BEV视觉3D感知算法梳理
1. 基于BEV空间的自动驾驶感知任务
最近,基于BEV空间下的感知任务已经涌现出了众多优秀算法,并在多个自动驾驶公开数据集(KITTI,Waymo,nuScenes)上取得了非常不错的成绩。根据自动驾驶汽车上安装的传感器类型(视觉传感器:针孔/鱼眼相机传感器、激光雷达传感器、毫米波雷达传感器)对感知算法进行分类的话,可以大致分为以下三个类别:
- 基于纯视觉/图像信息构建BEV空间特征实现自动驾驶感知任务
- 基于纯激光雷达信息构建BEV空间特征实现自动驾驶感知任务
- 基于多种传感器信息融合构建BEV空间特征实现自动驾驶感知任务
在这里,简单总结下不同传感器的优缺点,正是由于各个传感器之间可以取长补短,所以目前的自动驾驶汽车上通常都会配备不同类型的传感器。
激光雷达传感器(Lidar)
激光雷达传感器可以提供物体准确的深度信息以及结构信息;但激光雷达传感器提供物体信息的距离比较有限,同时其获得的点云数据与相机传感器采集到的图像信息相比更加稀疏;
相机传感器(Camera)
相机传感器可以很好的捕捉图像中物体包含的丰富的色彩和纹理信息;但由于图像成像过程中的限制,得到的2D图像无法保留物体在深度方向的信息;
毫米波雷达传感器(Radar)
毫米波雷达传感器采集到的数据相比于激光雷达传感器获取的数据更加稀疏;但其获取的物体信息范围相较于激光雷达传感器更远,同时可以更好的采集运动物体的信息;
虽然激光雷达传感器可以提供自动驾驶感知任务中不可或缺的深度信息,但是给汽车配备一套激光雷达设备的价格远高于给汽车配备一套相机设备的价格。所以,近年来涌现出诸多基于纯视觉的自动驾驶感知算法。而本文也主要是对基于纯视觉的感知算法模型进行梳理。
在完成后续算法模型梳理之前,先简单概括下基于BEV空间实现感知任务所具有的一些优势。
2. 基于BEV空间实现感知任务的优势
- 在各类算法模型得到BEV空间特征后,可以基于获得的BEV特征实现3D目标检测、车道线检测、地图语义分割等不同的感知任务,而且不同任务的感知结果可以很自然的应用到自动驾驶的后续模块(如:规划和控制);
- 在BEV空间下,可以非常方便的
将不同视角、不同时间序列(帧)、不同模态(传感器)的特征信息进行融合,输出更加准确的BEV空间特征,从而更好地实现自动驾驶感知任务; - 相较于基于Perpective View的纯视觉感知方法,基于BEV空间的感知算法以俯视的角度去实现感知任务,可以比较好的
缓解不同物体间的遮挡问题;
既然基于BEV空间实现感知任务具有诸多优势,同时纯视觉的方法造价又相对低廉,所以基于BEV空间下的纯视觉感知算法应运而生。但正如前文所提到的,激光雷达设备虽然造价高昂,但是却可以为自动驾驶感知任务提供物体在深度方向上的准确的信息。而纯视觉的自动驾驶感知算法由于只利用了2D图像的特征,没有深度方向的信息可以利用,所以如何基于2D的图像特征去实现BEV空间特征的构建成为了这类方法的核心问题。这里根据当下比较主流的构建方式划分为两大类:
第一大类:自下而上的BEV空间特征构建方法(也被称为基于深度的方法)
这类方法大体的思路是利用人工设计的深度预测网络对图像像素的深度信息进行预测,进而实现将网络提取到的2D图像特征转换为3D的相机视锥特征,实现2D空间特征到3D空间特征的转换,然后,再利用后续的Voxel Pooling等操作实现BEV空间特征的构建。
第二大类:自上而下的BEV空间特征构建方法
这类方法大体的思路是先在BEV空间下,根据点云的感知范围以及体素大小预先构建一组3D空间网格,然后利用相机内外参变换矩阵将3D空间网格点投影到图像坐标系下,接着对相应位置处的二维图像特征(通常为环视图像特征)进行采样,最终实现BEV空间特征的构建。或者利用最近比较火的Transformer中的的Query思想,在3D空间下初始一组Object Query,通过Cross-Attention的思想将Object Query与图像特征进行交互,得到BEV特征从而预测感知结果。
3. 自下而上的BEV空间特征构建方法
自下而上的感知算法如前文所说,主要利用深度预测网络预测出图像像素的离散深度信息,实现2D图像特征向3D空间特征的转换,下面主要梳理下比较经典的LSS和BEVDet算法模型。
3.1 LSS:Lift, Splat, Shoot: Encoding Images From Arbitrary Camera Rigs by Implicitly Unprojecting to 3D
