ros tf坐标变换
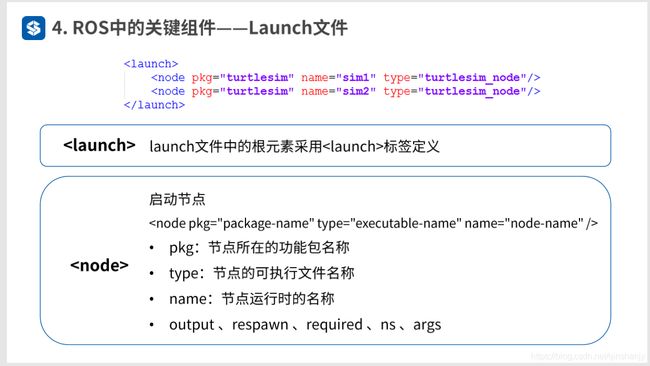
launch文件



启动aster
roscore
输入
roslaunch turtle_tf turtle_tf_demo.launch

可以看到两只海龟,其中一只海龟会追着另一只海龟跑。
用键盘控制移动
rosrun turtlesim turtle_teleop_key
输入以下命令,打印一张pdf可以清晰看到坐标
rosrun tf view_frames


监听查看两者的坐标变换
rosrun tf tf_echo turtle1 turtle2


通过上面的公式,通过世界坐标系,确定相应的向量的方向和长度,就可以实现坐标变换了。
在catkin_ws/src目录下创建一个新的功能包:
cd ~/catkin_ws/src
catkin_create_pkg learning std_msgs rospy roscpp
cd ~/catkin_ws
catkin_make

实现一个TF广播器,首先在learning_tf/src目录下创建一个turtle_tf_broadcaster.cpp代码文件,写入一下代码:
#include 
实现一个TF 监听器。首先在learning_tf/src目录下创建一个turtle_tf_listener.cpp代码文件,写入一下代码:
#include 
在CMakeLists.txt里面设置编译相关的规则,链接库
geometry_msgs
tf
turtlesim

add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})

还要在learning_tf文件下建一个launch文件夹,在launch文件夹下在创一个
start_demo_with_listener.launch文件

里面写入代码:
<launch>
<!-- 海龟仿真器 -->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<!-- 键盘控制 -->
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- 两只海龟的tf广播 -->
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<!-- 监听tf广播,并且控制turtle2移动 -->
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>
最后保存推出,开始编译
cd ~/catkin_ws
catkin_make
重新打开一个终端输入
roslaunch learning_tf start_demo_with_listener.launch

直接在这个终端就可以控制小海龟移动,因为我们的launch文件已经帮我们启动了键盘控制节点了。



