论文阅读(9) 鱼类洄游粒子图像测速技术综述 (2016)
鱼类洄游粒子图像测速技术综述 (2016)
原文链接:https://www.scirp.org/journal/paperinformation.aspx?paperid=65914
写在前面,这几天忙着刷题,整理一下自己学习的题型,论文看得速度也会减缓下来,不过不会断的,继续看,一句话:努力,奋斗!
我认为《三体III:死神永生》中 维德 说的非常对:“失去人性,失去更多;失去兽性,失去一切。”
摘要
了解鱼道内的水流特性对鱼类的高效洄游至关重要。流动特性测量通常可以提供这种通道中速度分布的定量信息;粒子图像测速技术(PIV)已经成为揭示流场,特别是鱼道流场的最通用的技术之一。本文首先概述了鱼类沿鱼梯的洄游,然后介绍了PIV测量在鱼类洄游过程中的应用。综述表明,PIV获得的详细定量的鱼梯湍流信息对于分析湍流特性和验证数值结果至关重要。
关键词:粒子图像测速技术;鱼类洄游;鱼道
1. 引言
鱼类从一个地区或地区到另一个地区的季节性运动称为鱼类迁徙。鱼在相对较大的时间尺度上迁徙,从一天到一年甚至更长,从几米到数百公里的距离。迁徙的主要目的通常是保护和喂养、繁殖或躲避极端天气 [1]-[13]。 在淡水和咸水之间迁徙的鱼被称为“泛水鱼”。这包括许多从海洋迁徙到淡水产卵的顺流物种,以及各种相反的顺流物种,它们在海中产卵,然后在幼年迁徙到淡水中。一些海洋鱼类,如鲑鱼、鲟鱼、海鞘、七鳃鳗和不同的鲤科鱼类遵循顺水而行的迁徙模式,而鳗鱼则遵循顺水而行的迁徙模式 [14]-[17]。有几个问题造成了移民问题,而像水电站大坝这样的人为障碍是主要问题之一。然而,对于在水电站大坝上迁徙的鱼类,经常使用鱼道或鱼梯来开辟通道 [18]-[29]。鱼道是一种装置,旨在使鱼能够绕过障碍物或越过障碍物逆流而上。即使挡板结构的高度低至0.3-0.6米 [45][46] ,鱼道也是必要的。此外,还应考虑一些重要因素,如障碍物或障碍物下方的水深、障碍物或障碍物的高度、通过障碍物或障碍物上方的水流速度、障碍物上游鱼类栖息地的质量和数量、鱼类的运动方式以及鱼类群落中不同物种的组成等。
长期以来,人们一直知道,在河流中设置各种障碍,如水电站大坝,破坏了海洋生态系统,影响了鱼类的数量。如今,全世界的河流正在被水电大坝分割,瑞典70%的河流被开发为水电大坝 [47][48]。这种碎片化影响了大多数需要迁徙产卵的鱼类物种,如奇努克鲑鱼、钢头和湖鲟鱼。然而,设计得当的鱼道可能会抑制大坝对鱼类物种的影响。在规划、设计和布置河道中的障碍物时,工程师需要考虑许多设计因素。任何河流中的每一个障碍物或障碍物都代表着特殊的情况和挑战,因此,任何鱼道的设计和放置都应该谨慎处理。然而,没有一个完美的鱼类通道设计可以容纳所有地点的所有鱼类。每种鱼都有独特的物理特性,在设计鱼道设施时应加以考虑 [49]。
