cv中的注意力机制
cv中的注意力机制
- SENet
- Non-local Neural Networks
- CBAM
- DANet
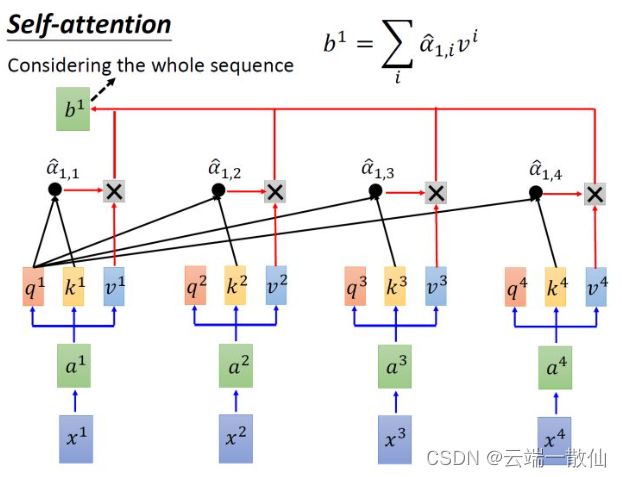
self-attention理解:

先从下面这个公式去看:
![]()
矩阵可以看作由一些向量组成,一个矩阵乘以它自己转置的运算,等同于向量分别与其他向量计算内积,(内积则表示为:两个向量的夹角,一个向量在另一个向量上的投影),投影的值大,说明两个向量相关度高;Softmax的意义为归一化,给矩阵中每个数一个权重值;最后再与X矩阵相乘,最后的结果就是加权求和之后的表示。
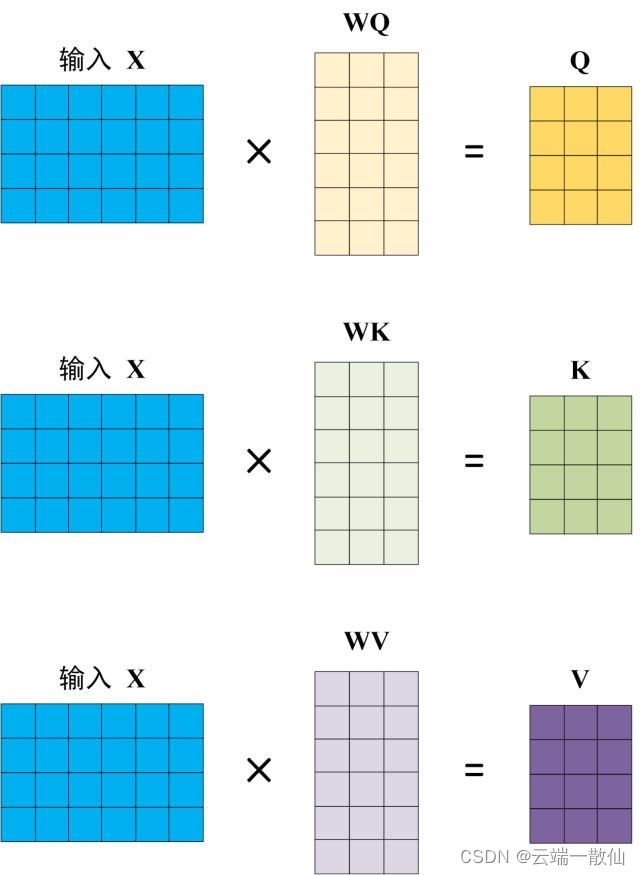
Q , K , V Q,K,V Q,K,V的计算都与输入X相关,为什么不直接使用而要对其进行线性变换?当然是为了提升模型的拟合能力,矩阵都是可以训练的,起到一个缓冲的效果。
假设 Q , K Q,K Q,K里的元素的均值为0,方差为1,那么 Q K T QK^T QKT中元素的均值为0,方差为d. 当d变得很大时, Q K T QK^T QKT中的元素的方差也会变得很大,如果 Q K T QK^T QKT中的元素方差很大,那么 s o f t m a x ( Q K T ) softmax(QK^T) softmax(QKT)的分布会趋于陡峭(分布的方差大,分布集中在绝对值大的区域)。总结一下就是 s o f t m a x ( Q K T ) softmax(QK^T) softmax(QKT)的分布会和d有关。因此 s o f t m a x ( Q K T ) softmax(QK^T) softmax(QKT)中每一个元素除以 d k 2 \sqrt[2]{d_k} 2dk后,方差又变为1。这使得 s o f t m a x ( Q K T ) softmax(QK^T) softmax(QKT)的分布“陡峭”程度与d解耦,从而使得训练过程中梯度值保持稳定。
注意力机制(attention)的基本思想就是想让系统学会注意力——能够忽略无关信息而关注重点信息,与机器翻译中的Attention应用思想类似,视觉中的Atttention其实也是学出一个权重分布,再拿这个权重分布施加在原来特征之上。不过施加权重的方式略有差别,视觉应用中一般有以下几种施加方式:
-
加权可以保留所有分量做加权(soft attention);
-
可以在分布中以某种采样策略选取部分分量做加权(hard attention)
-
加权可以作用在原图上
-
加权可以作用在空间尺度上,给不同空间区域加权
-
加权可以作用在Channel尺度上,给不同通道特征加权
-
加权可以作用在不同时刻历史特征上,结合循环结构添加权重
single-head self-attention
multi-head self-attention

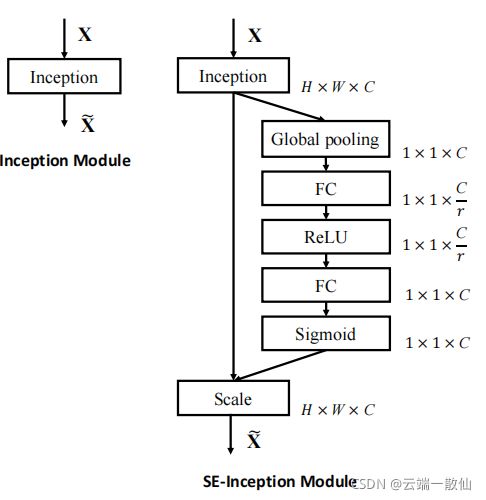
SENet
作用在Channel尺度上,给不同通道特征加权,学习了channel之间的相关性,筛选出了针对通道的注意力