论文链接:https://arxiv.org/pdf/2008.05711.pdf;
Github仓库源码:https://github.com/nv-tlabs/lift-splat-shoot;
LSS是发表在ECCV 2020上的一篇论文,其主要是解决感知中的地图分割任务的,但其利用深度估计网络预测像素的离散深度,从而利用2D图像特征构建3D特征的思想被大多数感知算法借鉴。LSS算法模型的整体流程图如下
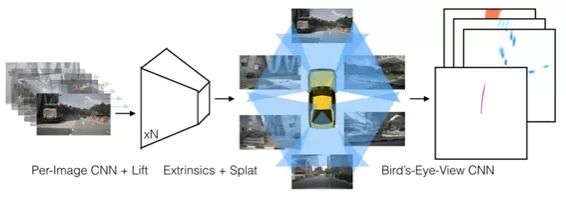
LSS算法模型的前向过程主要包括以下五个部分:
- 构建相机视锥坐标下的3D空间网格,并利用相机的内外参变换矩阵将3D空间网格点投影到到BEV空间下;
- 利用主干网络和特征融合网络提取输入环视图片的2D图像特征;
- 利用深度估计网络预测特征图中每个单元格的语义信息和深度概率分布,通过外积运算构建相机视锥特征;
- 对投影到BEV空间下的坐标点以及相机视锥特征,利用体素池化(Voxel Pooling)构建BEV空间特征;
- 对输出的BEV特征利用BEV Encoder模块完成多尺度特征的提取和融合,将融合后的特征用于完成地图分割任务;
构建相机视锥下的3D网格 + 空间点投影到BEV空间
- 构建相机视锥下的3D网格(源码中的creat_frustum()函数)
def create_frustum():
ogfH, ogfW = self.data_aug_conf['final_dim'] # 原始图片大小 ogfH:128 ogfW:352
fH, fW = ogfH // self.downsample, ogfW // self.downsample # 下采样16倍后图像大小 fH: 8 fW: 22
# self.grid_conf['dbound'] = [4, 45, 1] # 在深度方向上划分网格 ds: DxfHxfW (41x8x22)
ds = torch.arange(*self.grid_conf['dbound'], dtype=torch.float).view(-1, 1, 1).expand(-1, fH, fW)
D, _, _ = ds.shape # D: 41 表示深度方向上网格的数量
# 在0到351上划分22个格子 xs: DxfHxfW(41x8x22)
xs = torch.linspace(0, ogfW - 1, fW, dtype=torch.float).view(1, 1, fW).expand(D, fH, fW)
# 在0到127上划分8个格子 ys: DxfHxfW(41x8x22)
ys = torch.linspace(0, ogfH - 1, fH, dtype=torch.float).view(1, fH, 1).expand(D, fH, fW)
# D x H x W x 3
# 堆积起来形成网格坐标, frustum[i,j,k,0]就是(i,j)位置,深度为k的像素的宽度方向上的栅格坐标 frustum: DxfHxfWx3
frustum = torch.stack((xs, ys, ds), -1)
return nn.Parameter(frustum, requires_grad=False)
- 利用相机内外参将相机视锥下的3D网格投影到BEV空间(源码中的
get_geometry()函数)
def get_geometry(self, rots, trans, intrins, post_rots, post_trans):
B, N, _ = trans.shape # B: batch size N:环视相机个数
# undo post-transformation
# B x N x D x H x W x 3
points = self.frustum - post_trans.view(B, N, 1, 1, 1, 3)
points = torch.inverse(post_rots).view(B, N, 1, 1, 1, 3, 3).matmul(points.unsqueeze(-1)
points = torch.cat((points[:, :, :, :, :, :2] * points[:, :, :, :, :, 2:3],
points[:, :, :, :, :, 2:3]
), 5)
combine = rots.matmul(torch.inverse(intrins))
