各种 NMS
文章目录
-
- 经典NMS
- Soft-NMS
- Softer-NMS(CVPR 2019)
- DIoU-NMS (AAAI 2020)
经典NMS
实现步骤如下:
- 选取这类output bbox中scores(置信度)最大的哪一个,记为bbox_best,并保留它
- 计算bbox_best与其余的bbox的IOU
- 如果其IOU>0.5了,那么就舍弃这个bbox(由于可能这两个box表示同一目标,所以保留分数高的哪一个)
- 从最后剩余的bboxes中,再找出最大scores的哪一个,如此循环往复
import numpy as np
def nms(dets,thresh):
#首先为x1,y1,x2,y2,score赋值
x1 = dets[:,0] #取所有行第一列的数据
y1 = dets[:,1]
x2 = dets[:,2]
y2 = dets[:,3]
scores = dets[:,4]
#按照score的置信度将其排序,argsort()函数是将x中的元素从小到大排列,提取其对应的index(索引)
order = scores.argsort()[::-1]
#计算面积
areas = (x2-x1+1)*(y2-y1+1)
#保留最后需要保留的边框的索引
keep = []
while order.size > 0:
#order[0]是目前置信度最大的,肯定保留
i = order[0]
keep.append(i)
#计算窗口i与其他窗口的交叠的面积,此处的maximum是np中的广播机制
xx1 = np.maximum(x1[i],x1[order[1:]])
yy1 = np.maximum(y1[i],y1[order[1:]])
xx2 = np.minimum(x2[i],x2[order[1:]])
yy2 = np.minimum(y2[i],y2[order[1:]])
#计算相交框的面积,左上右下,画图理解。注意矩形框不相交时w或h算出来会是负数,用0代替
w = np.maximum(0.0,xx2-xx1+1)
h = np.maximum(0.0,yy2-yy1+1)
inter = w*h
#计算IOU:相交的面积/相并的面积
ovr = inter/(areas[i]+areas[order[1:]]-inter)
#inds为所有与窗口i的iou值小于threshold值的窗口的index,其他窗口此次都被窗口i吸收
inds = np.where(ovr<thresh)[0] #np.where就可以得到索引值(3,0,8)之类的,再取第一个索引
#将order序列更新,由于前面得到的矩形框索引要比矩形框在原order序列中的索引小1(因为计算inter时是少了1的),所以要把这个1加回来
order = order[inds+1]
return keep
# test
if __name__ == "__main__":
dets = np.array([[30, 20, 230, 200, 1],
[50, 50, 260, 220, 0.9],
[210, 30, 420, 5, 0.8],
[430, 280, 460, 360, 0.7]])
thresh = 0.35
keep_dets = nms(dets, thresh)
print(keep_dets)
print(dets[keep_dets])
适应范围:
标准的NMS一般用于轴对齐的矩形框(即水平bbox)
缺点:
顺序处理的模式,计算IoU拖累了运算效率。剔除机制太严格,依据NMS阈值暴力剔除。阈值是经验选取的。评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
Soft-NMS
经典NMS算法存在着一些问题:1、对于重叠物体无法很好的检测。当图像中存在两个重叠度很高的物体时,经典NMS会过滤掉其中置信度较低的一个。2、不要粗鲁地删除所有IOU大于阈值的框,而是降低其置信度。
 其中红色框为经典NMS的步骤,而绿色框中的内容为Soft-NMS改进的步骤。Soft-NMS是使用一个基于Iou的衰减函数,降低Iou大于阈值Nt的Bounding box的置信度,IoU越大,置信度衰减程度越大。
其中红色框为经典NMS的步骤,而绿色框中的内容为Soft-NMS改进的步骤。Soft-NMS是使用一个基于Iou的衰减函数,降低Iou大于阈值Nt的Bounding box的置信度,IoU越大,置信度衰减程度越大。

import numpy as np
import copy
def soft_nms(bboxes, Nt=0.3, sigma2=0.5, score_thresh=0.3, method=2):
# 在 bboxes 之后添加对于的下标[0, 1, 2...], 最终 bboxes 的 shape 为 [n, 5], 前四个为坐标, 后一个为下标
res_bboxes = copy.deepcopy(bboxes)
N = bboxes.shape[0] # 总的 box 的数量
indexes = np.array([np.arange(N)]) # 下标: 0, 1, 2, ..., n-1
bboxes = np.concatenate((bboxes, indexes.T), axis=1) # concatenate 之后, bboxes 的操作不会对外部变量产生影响
# 计算每个 box 的面积
x1 = bboxes[:, 0]
y1 = bboxes[:, 1]
x2 = bboxes[:, 2]
