的核心。比较简单的卷积核或过滤器有Horizontalfilter、Verticalfilter、Sobel filter等。这些过滤器能够检测图像的水平边缘、垂直边缘、增强图片中心区域权重等。过滤器的具体作用,我们通过以下一些图来说明。
(1)垂直边缘检测
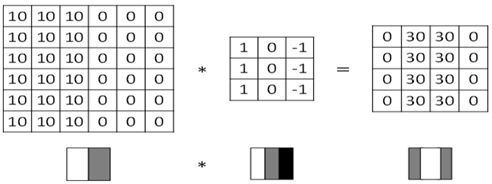
图6-4 过滤器对垂直边缘的检测
这个过滤器是3x3矩阵(注,过滤器一般是奇数阶矩阵),其特点是有值的是第1列和第3列,第2列为0。经过这个过滤器作用后,就把原数据垂直边缘检测出来了。
(2)水平边缘检测
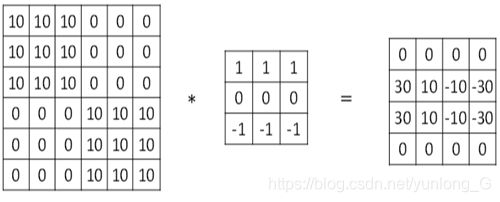
图6-5 水平过滤器检测水平边缘示意图
这个过滤器也是3x3矩阵,其特点是有值的是第1行和第3行,第2行为0。经过这个过滤器作用后,就把原数据水平边缘检测出来了。
(3)过滤器对图像水平边缘检测、垂直边缘检测的效果图
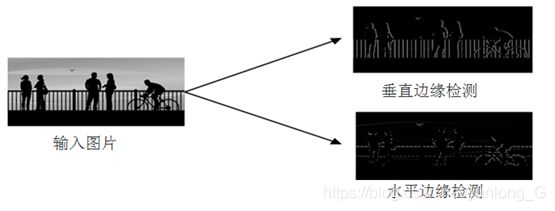
图6-6过滤器对图像水平边缘检测、垂直边缘检测后的效果图
以上这些过滤器是比较简单的,在深度学习中,过滤器的作用不仅在于检测垂直边缘、水平边缘等,还需要检测其他边缘特征。
过滤器如何确定呢?过滤器类似于标准神经网络中的权重矩阵W,W需要通过梯度下降算法反复迭代求得。同样,在深度学习学习中,过滤器也是需要通过模型训练来得到。卷积神经网络主要目的就是计算出这些filter的数值。确定得到了这些filter后,卷积神经网络的浅层网络也就实现了对图片所有边缘特征的检测。
这节简单说明了卷积核的生成方式及作用。假设卷积核已确定,卷积核如何对输入数据进行卷积运算呢?这将在下节进行介绍。
6.2.2步幅
如何实现对输入数据进行卷积运算?回答这个问题之前,我们先回顾一下图6-3。在图6-3的左边的窗口中,左上方有个小窗口,这个小窗口实际上就是卷积核,其中x后面的值就是卷积核的值。如第1行为:x1、x0、x1对应卷积核的第1行[1 0 1]。右边窗口中这个4是如何得到的呢?就是5x5矩阵中由前3行、前3列构成的矩阵各元素乘以卷积核中对应位置的值,然后累加得到的。即:1x1+1x0+1x1+0x0+1x1+1x0+0x1+0x0+1x1=4,右边矩阵中第1行第2列的值如何得到呢?我们只要把左图中小窗口往右移动一格,然后,进行卷积运算;第1行第3列,如此类推;第2行、第3行的值,只要把左边的小窗口往下移动一格,然后再往右即可。看到这里,如果还不很清楚,没关系,看图6-7就一目了然。
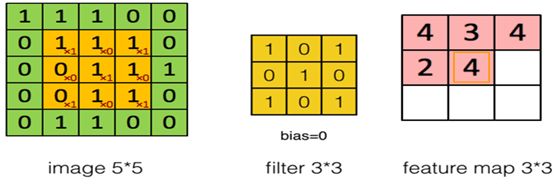
图6-7卷积神经网络卷积运算,生成右边矩阵中第2行第2列的数据
小窗口(实际上就是卷积核或过滤器)在左边窗口中每次移动的格数(无论是自左向右移动,或自上向下移动)称为步幅(strides),在图像中就是跳过的像素个数。上面小窗口每次只移动一格,故参数strides=1。这个参数也可以是2或3等数。如果是2,每次移动时就跳2格或2个像素,如下图6-8所示。
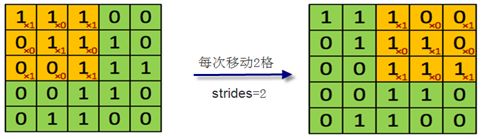
图6-8 strides=2 示意图
在小窗口移动过程中,其值始终是不变的,都是卷积核的值。换一句话来说,卷积核的值,在整个过程中都是共享的,所以又把卷积核的值称为共享变量。卷积神经网络采用参数共享的方法大大降低了参数的数量。
