十八.多个SLAM框架(A-LOAM、Lego-loam、LIO-SAM、livox-loam)室外测试效果粗略对比分析
专栏系列文章如下:
一:Tixiao Shan最新力作LVI-SAM(Lio-SAM+Vins-Mono),基于视觉-激光-惯导里程计的SLAM框架,环境搭建和跑通过程_goldqiu的博客-CSDN博客
二.激光SLAM框架学习之A-LOAM框架---介绍及其演示_goldqiu的博客-CSDN博客
三.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---1.项目文件介绍(除主要源码部分)_goldqiu的博客-CSDN博客
四.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---2.scanRegistration.cpp--前端雷达处理和特征提取_goldqiu的博客-CSDN博客
五.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---3.laserOdometry.cpp--前端雷达里程计和位姿粗估计_goldqiu的博客-CSDN博客
六.激光SLAM框架学习之A-LOAM框架---项目工程代码介绍---4.laserMapping.cpp--后端建图和帧位姿精估计(优化)_goldqiu的博客-CSDN博客
七.激光SLAM框架学习之A-LOAM框架---速腾Robosense-16线雷达室内建图_goldqiu的博客-CSDN博客
八.激光SLAM框架学习之LeGO-LOAM框架---框架介绍和运行演示_goldqiu的博客-CSDN博客
九.激光SLAM框架学习之LeGO-LOAM框架---速腾Robosense-16线雷达室外建图和其他框架对比、录包和保存数据_goldqiu的博客-CSDN博客
十.激光SLAM框架学习之LeGO-LOAM框架---算法原理和改进、项目工程代码_goldqiu的博客-CSDN博客
十一.激光惯导LIO-SLAM框架学习之LIO-SAM框架---框架介绍和运行演示
十二.激光SLAM框架学习之livox-loam框架安装和跑数据集_goldqiu的博客-CSDN博客_livox 数据集
十三.激光SLAM框架学习之livox-Mid-70雷达使用和实时室外跑框架_goldqiu的博客-CSDN博客
十四.激光和惯导LIO-SLAM框架学习之惯导内参标定_goldqiu的博客-CSDN博客
十五.激光和惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)_goldqiu的博客-CSDN博客
十六.激光和惯导LIO-SLAM框架学习之配置自用传感器实时室外跑LIO-SAM框架_goldqiu的博客-CSDN博客
十七.激光和惯导LIO-SLAM框架学习之IMU和IMU预积分_goldqiu的博客-CSDN博客
固态雷达LIVOX-MID-70跑Livox-loam框架:


可以看见单固态雷达的效果还是很不错的。但是由于没有保存地图的功能,无法仔细看近处地面目标效果如何。
速腾机械式16线雷达跑A-LOAM框架

很明显的看到在大范围场景下A-LOAM框架的雷达里程计漂了,目前没有保存地图仔细分析的必要。
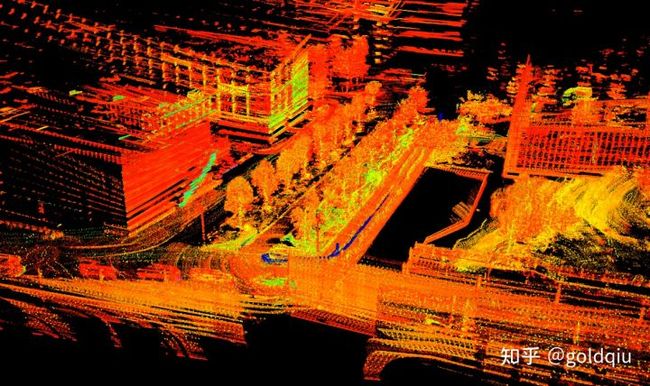
速腾机械式16线雷达跑LEGO-LOAM框架