points = combine.view(B, N, 1, 1, 1, 3, 3).matmul(points).squeeze(-1)
points += trans.view(B, N, 1, 1, 1, 3)
# (bs, N, depth, H, W, 3)
return points
利用主干网络和特征融合网络提取环视图像的2D图像特征
- 其中LSS原论文中采用的主干网络是EfficientNet-B0,其输出的多尺度特征如下:
level0 = Tensor([bs * N, 16, H / 2, W / 2])
level1 = Tensor([bs * N, 24, H / 4, W / 4])
level2 = Tensor([bs * N, 40, H / 8, W / 8])
level3 = Tensor([bs * N, 112, H / 16, W / 16])
level4 = Tensor([bs * N, 320, H / 32, W / 32])
- 对提取后的多尺度特征利用特征融合网络实现不同尺度特征的融合
Step1: 对最后一层特征升采样到倒数第二层大小
level4 -> Up -> level4' = (bs * N, 320, H / 16, W / 16)
Step2:对主干网络输出的后两层特征进行concat
cat(level4', level3) -> output = (bs * N, 432, H / 16, W / 16)
Step3:对concat后的特征,利用卷积层进一步拟合
ConvLayer(output) -> output' = (bs * N, 512, H / 16, W / 16)
其中ConvLayer =
"""Sequential(
(0): Conv2d(432, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU(inplace=True)
)"""
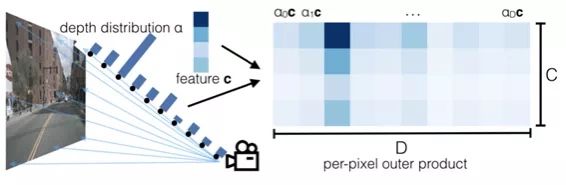
- 利用深度估计网络预测特征图中每个单元格的语义信息和深度概率分布,通过外积运算构建相机视锥特征
这一部分是LSS算法的核心:其主要思想是设计了一个深度估计网络对特征图每个单元格的语义信息(通道维度)和深度信息(深度方向的概率分布)进行预测,通过外积运算的方式,将2D的图像特征投影到3D的视锥特征,从而完成2D特征到3D特征的视角转换。
2D到3D部分的转换实现逻辑如下图所示(其中α ,c分别代表深度估计网络预测出来的深度概率密度以及语义特征信息);
利用体素池化根据BEV空间下的坐标点以及视锥特征构建BEV空间特征
这里在原始论文中主要采用了quick sum的方式计算BEV特征,其实现逻辑的图例如下(图例来自https://zhuanlan.zhihu.com/p/567880155)

对输出的BEV特征利用BEV Encoder模块完成多尺度特征的提取和融合,融合后的特征用于完成地图分割任务;
BEV Encoder提取BEV特征后输出的多尺度特征如下:
evel0:Tensor([bs, 64, 100, 100])
level1: Tensor([bs, 128, 50, 50])
level2: Tensor([bs, 256, 25, 25])
- 对输出的多尺度特征进行融合,得到最终的BEV特征,完成最后的地图分割任务
Step1: level2 -> Up (4x) -> level2' = (bs, 256, 100, 100)
Step2: concat(level2', level0) -> output = (bs, 320, 100, 100)
Step3: Conv1(output) -> output' = (bs, 256, 100, 100)
''' Conv1
Sequential(
(0): Conv2d(320, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(4): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(5): ReLU(inplace=True)
)'''
Step4: Up2(output') -> final = (bs, 1, 200, 200)
'''Sequential(
(0): Upsample(scale_factor=2.0, mode=bilinear)