各种鱼类,例如鲑鱼和鲑鱼,能够游过非常快的水域,因为它们具有特殊的爆发速度,而其他一些鱼类,如北梭鱼、大眼鱼和小口鱼,由于中等的爆发速度,无法通过非常快的水域。在设计鱼道设施时,还有一些其他因素,如能量耗散、流动、休息区、入口位置、吸引速度和池塘空间,也应该仔细考虑。因此,有效鱼道的正确设计对于众多鱼类种群的安全和改善是非常重要的,本审查的动机是如何测量和改善鱼道内的流场。重点介绍了流动测量技术粒子图像测速技术(PIV)在鱼梯或鱼道流动中的应用。因此,从下一节开始,我们将回顾PIV技术。
2. PIV技术用于鱼类洄游
PIV是一种非侵入式激光光学测量技术,用于揭示和检查各种流动,如湍流、微流体、喷雾雾化和燃烧过程[50] - [58]。PIV一词最早出现在20世纪80年代的文献中 [56]。过去30年 [56] 在激光、图像记录和评估技术、计算技术和资源方面取得的科技成就,使PIV成为流体力学中最通用的实验工具之一。Grant, Stanislas, Dabiri 和 Green [54] [59] - [64] 等人在许多研究文章中回顾了PIV的测量原理和主要发展,Raffel等人(2007) [65] 撰写了一本关于该技术的综合书籍。由于鱼道内的流动一般比较复杂,PIV是获得速度场的一种合适的实验技术。
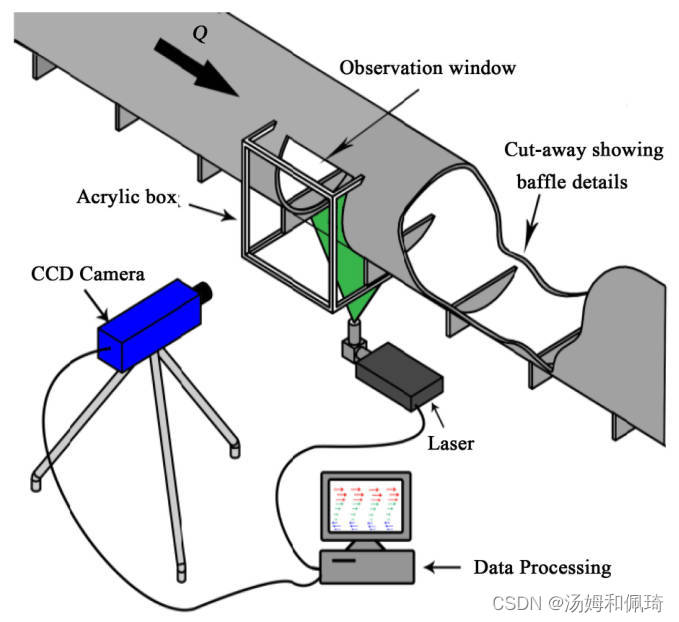
PIV跟踪流体中示踪粒子的模式,以获得给定测量区域的整个速度场。现代PIV系统由几个部分组成,主要部分包括测量对象、多脉冲激光系统、一台或多台与激光同步的数码相机以及管理整个系统和分析数据的计算机 [66]-[70]。标准2D-PIV (2D2C)用于用一台摄像机测量一个平面内的两个分量的速度,而立体-PIV (2D2C)用于用两台摄像机测量一个平面内的三个分量的速度。最近,另一种类型的PIV系统已经商业化,它使用三个以上的摄像机,称为断层PIV系统 [71]。由于昂贵的价格和复杂的实验装置,最常用于揭示鱼道流动的PIV仍然是2D2C-PIV。2D2C PIV系统的基本设置如图1所示。下文将简要讨论典型PIV系统的关键技术。
2.1.照明系统