效果比A-LOAM要好,同时代码更轻量化了,明显的表现是rviz查看全局点云图时不会卡了。同时lego-loam做了地面点的提取,可以将地图保存下来分析下。
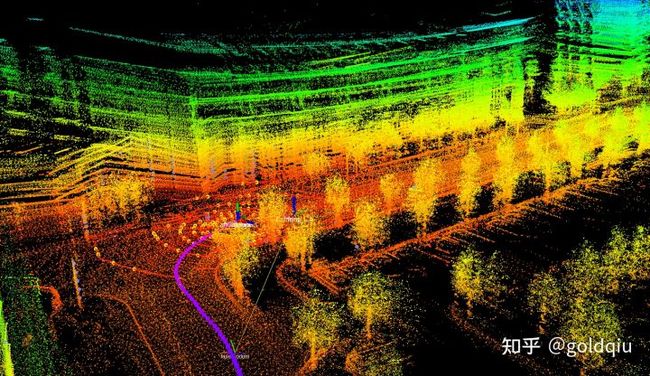
速腾机械式16线雷达和SBG惯导跑lio-sam框架


可以看到LIO-SAM作为lego-loam的升级框架,增加了IMU的约束,地图整体和细节看都会比较好,具体还得保存地图查看精度,或者用SLAM轨迹精度评估工具evo等进行建图和定位精度的评估。
两次测试数据对比
12月3日地图在CC打开效果:
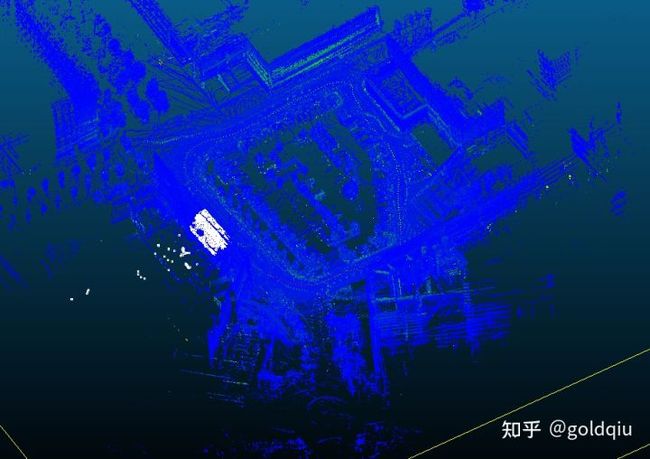
白色点为截取的无人车运动轨迹路边最近教学楼的墙。

可以看到厚度是3M,特别厚。
而11月8日测的数据如下:
地图在CC打开效果:

白色点为截取的无人车运动轨迹路边最近教学楼的墙。
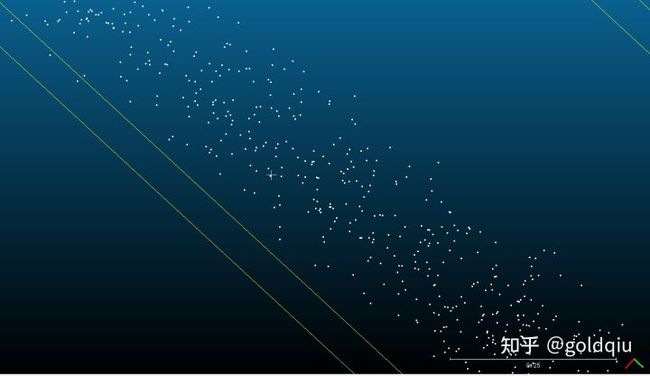
可以看到厚度是25cm,厚度可以接受(在粗略标定过的情况下)。
两次数据对比说明:
12月3日数据没有进行标定,11月18日的进行了实验室场景的粗略外参标定,效果明显好了很多。
测试结论:
1.固态雷达由于它的特性,建图效果比较好,但需要写保存点云地图的程序,或者用EVO精度评估。
2.lego-loam的高效运行框架和地面点的提取可以参考,但需要写保存点云地图的程序,或者用EVO精度评估。
3.lio-sam需要进行外参标定,比较必要。