(1): Conv2d(256, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(3): ReLU(inplace=True)
(4): Conv2d(128, 1, kernel_size=(1, 1), stride=(1, 1))
)'''
3.2. BEVDet: High-Performance Multi-Camera 3D Object Detection in Bird-Eye-View
论文链接:https://arxiv.org/pdf/2112.11790.pdf;
Github仓库源码:https://github.com/HuangJunJie2017/BEVDet;
BEVDet这篇论文主要是提出了一种基于BEV空间下的3D目标检测范式,BEVDet算法模型的整体流程图如下:

BEVDet算法模型的前向过程主要包括以下五个部分:
- 利用主干网络和特征融合网络提取输入环视图片的图像特征(对应上图中的Image-View Encoder模块);
- 借鉴LSS算法的思想将提取到的2D图像特征变换为3D相机视锥空间特征(对应上图中的View Transformer模块);
- 利用体素池化根据相机视锥特征和映射后的3D相机视锥空间构建BEV空间特征(对应上图中的View Transformer模块);
- 利用BEV Encoder模块对输出的BEV空间特征实现多尺度特征的提取和融合,得到增强的BEV特征(对应上图中的BEV Encoder模块);
- 对增强的BEV特征接3D检测头实现3D检测任务(对应上图中的3D Object Detection Head模块);
Image-View Encoder模块:利用主干网络和特征融合网络对环视图像进行提取
论文中利用ResNet-50主干网络提取输入环视图片的多尺度特征,输出多尺度特征如下:
l0 = Tensor([bs * N, 1024, H / 16, W / 16])
l1 = Tensor([bs * N, 2048, H / 32, W / 32])
- 利用特征融合网络对提取出来的多尺度特征进行融合
l0 = Tensor([bs * N, 1024, H / 16, W / 16])
l1 = Tensor([bs * N, 2048, H / 32, W / 32])
利用特征融合网络对提取出来的多尺度特征进行融合
Python
Step1:分别对输出的两个尺度的特征利用Conv1x1卷积降通道
l0 -> Conv1x1 -> l0_ = Tensor([bs * N, 512, H / 16, W / 16]);
l1 -> Conv1x1_ -> l1_ = Tensor([bs * N, 512, H / 32, W / 32]);
Step2: 将降采样后的特征图进行element-wise融合
Up(l1_) + l0_ = Tensor([bs * N, 512, H / 16, W / 16]);
Step3:融合后的特征利用Conv3x3完成进一步拟合,最后输出特征为Tensor([bs * N, 512, H / 16, W / 16])
View Transformer模块:根据得到的相机视锥特征及映射后的3D坐标点利用体素池化构建BEV空间特征
View Transformer模块的逻辑与LSS论文中构建相机视锥特征、3D坐标点的投影转换以及体素池化的逻辑基本一致,用于获得BEV空间特征。这里就不再展开介绍啦。
**BEV Encoder模块:**对View Transformer模块输出的BEV空间特征实现多尺度特征的提取和融合,增强BEV特征表达
- BEV主干网络用于实现BEV空间特征的多尺度特征提取,输出多尺度特征如下:
la = Tensor([bs, 160, 64, 64]);
lb = Tensor([bs, 320, 32, 32]);
lc = Tensor([bs, 640, 16, 16]);
BEV特征融合网络用于对多尺度BEV特征进行融合,实现逻辑如下:
Python
Step1. 对lc特征进行上采样到la大小
Tensor([bs, 640, 16, 16]) -- Up --> Tensor([bs, 640, 64, 64]);
Step2. 将la特征与lc特征进行concat,并利用Conv1x1卷积降维
Tensor([bs, 800, 64, 64]) -- Conv1x1 --> Tensor([bs, 512, 64, 64]);
