十四.激光和惯导LIO-SLAM框架学习之惯导内参标定
专栏系列文章如下:
一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客
二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客
三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除主要源码部分)_goldqiu的博客-CSDN博客
四.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---2.scanRegistration.cpp--前端雷达处理和特征提取_goldqiu的博客-CSDN博客
五.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---3.laserOdometry.cpp--前端雷达里程计和位姿粗估计_goldqiu的博客-CSDN博客
六.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---4.laserMapping.cpp--后端建图和帧位姿精估计(优化)_goldqiu的博客-CSDN博客
七.激光SLAM框架学习之A-LOAM框架---速腾Robosense-16线雷达室内建图_goldqiu的博客-CSDN博客
八.激光SLAM框架学习之LeGO-LOAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
九.激光SLAM框架学习之LeGO-LOAM框架---速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据_goldqiu的博客-CSDN博客
十.激光SLAM框架学习之LeGO-LOAM框架---算法原理和改进、项目工程代码_goldqiu的博客-CSDN博客
十一.激光惯导LIO-SLAM框架学习之LIO-SAM框架---框架介绍和运行演示
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集_goldqiu的博客-CSDN博客_livox 数据集
十三.激光SLAM框架学习之livox-Mid-70雷达使用和实时室外跑框架_goldqiu的博客-CSDN博客
https://github.com/gaowenliang/imu_utilsgithub.com/gaowenliang/imu_utils
https://github.com/gaowenliang/code_utilsgithub.com/gaowenliang/code_utils
先github下载这两个包。
安装依赖:
sudo apt-get install libdw-dev
code_utils 依赖 ceres库, 需要先全局安装ceres库;
imu_utils 依赖 code_utils,故先catkin_make code_utils, 再将imu_utils放入编译。
编译报错解决:
编译code_utils 报错, fatal error: backward.hpp: No such file or directory
解决办法: 在code_utils文件夹下面找到sumpixel_test.cpp,修改#include “backward.hpp” 为 #include“code_utils/backward.hpp”即可编译成功。
然后将imu_utils放入再编译一次。
标定方式一:
直接运行sbg惯导,只需要改话题名称即可。
roslaunch imu_utils sbg.launch
增加imu标定包的launch文件如下:
然后运行这个launch文件进行标定。
标定方式二:
录制bag包
rosbag record -o 20211117.bag /imu_raw output
然后运行bag,运行标定程序进行标定。
注:标定时间根据自己设备运行时间来设定,如果设备一般是运行2个小时,那么就标定2个小时即可。
输出参数:

输出文件在data文件夹中,我们只需要加速度和角速度的平均噪音和偏置,不需要每个方向的。
如下:
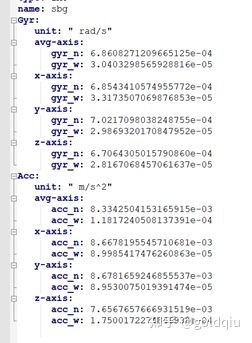
替换LIO-SAM中config文件夹的配置yaml文件中这四个参数,第五个参数需要连续采样Z轴重力加速度做均值。
