Deformable-DETR(two-stage version)中Encoder Proposal
Deformable-DETR variants:Two-stage Deformable DETR

前言
- two stage Deformable DETR

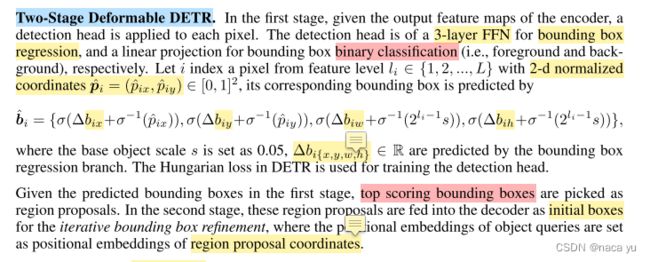
上图为论文中关于two-stage的部分,介绍较少,DETR及其变体分为:one-stage\two-stage,其中one-stage的decoder部分queries的初始化是由随机初始化的content queries(initially set zero and unlearnable) + position embeding(set randomly and learnable)。two-stage类似于RCNN,把encoder输出的memory作为shared feature map用于ROI Proposal,并将proposals用于后面decoder的queries初始化。这样可以加快decoder部分的收敛和稳定性。
- DINO中对于目前的初始化方法分为三类:
- 第一类以DETR为首的static anchors
- 第二类以deformable detr为首的dynamic anchors and contents
- 第三类作者提出的dynamic anchors and static contents