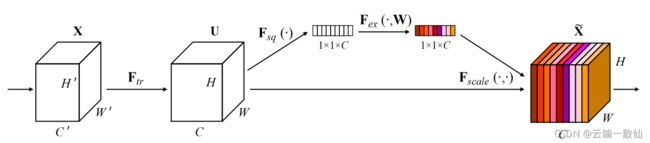
Squeeze操作(对应SE block结构图中的Fsq操作),就是一个global average pooling,使其具有全局的感受野,使得网络低层也能利用全局信息
Excitation操作全面捕获通道依赖性(相互之间的重要性),前面的squeeze都只是在某个channel的feature map里面操作,这两个全连接层的作用就是融合各通道的feature map信息

Fscale操作就是channel-wise multiplication,Uc表示U中第c个二维矩阵,下标c表示channel。Uc是一个二维矩阵,Sc是上一步的输出S(向量)中的一个数值,也就是权重,因此相当于把Uc矩阵中的每个值都乘以Sc
![]()
代码:
class SELayer(nn.Module):
def __init__(self, channel, reduction=16):
super(SELayer, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.fc = nn.Sequential(
nn.Linear(channel, channel // reduction, bias=False),
nn.ReLU(inplace=True),
nn.Linear(channel // reduction, channel, bias=False),
nn.Sigmoid()
)
def forward(self, x):
b, c, _, _ = x.size()
y = self.avg_pool(x).view(b, c)
y = self.fc(y).view(b, c, 1, 1)
return x * y.expand_as(x)
Non-local Neural Networks
Non-local属于self-attention的一种,只涉及到了位置注意力模块,而没有涉及常用的通道注意力机制
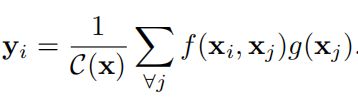
通用公式:
-
x是输入信号,cv中使用的一般是feature map
-
i 代表的是输出位置,如空间、时间或者时空的索引,响应应该对j进行枚举然后计算得到的
-
f 函数计算i和j的相似度
-
g 函数计算feature map在j位置的表示
-
最终的y是通过响应因子C(x) 进行标准化处理以后得到的
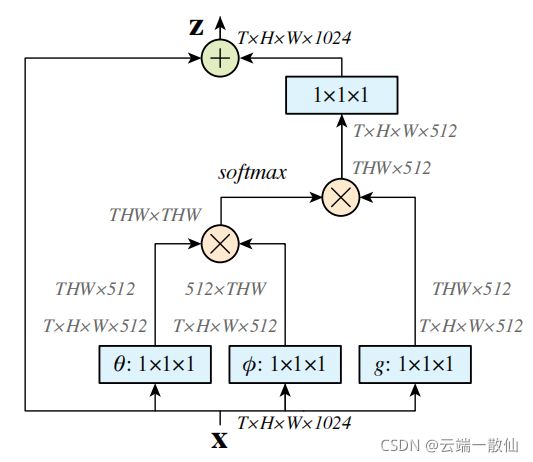
f函数:用于计算i和j相似度的函数,作者提出了四个具体的函数可以用作f函数 -
Gaussian
- Embedded Gaussian

-
Dot product

-
Concatenation

g函数:可以看做一个线性转化(Linear Embedding)
![]()
class _NonLocalBlockND(nn.Module):
def __init__(self,
in_channels,
inter_channels=None,
dimension=3,