双脉冲Nd:Yag激光器是鱼类洄游实验研究中最广泛使用的照明系统,因为这些激光器可以发射具有高密度能量的单色光。可以形成薄光幕来照明和记录没有色差的示踪粒子的图案。双脉冲Nd:Yag激光器通常具有用于产生532 nm波长的绿光片的铰接输送臂。光幕光学器件放置在铰接传送臂的末端,可以以任何角度放置以产生薄光幕。通常,使用一个或多个柱面透镜来调整激光片的视场角和厚度。测量区域中的光幕厚度通常约为1 - 3 mm,但可以更薄 [73]-[76] 。然而,使用如此薄的光幕作为照明方法也为测量强三维流场带来了挑战。在这种情况下,摄像机在第一帧中记录的许多粒子可能会移出测量平面,无法在下一帧中捕获。这将把PIV测量的精度限制在薄平面流区域 [77]。因此,当使用激光作为照明源时,需要设置的一个重要参数是脉冲之间的时间延迟δt。该时间延迟应该足够长,以便能够精确测量两个脉冲之间示踪粒子图案的位移,但也需要足够短,以便最大限度地减少后续照明之间从光幕移出的粒子数量。
2.2.图像记录装置
耦合电荷装置(CCD)照相机和互补金属氧化物半导体(CMOS)照相机是在鱼类洄游中用于流量测量的常用图像记录装置。CCD相机是PIV实验中使用最广泛的图像记录设备,具有高空间分辨率、方便的数据传输和图像处理、最短的曝光时间、532 nm的高感光度和低背景噪声 [78]-[81]。CCD元件通常是将光子转化为电子的电子传感器 [82] 。CCD相机的传感器通常由许多单独的CCD元件(也称为像素)的阵列组成。如今,商用CCD相机的传感器分辨率范围通常为2 M像素(1600 × 1200)至29 M像素(6576 × 4384),相应的帧频范围为35 Hz至2 Hz [83]。因此,应该在空间和时间分辨率之间进行权衡,并且应该基于具体应用来选择CCD相机。例如,为了获得完整的流动结构,大范围的测量区域需要高分辨率的CCD相机。相反,高频CCD相机更适合于研究小尺度流体流动的湍流特性。还应该考虑CCD传感器的动态范围,以评估每个像素的信号质量。通常,每个像素8或10位数据输出的动态排列足以满足大多数PIV目的。然而,随着先进冷却技术的使用,14或16位摄像机也可用于平面激光诱导荧光(PLIF)等要求极低噪声和高动态范围的应用。
对于获取准确湍流信息的时间分辨测量,应使用高速CMOS相机,而不是CCD相机。基于最近开发的CMOS传感器的高速记录甚至可以用来捕捉千赫兹范围内的频率。这对于湍流的研究是非常有希望的。这种CMOS传感器还允许以令人满意的噪声水平每秒记录和处理几千帧。代价是传感器的分辨率。然而,作为一种更先进的图像记录技术,低空间分辨率已经成为CMOS相机完全取代CCD相机的主要障碍。这一严重缺陷将CMOS相机的应用仅限于小规模测量。因此,CCD摄像机由于图像质量更好、应用范围更广,仍然是目前PIV测量的主要图像记录设备。Hain等人 [81] 报告了CCD相机和CMOS相机之间的详细比较。