源码部分
- gen_encoder_output_proposals(mmdetection\mmdet\models\utils\transformer.py)
# get proposals
# get proposals
def gen_encoder_output_proposals(self, memory, memory_padding_mask,
spatial_shapes):
"""Generate proposals from encoded memory.
Args:
memory (Tensor) : The output of encoder,
has shape (bs, num_key, embed_dim). num_key is
equal the number of points on feature map from
all level.
memory_padding_mask (Tensor): Padding mask for memory.
has shape (bs, num_key).
spatial_shapes (Tensor): The shape of all feature maps.
has shape (num_level, 2).
Returns:
tuple: A tuple of feature map and bbox prediction.
- output_memory (Tensor): The input of decoder, \
has shape (bs, num_key, embed_dim). num_key is \
equal the number of points on feature map from \
all levels.
- output_proposals (Tensor): The normalized proposal \
after a inverse sigmoid, has shape \
(bs, num_keys, 4).
"""
N, S, C = memory.shape
proposals = []
_cur = 0
for lvl, (H, W) in enumerate(spatial_shapes):
mask_flatten_ = memory_padding_mask[:, _cur:(_cur + H * W)].view(
N, H, W, 1)
valid_H = torch.sum(~mask_flatten_[:, :, 0, 0], 1)
valid_W = torch.sum(~mask_flatten_[:, 0, :, 0], 1)
grid_y, grid_x = torch.meshgrid(
torch.linspace(
0, H - 1, H, dtype=torch.float32, device=memory.device),
torch.linspace(
0, W - 1, W, dtype=torch.float32, device=memory.device))
grid = torch.cat([grid_x.unsqueeze(-1), grid_y.unsqueeze(-1)], -1)
scale = torch.cat([valid_W.unsqueeze(-1),
valid_H.unsqueeze(-1)], 1).view(N, 1, 1, 2)
grid = (grid.unsqueeze(0).expand(N, -1, -1, -1) + 0.5) / scale
wh = torch.ones_like(grid) * 0.05 * (2.0**lvl)
proposal = torch.cat((grid, wh), -1).view(N, -1, 4)
proposals.append(proposal)
_cur += (H * W)
output_proposals = torch.cat(proposals, 1)
output_proposals_valid = ((output_proposals > 0.01) &
(output_proposals < 0.99)).all(
-1, keepdim=True)
output_proposals = torch.log(output_proposals / (1 - output_proposals))
output_proposals = output_proposals.masked_fill(
memory_padding_mask.unsqueeze(-1), float('inf'))
output_proposals = output_proposals.masked_fill(
~output_proposals_valid, float('inf'))
output_memory = memory
output_memory = output_memory.masked_fill(
memory_padding_mask.unsqueeze(-1), float(0))
output_memory = output_memory.masked_fill(~output_proposals_valid,
float(0))
output_memory = self.enc_output_norm(self.enc_output(output_memory))
return output_memory, output_proposals
- class DeformableDetrTransformer(Transformer):
def forward(self,
mlvl_feats,
mlvl_masks,
query_embed,
mlvl_pos_embeds,
reg_branches=None,
cls_branches=None,
**kwargs):
assert self.as_two_stage or query_embed is not None
feat_flatten = []
mask_flatten = []
lvl_pos_embed_flatten = []
spatial_shapes = []
for lvl, (feat, mask, pos_embed) in enumerate(
zip(mlvl_feats, mlvl_masks, mlvl_pos_embeds)):
bs, c, h, w = feat.shape
spatial_shape = (h, w)
spatial_shapes.append(spatial_shape)
feat = feat.flatten(2).transpose(1, 2)
mask = mask.flatten(1)
pos_embed = pos_embed.flatten(2).transpose(1, 2)
lvl_pos_embed = pos_embed + self.level_embeds[lvl].view(1, 1, -1)
lvl_pos_embed_flatten.append(lvl_pos_embed)
feat_flatten.append(feat)
mask_flatten.append(mask)
feat_flatten = torch.cat(feat_flatten, 1)
mask_flatten = torch.cat(mask_flatten, 1)
lvl_pos_embed_flatten = torch.cat(lvl_pos_embed_flatten, 1)
spatial_shapes = torch.as_tensor(
spatial_shapes, dtype=torch.long, device=feat_flatten.device)
level_start_index = torch.cat((spatial_shapes.new_zeros(
(1, )), spatial_shapes.prod(1).cumsum(0)[:-1]))
valid_ratios = torch.stack(
[self.get_valid_ratio(m) for m in mlvl_masks], 1)
reference_points = \
self.get_reference_points(spatial_shapes,
valid_ratios,
device=feat.device)
feat_flatten = feat_flatten.permute(1, 0, 2) # (H*W, bs, embed_dims)
lvl_pos_embed_flatten = lvl_pos_embed_flatten.permute(
1, 0, 2) # (H*W, bs, embed_dims)
memory = self.encoder(
query=feat_flatten,
key=None,
value=None,
query_pos=lvl_pos_embed_flatten,
query_key_padding_mask=mask_flatten,
spatial_shapes=spatial_shapes,
reference_points=reference_points,
level_start_index=level_start_index,
valid_ratios=valid_ratios,
**kwargs)
memory = memory.permute(1, 0, 2)
bs, _, c = memory.shape
if self.as_two_stage:
output_memory, output_proposals = \
self.gen_encoder_output_proposals(
memory, mask_flatten, spatial_shapes)
enc_outputs_class = cls_branches[self.decoder.num_layers](
output_memory)
enc_outputs_coord_unact = \
reg_branches[
self.decoder.num_layers](output_memory) + output_proposals
topk = self.two_stage_num_proposals
topk_proposals = torch.topk(
enc_outputs_class[..., 0], topk, dim=1)[1]
topk_coords_unact = torch.gather(
enc_outputs_coord_unact, 1,
topk_proposals.unsqueeze(-1).repeat(1, 1, 4))
topk_coords_unact = topk_coords_unact.detach()
reference_points = topk_coords_unact.sigmoid()
init_reference_out = reference_points
pos_trans_out = self.pos_trans_norm(
self.pos_trans(self.get_proposal_pos_embed(topk_coords_unact)))
query_pos, query = torch.split(pos_trans_out, c, dim=2)
else:
query_pos, query = torch.split(query_embed, c, dim=1)
query_pos = query_pos.unsqueeze(0).expand(bs, -1, -1)
query = query.unsqueeze(0).expand(bs, -1, -1)
reference_points = self.reference_points(query_pos).sigmoid()
init_reference_out = reference_points
# decoder
query = query.permute(1, 0, 2)
memory = memory.permute(1, 0, 2)
query_pos = query_pos.permute(1, 0, 2)
inter_states, inter_references = self.decoder(
query=query,
key=None,
value=memory,
query_pos=query_pos,
key_padding_mask=mask_flatten,
reference_points=reference_points,
spatial_shapes=spatial_shapes,
level_start_index=level_start_index,
valid_ratios=valid_ratios,
reg_branches=reg_branches,
**kwargs)
inter_references_out = inter_references
if self.as_two_stage:
return inter_states, init_reference_out,\
inter_references_out, enc_outputs_class,\
enc_outputs_coord_unact
return inter_states, init_reference_out, \
inter_references_out, None, None