sub_sample=True,
bn_layer=True):
super(_NonLocalBlockND, self).__init__()
assert dimension in [1, 2, 3]
self.dimension = dimension
self.sub_sample = sub_sample
self.in_channels = in_channels
self.inter_channels = inter_channels
if self.inter_channels is None:
self.inter_channels = in_channels // 2
# 进行压缩得到channel个数
if self.inter_channels == 0:
self.inter_channels = 1
if dimension == 3:
conv_nd = nn.Conv3d
max_pool_layer = nn.MaxPool3d(kernel_size=(1, 2, 2))
bn = nn.BatchNorm3d
elif dimension == 2:
conv_nd = nn.Conv2d
max_pool_layer = nn.MaxPool2d(kernel_size=(2, 2))
bn = nn.BatchNorm2d
else:
conv_nd = nn.Conv1d
max_pool_layer = nn.MaxPool1d(kernel_size=(2))
bn = nn.BatchNorm1d
self.g = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1,
stride=1,
padding=0)
if bn_layer:
self.W = nn.Sequential(
conv_nd(in_channels=self.inter_channels,
out_channels=self.in_channels,
kernel_size=1,
stride=1,
padding=0), bn(self.in_channels))
nn.init.constant_(self.W[1].weight, 0)
nn.init.constant_(self.W[1].bias, 0)
else:
self.W = conv_nd(in_channels=self.inter_channels,
out_channels=self.in_channels,
kernel_size=1,
stride=1,
padding=0)
nn.init.constant_(self.W.weight, 0)
nn.init.constant_(self.W.bias, 0)
self.theta = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1,
stride=1,
padding=0)
self.phi = conv_nd(in_channels=self.in_channels,
out_channels=self.inter_channels,