2.3.种子粒子
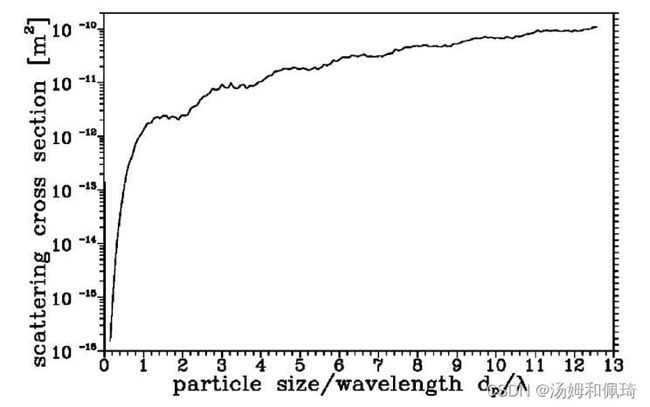
PIV测量的结果很大程度上依赖于掺入流体流中的种子粒子来揭示速度场。速度场的精度取决于晶种粒子跟随不间断相的瞬时运动的能力。示踪粒子的最有利直径的选择是需要小直径的流体中示踪粒子的快速响应和需要大直径的粒子图像的高SNR(信噪比)之间的协商。Melling(1997年) [84] 阐述了这一点,他回顾了PIV测量过程中不同晶种粒子的使用。将示踪剂或播种颗粒的规格与散射光的特征以及空气动力学跟踪的能力进行比较。示踪粒子的特性粒子的散射特性可以用下面的等式表示:

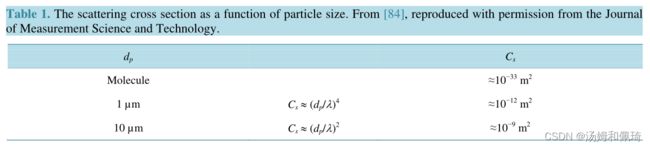
其中,Cs是散射截面,Ps是总散射功率的比值,I0是激光强度。图2显示了对于折射率m = 1.6的球形颗粒,Cs的变化作为颗粒直径dp与激光波长λ的函数。表1显示了双原子分子和两个较大颗粒的近似Cs的比较。很明显,较大的颗粒可以给出指数级更强的光信号,这与较大的测量面积和较高的信噪比有关。
示踪粒子的跟踪对于PIV测量的准确性尤为重要。跟踪能力取决于颗粒形状、颗粒密度、流体密度和流体粘度。总之,示踪粒子的尺寸应该被优化以在跟踪行为和散射特性之间取得平衡。Melling(1997年)、Willert等人(2007年)和Bosbach等人(2009年) [84]-[87] 揭示了示踪粒子属性的更多细节。
2.4.图像评估方法
从PIV的工作原理可以明显看出,该技术是直接测量两个基本尺寸,位移和时间。然而,由于所使用的粒子浓度很高,并且在捕获的图像中粒子之间存在重叠,因此不可能计算每个粒子的速度。因此,需要图像评估方法来从原始粒子图像中获得位移信息。PIV中的优选评估方法是在两个独立的帧上捕获两幅图像,并执行多步互相关分析,因此导出粒子图案的位移。该互相关函数具有显著的峰值,提供了速度矢量的方向和幅度,而没有模糊性。相关方法通常基于用于计算相关函数的数字快速傅立叶变换(FFT)算法。对于鱼类洄游应用,最近最广泛使用的评估方法是自适应相关。自适应相关技术 [88] 使用大小为最终IA大小的N倍的初始询问区域(IA)迭代地确定速度向量,并采用中间信息作为下一个较小大小IA的结果,直到达到IA的最终大小。IA是记录图像中的一个子区域,其尺寸设置直接决定了测量的空间分辨率和精度。更小的IA尺寸和更高的重叠率可以实现更高的空间分辨率,但是需要更高质量的图像记录和消耗更长的计算时间。根据评论文章,对于PIV应用,IA的尺寸通常设置为32 × 32像素或64 × 64像素,重叠部分为50%或25%。