参数strides是卷积神经网络中的一个重要参数,在用PyTorch具体实现时,strides参数格式为单个整数或两个整数的元组(分别表示在height和width维度上的值)。
在图6-8中,小窗口如果继续往右移动2格,卷积核窗口部分在输入矩阵之外,如下图6-9。此时,该如何处理呢?具体处理方法就涉及到下节要讲的内容–填充(padding)。
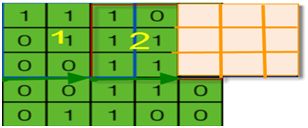
图6-9小窗口移动输入矩阵外
6.2.3 填充
当输入图片与卷积核不匹配时或卷积核超过图片边界时,可以采用边界填充(padding)的方法。即把图片尺寸进行扩展,扩展区域补零。如图6-10。当然也可不扩展。
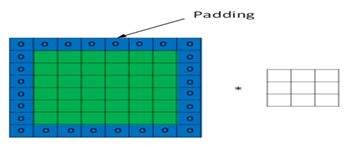
图6-10采用padding方法,对图片进行扩展,然后补零。
根据是否扩展padding又分为Same、Valid。采用Same方式时,对图片扩展并补0;采用Valid方式时,对图片不扩展。如何选择呢?在实际训练过程中,一般选择Same,使用Same不会丢失信息。设补0的圈数为p,输入数据大小为n,过滤器大小为f,步幅大小为s,则有:

6.2.4 多通道上的卷积
前面我们对卷积在输入数据、卷积核的维度上进行了扩展,但输入数据、卷积核都是单个,如果从图形的角度来说都是灰色的,没有考虑彩色图片情况。在实际应用中,输入数据往往是多通道的,如彩色图片就3通道,即R、G、B通道。对于3通道的情况如何卷积呢?3通道图片的卷积运算与单通道图片的卷积运算基本一致,对于3通道的RGB图片,其对应的滤波器算子同样也是3通道的。例如一个图片是6 x 6 x 3,分别表示图片的高度(height)、宽度(weight)和通道(channel)。过程是将每个单通道(R,G,B)与对应的filter进行卷积运算求和,然后再将3通道的和相加,得到输出图片的一个像素值。具体过程如图6-11所示。
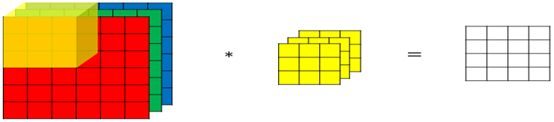
图6-11 3通道卷积示意图
为了实现更多边缘检测,可以增加更多的滤波器组。图6-12就是两组过滤器Filter W0和Filter W1。7*7*3输入,经过两个3*3*3的卷积(步幅为2),得到了3*3*2的输出。输出是利用两组卷积核分别对输入进行卷积,所以是两组输出,对应3*3*2
另外我们也会看到图6-10中的Zero padding是1,也就是在输入元素的周围补了一圈0。Zero padding对于图像边缘部分的特征提取是很有帮助的,可以防止信息丢失。最后,不同滤波器组卷积得到不同的输出,个数由滤波器组决定。
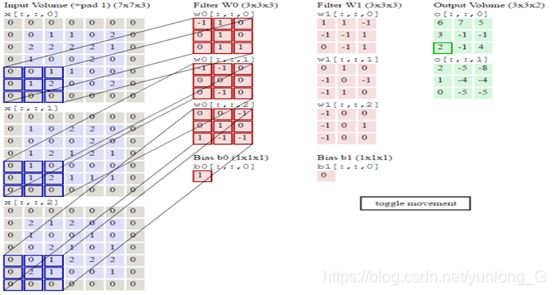
图6-12多组卷积核的卷积运算示意图
6.2.5激活函数
卷积神经网络与标准的神经网络类似,为保证其非线性,也需要使用激活函数,即在卷积运算后,把输出值另加偏移量,输入到激活函数,然后作为下一层的输入,如图6-13所示。
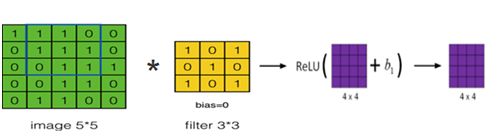
图6-13卷积运算后的结果+偏移量输入到激活函数ReLU