kernel_size=1,
stride=1,
padding=0)
if sub_sample:
self.g = nn.Sequential(self.g, max_pool_layer)
self.phi = nn.Sequential(self.phi, max_pool_layer)
def forward(self, x):
'''
:param x: (b, c, h, w)
:return:
'''
batch_size = x.size(0)
g_x = self.g(x).view(batch_size, self.inter_channels, -1)#[bs, c, w*h]
g_x = g_x.permute(0, 2, 1)
theta_x = self.theta(x).view(batch_size, self.inter_channels, -1)
theta_x = theta_x.permute(0, 2, 1)
phi_x = self.phi(x).view(batch_size, self.inter_channels, -1)
f = torch.matmul(theta_x, phi_x)
print(f.shape)
f_div_C = F.softmax(f, dim=-1)
y = torch.matmul(f_div_C, g_x)
y = y.permute(0, 2, 1).contiguous()
y = y.view(batch_size, self.inter_channels, *x.size()[2:])
W_y = self.W(y)
z = W_y + x
return z
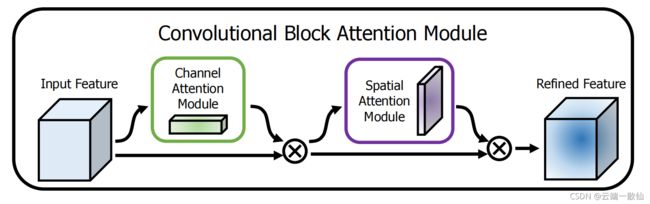
CBAM
CBAM在channel和spatial两个维度上引入了attention机制,总体结构:
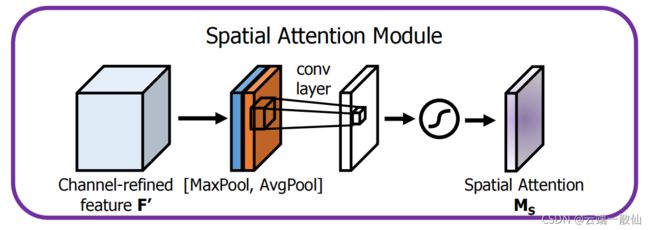
- 空间注意力模块
采用了全局平均池化和最大池化两种方式来分别利用不同的信息
![]()
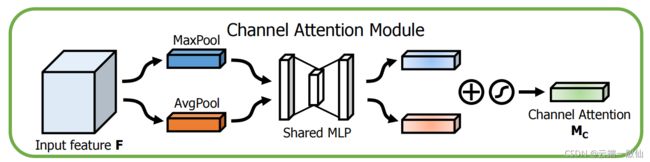
- 通道注意力模块
与通道注意力相似,给定一个 H×W×C 的特征 F,我们先分别进行一个通道维度的平均池化和最大池化得到两个 H×W×1 的通道描述,并将这两个描述按照通道拼接在一起。然后,经过一个 7×7 的卷积层,激活函数为 Sigmoid,得到权重系数 Ms。最后,拿权重系数和特征 F’相乘即可得到缩放后的新特征
![]()
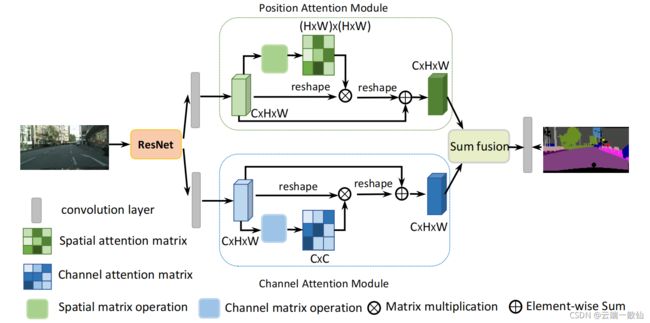
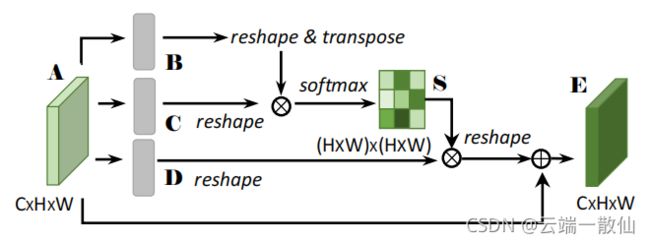
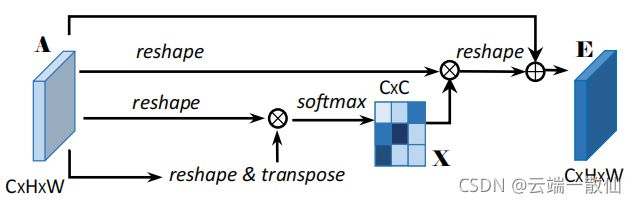
DANet
参考博客:
论文阅读笔记—senet
Non-local Neural Networks 原理详解及自注意力机制思考
视觉注意力机制 | Non-local 模块与 Self-attention 的之间的关系与区别?