此外,自适应相关法辅以高亚像素精度和自适应变形窗算法,可以获得更高的精度。目前,大多数商用PIV软件包中都有自适应相关功能。自适应粒子图像测速询问 [88] [89] 是一种更先进的自动相关算法,用于确定粒子图像的速度矢量。该技术反复修改IA的形状和尺寸,以适应示踪粒子的局部密度和流动梯度。该方法还包括应用窗口函数、频率滤波以及通用异常值检测形式的验证的选项 [90]。总的来说,自适应PIV可以获得比自适应相关更高的精度和空间分辨率,但是消耗更多的计算资源。另一种具有鱼道应用潜力的高级评估方法是2D或3D最小平方匹配(LSM) [91] [92]。与现有的基于相关性的方法相比,LSM是一种灰度级跟踪技术,可执行IA的平移、变形和旋转 [91]。LSM算法反复对比第一时间步和第二时间步之间IA的灰度级跟踪。这是在IAs上应用仿射变换的迭代最小二乘过程。因此,LSM不仅可以像相关方法一样产生零级平移速度,而且可以同时考虑流体运动的一级项。由于这个原因,速度梯度张量、形变张量和转动张量可以用LSM精确地导出,而不需要任何假设和操作。然而,由于计算时间长得多以及需要极高质量的粒子图像,LSM比相关方法受到的关注少得多。尽管这两种先进的方法具有明显的优势,但它们很少用于评估PIV实验数据。然而,这些方法对于复杂流动的精细测量具有很大的潜力,其中存在较大的速度梯度张量并且期望更高的精度。虽然有许多算法可用,但没有一个算法在任何地方都具有最佳性能 [61]。在 [60]-[62] 中提出的PIV挑战的主要结果中,提供了对最新评估方法性能的详细分析。
总之,PIV流场评价涉及多种技术。然而,没有普遍适用的PIV系统可用于不同的应用。在实践中,需要根据具体情况做出许多妥协和决定。应密切注意为其特定需求选择适当的PIV系统参数,例如测量区域、时间和空间分辨率以及所需的精度。上述概述不包括三维PIV技术的原理,如立体PIV、地形PIV和散焦PIV [93],因为这些技术只是偶尔应用于鱼类洄游,这将在下一节举例说明。
3. 粒子图像测速技术在鱼类洄游
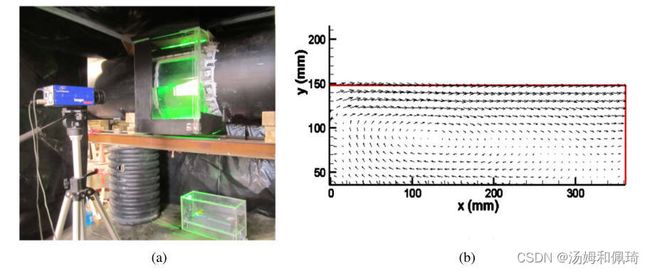
流场测量中的应用本节介绍了利用粒子图像测速技术测量鱼类洄游相关流场的若干实例。该综述主要集中在最近几年的英文期刊上,并不全面,但代表了PIV在鱼类洄游中应用的现状和趋势。Mohanad A. Khodier (2012年) [72] 通过实验和计算研究了流经鱼道的湍流特性。PIV用于测量长度为18.3米、直径为0.57米的管道(图3(a))中的湍流特性。管道由高密度聚乙烯(HDPE)制成 [94] 。