y2 = bboxes[:, 3]
scores = bboxes[:, 4]
areas = (x2 - x1 + 1) * (y2 - y1 + 1)
for i in range(N):
# 找出 i 后面的最大 score 及其下标
pos = i + 1
if i != N - 1:
maxscore = np.max(scores[pos:], axis=0)
maxpos = np.argmax(scores[pos:], axis=0)
else:
maxscore = scores[-1]
maxpos = 0
# 如果当前 i 的得分小于后面的最大 score, 则与之交换, 确保 i 上的 score 最大
if scores[i] < maxscore:
bboxes[[i, maxpos + i + 1]] = bboxes[[maxpos + i + 1, i]]
scores[[i, maxpos + i + 1]] = scores[[maxpos + i + 1, i]]
areas[[i, maxpos + i + 1]] = areas[[maxpos + i + 1, i]]
# IoU calculate
xx1 = np.maximum(bboxes[i, 0], bboxes[pos:, 0])
yy1 = np.maximum(bboxes[i, 1], bboxes[pos:, 1])
xx2 = np.minimum(bboxes[i, 2], bboxes[pos:, 2])
yy2 = np.minimum(bboxes[i, 3], bboxes[pos:, 3])
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
intersection = w * h
iou = intersection / (areas[i] + areas[pos:] - intersection)
# Three methods: 1.linear 2.gaussian 3.original NMS
if method == 1: # linear 加权
weight = np.ones(iou.shape)
weight[iou > Nt] = weight[iou > Nt] - iou[iou > Nt]
elif method == 2: # gaussian 加权
weight = np.exp(-(iou * iou) / sigma2)
else: # original NMS
weight = np.ones(iou.shape)
weight[iou > Nt] = 0
scores[pos:] = weight * scores[pos:]
# select the boxes and keep the corresponding indexes
inds = bboxes[:, 5][scores > score_thresh]
keep = inds.astype(int)
return res_bboxes[keep]
if __name__ == "__main__":
dets = np.array([[665, 979, 1310, 2041, 0.94],
[741, 930, 1438, 1903, 0.6],
[582, 1065, 1417, 2079, 0.743],
[527, 1186, 1365, 1910, 0.643],
[703, 1092, 1241, 2092, 0.732],
[500, 1424, 1262, 2203, 0.475],
[645, 920, 1389, 1727, 0.375]])
print(soft_nms(bboxes=dets))
Softer-NMS(CVPR 2019)
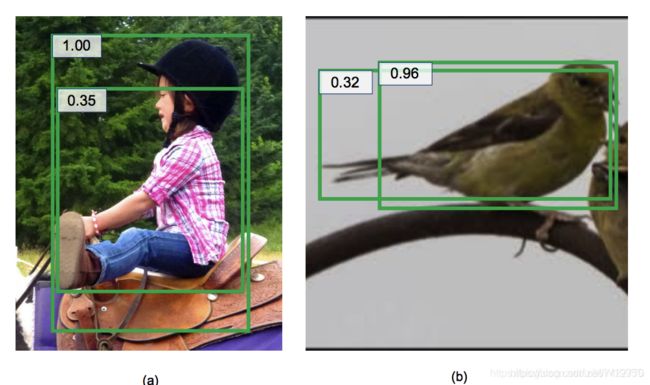
无论是经典NMS还是Soft-NMS算法,都是在一种假设前提下:置信度最高的Bounding box就是目标的候选位置最精确的物体位置。但是事实上,这个假设可能并不成立,或者说并不那么精确。NMS时用到的score仅仅是分类置信度得分,不能反映Bounding box的定位精准度,既分类置信度和定位置信非正相关的。NMS只能解决分类置信度和定位置信度都很高的,但是对其它三种类型:“分类置信度低-定位置信度低”,“分类置信度高-定位置信度低”,“分类置信度低-定位置信度高“都无法解决。
所有的候选Bounding box都够精确,无法确定该选择哪一个,见图7a
具有高置信度的Bounding box不够精确,见图7b
 代码:https://github.com/yihui-he/softer-NMS
代码:https://github.com/yihui-he/softer-NMS
DIoU-NMS (AAAI 2020)
DIoU-NMS出现于Distance-IoU一文,研究者认为若相邻框的中心点越靠近当前最大得分框 M 的中心点,则其更有可能是冗余框。也就是说,考虑IoU相同的情况,如下所示
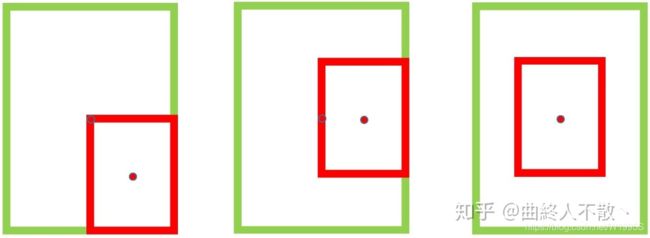 第一种相比于第三种越不太可能是冗余框。基于该观点,研究者使用所提出的DIoU替代IoU作为NMS的评判准则,公式如下:
第一种相比于第三种越不太可能是冗余框。基于该观点,研究者使用所提出的DIoU替代IoU作为NMS的评判准则,公式如下:
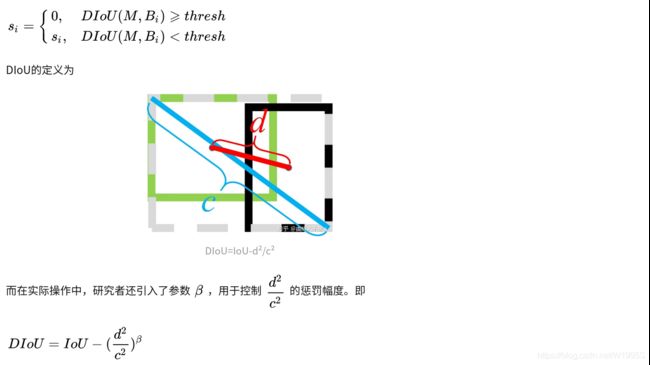 由公式可以看出,
由公式可以看出,