常用的激活函数有:tf.sigmoid、tf.nn.relu 、tf.tanh、 tf.nn.dropout等,这些激活函数的详细介绍可参考上一篇
6.2.6卷积函数
卷积函数是构建神经网络的重要支架,通常Pytorch的卷积运算是通过nn.Conv2d来完成。下面先介绍nn.Conv2d的参数,及如何计算输出的形状(shape)。
(1) nn.Conv2d函数
torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True, padding_mode=‘zeros’)
| 主要参数 | 说明: |
|---|---|
| in_channels(int) | 输入信号的通道 |
| out_channels(int) | 卷积产生的通道 |
| kerner_size(int or tuple) | 卷积核的尺寸 |
| stride(int or tuple, optional) | 卷积步长 |
| padding(int or tuple, optional) | 输入的每一条边补充0的层数 |
| dilation(int or tuple, optional) | 卷积核元素之间的间距 |
| groups(int, optional) | 控制输入和输出之间的连接: group=1,输出是所有的输入的卷积;group=2,此时相当于有并排的两个卷积层,每个卷积层计算输入通道的一半,并且产生的输出是输出通道的一半,随后将这两个输出连接起来。 |
| bias(bool, optional) | 如果bias=True,添加偏置。其中参数kernel_size,stride,padding,dilation也可以是一个int的数据,此时卷积height和width值相同;也可以是一个tuple数组,tuple的第一维度表示height的数值,tuple的第二维度表示width的数值 |
| - | - |
(2)输出形状
当groups=1时
conv = nn.Conv2d(in_channels=6, out_channels=12, kernel_size=1, groups=1)
conv.weight.data.size() # torch.Size([12, 6, 1, 1])
torch.Size([12, 6, 1, 1])
当groups=2时
conv = nn.Conv2d(in_channels=6, out_channels=12, kernel_size=1, groups=2)
conv.weight.data.size() #torch.Size([12, 3, 1, 1])
torch.Size([12, 3, 1, 1])
当groups=3时
conv = nn.Conv2d(in_channels=6, out_channels=12, kernel_size=1, groups=3)
conv.weight.data.size() #torch.Size([12, 2, 1, 1])
torch.Size([12, 2, 1, 1])
6.2.7转置卷积
转置卷积(Transposed Convolution)在一些文献中也称之为反卷积(Deconvolution)或部分跨越卷积(Fractionally-strided Convolution)。何为转置卷积,它与卷积又有哪些不同?