Step3. 降维后的特征利用Up进行升采样,最后输出的BEV特征为Tensor([bs, 512, 128, 128])
对增强的BEV特征接3D检测头实现3D检测任务
需要注意的是,BEVDet对不同的检测类别会设置有独立的检测头,每组独立的检测头都会有六个分支来预测物体的不同属性,具体信息如下
- reg分支:用于预测BEV下物体相对于每个单元格左上角的xy偏移量;
- height分支:用于预测物体的高度信息;
- dim分支:用于预测物体的尺寸大小信息;
- rot分支:用于预测物体偏航角的正、余弦值;
- vel分支:用于预测物体沿xy方向的速度;
- heatmap分支:用于预测不同物体的类别概率;
4、自上而下的BEV空间特征构建方法
自上而下的这类算法通常是利用点云的感知范围以及体素大小预先构建一组BEV空间下的3D网格坐标,然后利用相机的内外参变换矩阵将3D空间坐标投影到图像坐标系下,并对相应位置的图像特征进行采样,或者借鉴Transformer中的Query思想,利用在3D空间下构建的Object Query与图像特征进行交互,最终实现BEV特征的构建。下面主要梳理下CaDDN、BEVFormer以及PETR算法模型;
4.1. CaDNN:Categorical Depth Distribution Network for Monocular 3D Object Detection
论文链接:https://arxiv.org/pdf/2103.01100.pdf;
Github仓库源码:https://github.com/TRAILab/CaDDN;
CaDDN是发表在CVPR 2021上的一篇论文,该论文主要是基于单目相机实现3D目标检测任务。CaDDN算法模型的整体流程图如下:
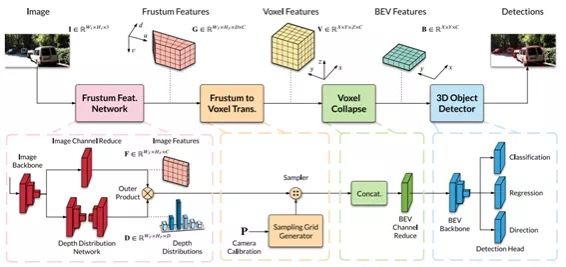
CaDDN算法模型的前向过程主要包括以下四个部分:
- 利用主干网络提取输入单目图像的多尺度特征(对应上图的Image Backbone);
- 利用提取到的多尺度特征预测特征图每个单元格上的语义表达和深度方向的概率估计,从而构建相机视锥特征(对应上图的Frustum Features);
- 将BEV空间下构造的3D网格点根据相机的内外参变换矩阵投影到相机视锥坐标系,进行特征采样(对应上图的Voxel Features),并利用Voxel Collapse形成最终的BEV空间特征;
- 对得到的BEV特征先经过BEV Backbone实现多尺度特征的提取,然后接Detection Head实现3D目标检测;
利用主干网络提取输入单目图像的多尺度特征
论文中采用的是ResNet-101主干网络提取图像的多尺度特征,多尺度特征如下:
Tensor([bs, 2048, H / 8, W / 8]); # 降采样8倍的特征图用于后续预测深度方向的离散信息;
Tensor([bs, 256, H / 4, W / 4]); # 降采样4倍的特征图用于后续预测语义特征;
利用提取到的多尺度特征预测特征图单元格的语义特征和深度方向的离散概率估计,从而构建相机视锥特征
CaDDN构建视锥特征的方式整体与LSS算法相近,二者算法主要的区别是CaDDN中深度预测网络是靠显式监督,而LSS算法中的深度预测网络是隐式监督的。
- 对降采样4倍的特征图,论文中采用ASPP模块,通过不同大小的卷积来扩大感受野,用于预测特征图上每个单元格的语义特征;
- 对降采样8倍的特征图,论文中利用深度预测网络预测深度方向的离散概率分布;
- 最后根据预测的语义特征以及深度方向的离散概率分布利用外积运算得到相机视锥特征;
将BEV空间下构造的3D网格点根据相机内外参投影到相机视锥坐标系,并进行采样,利用Voxel Collapse构建最终BEV特征
- 根据点云感知范围以及体素大小构建BEV空间下的3D网格点(源码中的create_meshgrid3d()函数)
def create_meshgrid3d(width, height, depth):
xs: Tensor = torch.linspace(0, width - 1, width, device=device, dtype=dtype)
ys: Tensor = torch.linspace(0, height - 1, height, device=device, dtype=dtype)