通过卷积的正向传播的图像一般越来越小,是下采样(downsampled)。卷积的方向传播实际上就是一种转置卷积,它是上采样(up-sampling)。
我们先简单回顾卷积的正向传播是如何运算的,假设卷积操作的相关参数为:输入大小为4,卷积核大小为3,步幅为2,填充为0,即 (n=4,f=3,s=1,p=0),根据公式(6.2)可知,输出 o=2。
整个卷积过程,可用图6-14 表示:
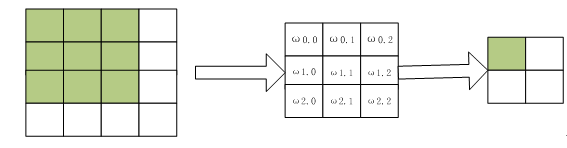
图6-14 卷积运算示意图
对于上述卷积运算,我们把图6-14所示的3×3卷积核展成一个如下所示的[4,16]的稀疏矩阵 C, 其中非0元素 ωi,j 表示卷积核的第 i 行和第 j 列 。

我们再把4×4的输入特征展成[16,1]的矩阵 X,那么 Y=CX 则是一个[4,1]的输出特征矩阵,把它重新排列2×2的输出特征就得到最终的结果,从上述分析可以看出,卷积层的计算其实是可以转化成矩阵相乘。
反向传播时又会如何呢?首先从卷积的反向传播算法开始。假设损失函数为L,则反向传播时,对L关系的求导,利用链式法则得到:

由此,可得X=C^T Y ,即反卷积的操作就是要对这个矩阵运算过程进行逆运算。
转置卷积在生成式对抗网络(GAN)中使用很普遍,后续我们将介绍,图6-15为使用转置卷积的一个示例,它一个上采样过程。
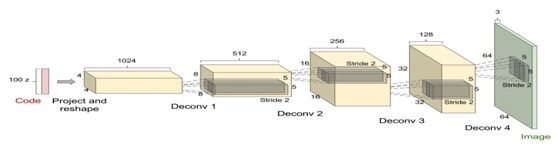
图6-15 转置卷积示例
Pytorch二维转置卷积的格式为
torch.nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_poutput_padding=0, groups=1, bias=True, dilation=1, padding_mode='zeros')
6.3池化层
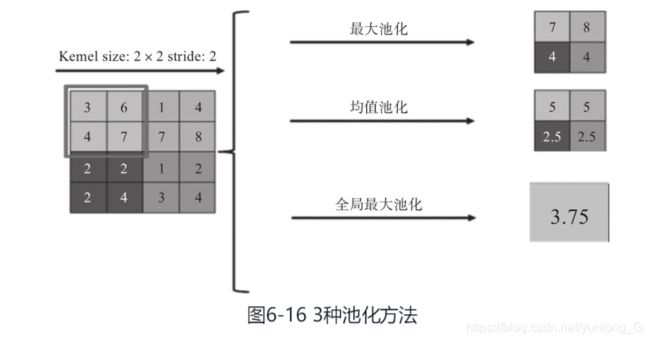
池化(Pooling)又称下采样,通过卷积层获得图像的特征后,理论上可以直接使用这些特征训练分类器(如Softmax)。但是,这样做将面临巨大的计算量挑战,而且容易产生过拟合的现象。为了进一步降低网络训练参数及模型的过拟合程度,就要对卷积层进行池化(Pooling)处理。常用的池化方式通常有3种。·最大池化(Max Pooling):选择Pooling窗口中的最大值作为采样值。·均值池化(Mean Pooling):将Pooling窗口中的所有值相加取平均,以平均值作为采样值。·全局最大(或均值)池化:与平常最大或最小池化相对而言,全局池化是对整个特征图的池化而不是在移动窗口范围内的池化。这3种池化方法,可用图6-16来描述
池化层在CNN中可用来减小尺寸,提高运算速度及减小噪声影响,让各特征更具有健壮性。池化层比卷积层更简单,它没有卷积运算,只是在滤波器算子滑动区域内取最大值或平均值。而池化的作用则体现在降采样:保留显著特征、降低特征维度,增大感受野。深度网络越往后面越能捕捉到物体的语义信息,这种语义信息是建立在较大的感受野基础上。
6.3.1 局部池化
我们通常使用的最大或平均池化,是在特征图(Feature Map)上以窗口的形式进行滑动(类似卷积的窗口滑动),操作为取窗口内的平均值作为结果,经过操作后,特征图降采样,减少了过拟合现象。其中在移动窗口内的池化被称为局部池化。在PyTorch中,最大池化常使用nn.MaxPool2d,平均池化使用nn.AvgPool2d。在实际应用中,最大池化比其他池化方法更常用。它们的具体格式如下:
torch.nn.MaxPool2d(kernel_size,stride=None,padding=0,diletion=1,return_indices=False,ceil_mode=False)
参数说明如下所示。
- kernel_size:池化窗口的大小,取一个4维向量,一般是[height,width],如果两者相等,可以是一个数字,如kernel_size=3。
- stride:窗口在每一个维度上滑动的步长,一般也是[stride_h,stride_w],如果两者相等,可以是一个数字,如stride=1。
- padding:和卷积类似。
- dilation:卷积对输入数据的空间间隔。
- return_indices:是否返回最大值对应的下标。