zs: Tensor = torch.linspace(0, depth - 1, depth, device=device, dtype=dtype)
# generate grid by stacking coordinates
base_grid = stack(torch_meshgrid([zs, xs, ys], indexing="ij"), dim=-1) # DxWxHx3
return base_grid.permute(0, 2, 1, 3).unsqueeze(0) # 1xDxHxWx3
- 根据得到的3D网格点,利用相机内外参投影回相机的视锥空间得到相机视锥网格。其中视锥的横纵坐标的计算方式与正常投影过程的计算方式相同。需要注意的是,论文中对网格点的深度大小利用LID算法进行了处理,其中LID的示意图和公式如下:
LID示意图:
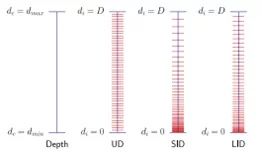
LID公式:

在得到相机视锥特征以及相机视锥网格后,通过F.grid_sample()函数进行采样,从而得到图中的Voxel Features,再利用Voxel Collapse操作去掉Voxel Features的高度信息,得到最终的BEV空间特征。
对得到的BEV特征经过BEV Backbone特征提取后,接Detection Head实现3D目标检测
这里Detection Head所预测的内容与BEVDet中检测头预测的内容基本保持一致,就不再重复介绍啦 ~
4. 2. BEVFormer:Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers
论文链接:https://arxiv.org/pdf/2203.17270.pdf;
Github仓库源码:https://github.com/fundamentalvision/BEVFormer;
BEVFormer是发表在ECCV 2022上的一篇论文,该论文主要是基于环视图像实现感知中的3D目标检测和地图分割任务的。BEVFormer算法模型的整体流程图如下:
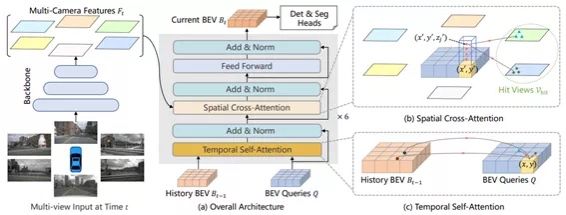
BEVFormer算法模型的前向过程主要包括以下三个部分:
- 主干网络和特征融合网络提取环视图像的多尺度特征;
- 利用上图中的Encoder模块(由Temporal Self-Attention模块和Spatial Cross-Attention模块组成)实现空间BEV特征的构建;
- Object Query与BEV特征利用Decoder模块进行交互得到Output Embedding,进而接3D检测头或者语义分割头完成3D目标检测和地图分割任务;
主干网络和特征融合网络提取环视图像的多尺度特征,输出的多尺度特征如下:
[0]: Tensor([bs, cam, 256, h / 8, w / 8])
[1]: Tensor([bs, cam, 256, h / 16, w / 16])
[2]: Tensor([bs, cam, 256, h / 32, w / 32])
[3]: Tensor([bs, cam, 256, h / 64, w / 64])
利用Temporal Self-Attention模块和Spatial Cross-Attention模块完成BEV特征的构建
由论文中的流程图可知,Encoder模块由Temporal Self-Attention模块以及Spatial Cross-Attention模块组成实现BEV特征构建。两个模块的功能描述如下:
- Temporal Self-Attention模块
该模块的主要作用是通过引入之前时序帧的信息特征(图中的History BEV)并与当前时刻的BEV Query利用Self-Attention机制实现融合,然后将融合后的BEV Query送入到后面的Spatial Cross-Attention模块中。将时序信息引入到模型里的好处是可以使算法模型更好的解决感知中存在的遮挡问题,也可以比较准确的预测周围物体的速度信息。
- Spatial Cross-Attention模块
Spatial Cross-Attention模块利用Temporal Self-Attention模块输出的BEV Query,对主干网络和特征融合网络提取到的多尺度环视图像特征进行查询,生成BEV空间下的BEV Embedding特征;
BEVFormer这里的实现方式与CaDDN算法类似,都是采用了自上而下的构建方式;根据点云感知范围和体素大小构建BEV下的3D空间网格,通过相机内外参变换矩阵将3D空间点映射到图像特征上,BEVFormer算法借鉴了Deformable Transformer的局部注意力机制的思想对图像特征进行采样完成最终的BEV特征构建。
Object Query与BEV特征利用Decoder模块进行交互得到Output Embedding,进而接3D检测头或者语义分割头完成3D目标检测和地图分割任务
由于官方代码只提供了3D目标检测的实现方式,所以这里主要介绍3D目标检测的实现方式。
算法中将Object Query与BEV特征借鉴Deformable DETR中局部注意力的思想输出Output Embedding。利用FFN网络充当3D目标检测头预测相关的感知参数(预测内容与BEVDet算法相似),实现最终的3D目标检测任务。
4.3. PETR:Position Embedding Transformation for Multi-View 3D Object Detection
论文链接:https://arxiv.org/pdf/2203.05625.pdf;
Github仓库源码:https://github.com/megvii-research/PETR;
PETR是发表在ECCV 2022上的一篇论文,该论文的主要思想是希望类似于DETR算法一样实现完全端到端的3D目标检测任务;PETR算法模型的整体流程图如下
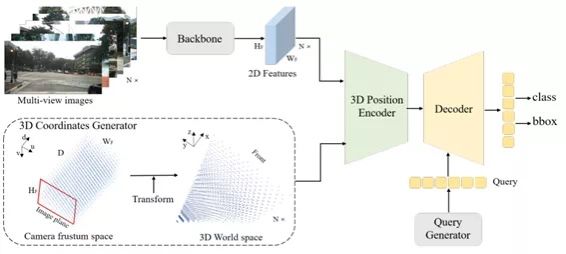
PETR算法模型的前向过程主要包括以下三个部分:
- 利用主干网络和特征融合网络提取图像的2D特征;
- 利用3D位置编码器输出具有3D空间位置的特征;
- 利用Decoder获得Output Embedding,最后接3D检测头实现3D目标检测;
利用主干网络和特征融合网络提取图像的2D特征,实现流程如下
Python
# 主干网络输出的多尺度特征如下
l0 = Tensor([bs * N, 1024, H / 16, W / 16])
l1 = Tensor([bs * N, 2048, H / 32, W / 32])
# 特征融合网络对主干网络输出的多尺度特征进行融合,输出图像的2D特征
out[0] = Conv1x1(l1) --> Tensor([bs * N, 256, H / 32, W / 32]);
out[1] = Conv1x1(l0) + Up(Tensor([bs * N, 256, H / 32, W / 32]) --> Tensor([bs * N, 256, H / 16, W / 16]);
利用3D位置编码器输出具有3D空间位置的特征,3D位置编码器整体流程图如下:
- 对主干网络和特征提取网络输出的2D图像特征利用1x1卷积进行拟合得到图像语义特征;
- 生成视锥网格点,并利用相机内外参转换到3D空间(对应上图中的3D Coordinates),利用3D Position Embedding进行3D位置编码
- 最后将3D位置编码 + 1x1卷积拟合后的图像语义特征进行相加,得到具有空间位置的语义特征(对应上图中的3D Position-aware Features)
利用Decoder获得Output Embedding,最后接3D检测头实现3D目标检测
这部分的实现逻辑与传统的Transformer的Decoder的逻辑类似,利用Cross-Attention模块将生成的3D空间下的Object Query和具有3D空间位置的语义特征进行交互,得到Output Embedding,然后利用FFN网络充当3D检测头实现最终的3D检测结果。
参考文章
[1] https://arxiv.org/pdf/2208.02797.pdf
[2] https://arxiv.org/pdf/2209.05324.pdf
[3] https://arxiv.org/pdf/2008.05711.pdf(LSS)
[4] https://arxiv.org/pdf/2112.11790.pdf(BEVDet)
[5] https://arxiv.org/pdf/2103.01100.pdf(CaDDN)
[6] https://arxiv.org/pdf/2203.17270.pdf(BEVFormer)
[7] https://arxiv.org/pdf/2203.05625.pdf(PETR)