- ceil_mode:使用一些方块代替层结构。
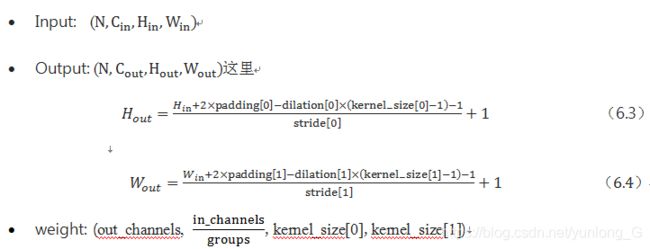
输入、输出的形状计算公式如下所示。假设输入input的形状为:(N,C,Hin,Win)。输出output的形状为:(N,C,Hout,Wout),则输出大小与输入大小的计算公式如下所示。
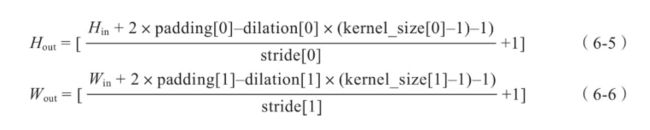
如果不能整除,则取整数。实例代码:
# 池化窗口为正方形 size=3, stride=2
m1 = nn.MaxPool2d(3, stride=2)
# 池化窗口为非正方形
m2 = nn.MaxPool2d((3, 2), stride=(2, 1))
input = torch.randn(20, 16, 50, 32)
output = m2(input)
print(output.shape)
torch.Size([20, 16, 24, 31])
6.3.2全局池化
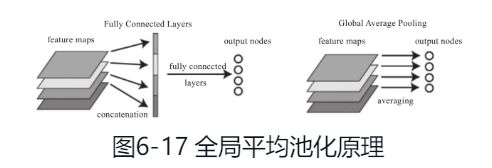
与局部池化相对的就是全局池化,全局池化也分最大或平均池化。所谓的全局就是针对常用的平均池化而言,平均池化会有它的filter size,比如2×2,而全局平均池化就没有size,它针对的是整张Feature Map。下面以全局平均池化为例。全局平均池化(Global Average Pooling,GAP),不以窗口的形式取均值,而是以特征图为单位进行均值化,即一个特征图输出一个值。那如何理解全局池化呢?可以通过图6-17来说明。图6-17左边把4个特征图,先用一个全连接层展平为一个向量,然后通过一个全连接层输出为4个分类节点。GAP可以把这两步合二为一。我们可以把GAP视为一个特殊的Average Pool层,只不过其Pool Size和整个特征图一样大,其实就是求每张特征图所有像素的均值,输出一个数据值,这样4个特征图就会输出4个数据点,这些数据点组成一个1*4的向量。
使用全局平均池化代替CNN中传统的全连接层。在使用卷积层的识别任务中,全局平均池化能够为每一个特定的类别生成一个特征图(Feature Map)。GAP的优势在于:各个类别与Feature Map之间的联系更加直观(相比与全连接层的黑箱来说),Feature Map被转化为分类概率也更加容易,因为在GAP中没有参数需要调,所以避免了过拟合问题。GAP汇总了空间信息,因此对输入的空间转换鲁棒性更强。所以目前卷积网络中最后几个全连接层,大都用GAP替换。全局池化层在Keras中有对应的层,如全局最大池化层(GlobalMaxPooling2D)。PyTorch虽然没有对应名称的池化层,但可以使用PyTorch中的自适应池化层(AdaptiveMaxPool2d(1)或nn.AdaptiveAvgPool2d(1))来实现,如何实现后续有实例介绍,这里先简单介绍自适应池化层,其一般格式为:
nn.AdaptiveMaxPool2d(output_size, return_indices=False)
# 输出大小为5x7
m = nn.AdaptiveMaxPool2d((5,7))
input = torch.randn(1, 64, 8, 9)
output = m(input)
print(output.shape)
torch.Size([1, 64, 5, 7])
# t输出大小为正方形 7x7
m = nn.AdaptiveMaxPool2d(7)
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(output.shape)
torch.Size([1, 64, 7, 7])
# 输出大小为 10x7
m = nn.AdaptiveMaxPool2d((None, 7))
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(output.shape)
torch.Size([1, 64, 10, 7])
# 输出大小为 1x1
m = nn.AdaptiveMaxPool2d((1))
input = torch.randn(1, 64, 10, 9)
output = m(input)
print(output.size())
torch.Size([1, 64, 1, 1])