因为这种聚合物不是光学透明的,所以在由透明lexan片组成的管的中间设置观察窗。用于测量流场的PIV系统由一台分辨率为1376 × 1040像素的CCD摄像机和一台Nd:YAG激光器组成,该激光器配有光幕光学系统以照亮感兴趣的区域。使用PIV系统,可以产生精确、无失真的速度矢量数据,如图3(b)所示。如图4所示,测量了几种流速下的流场。测量的剪切应力随后用以下方程计算:

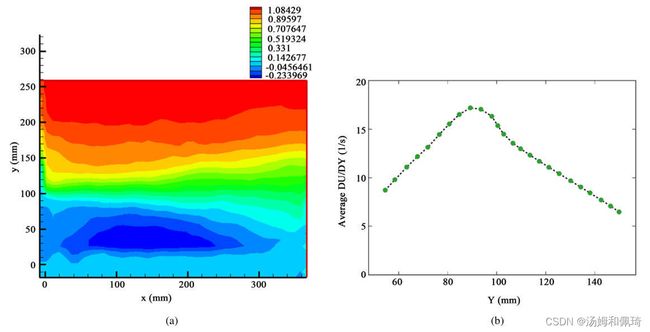
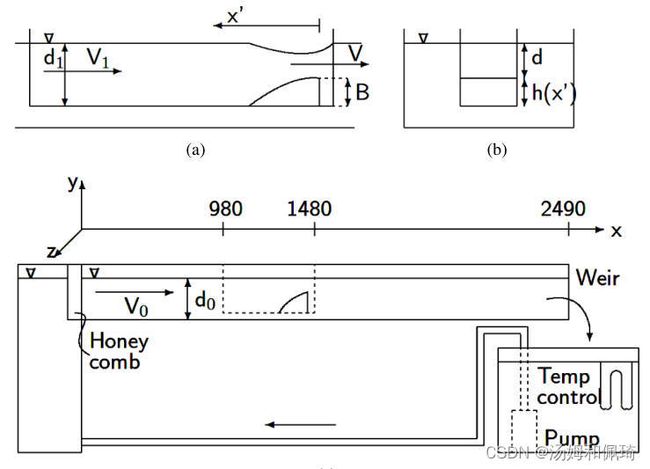
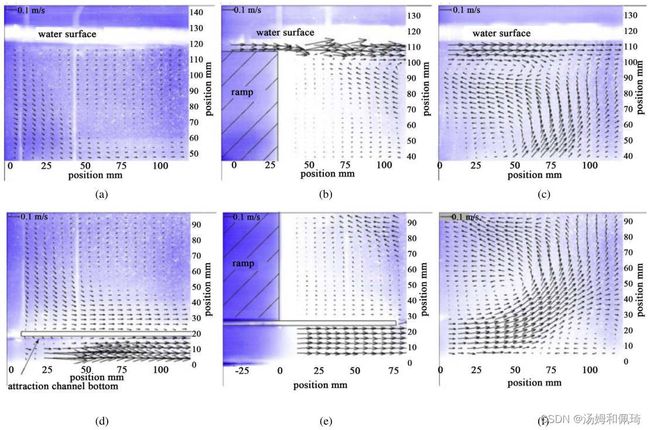
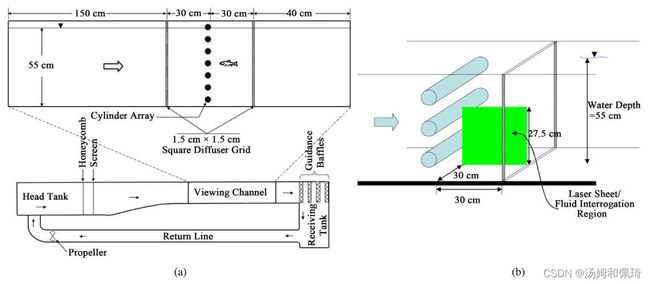
值得注意的是,PIV系统精确地产生速度场,然后推导出每种流动情况下的剪切应力(速度梯度)。Green等人(2011年) ==[95]在水槽中进行了PIV实验,水槽中有一个水下较小的通道,该通道带有一个障碍物,用于增加所谓的吸引通道下游的速度,如图5所示。测试了不同设计的障碍物和通道,以找到最能吸引鱼的最佳鱼道配置。应用了来自LaVision GmbH的二维PIV系统 [96]。该系统由最大重复频率为100 Hz的双脉冲激光器(Nd:YAG)和来自LaVision [97] 的FlowMaster Imager Pro CCD摄像机组成,每帧的空间分辨率为1280 × 1024像素。他们还使用了一个三轴横移系统[98]来实现激光和摄像机在所有三个方向(x、y和z)上的重新定位,最大长度为500毫米。使用的示踪粒子[65]==是直径为6微米的空心玻璃球,来自LaVision GmbH。在鱼梯通道中保持0.2 m/s的恒定速度,并且在激光脉冲之间施加1400 s的时间间隔。激光重复率保持恒定为50 Hz,每次测量有250个图像对。图6显示了在吸引通道不同位置的PIV测量流场。这些PIV结果表明,吸引通道相对于原始流向的微小倾斜会影响流型。
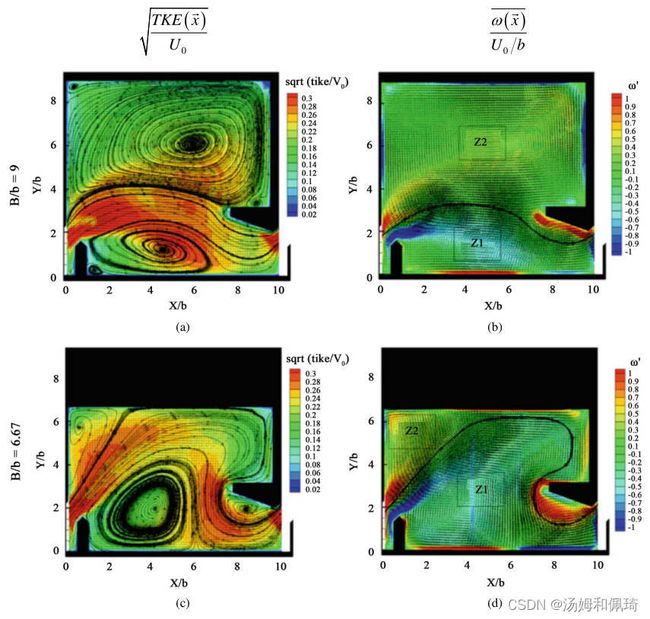
Tarrade等人(2011年) [76] 在法国普瓦捷大学研究所使用PIV对垂直槽形鱼道中产生的流体动力紊流进行了实验研究,他们主要描述了一些运动学流动参数,如平均速度、动力紊流能量、涡度和几种坡度的非稳态流动性质,以及使用两种不同几何形状的流量。来自LaVision的2C2D PIV用于可视化和双组分流速测量。该PIV系统由两个分辨率为1600 × 1200像素的CCD摄像机和一个产生1.5 mm厚激光片的Nd-Yag激光器(光谱物理,180 mJ/脉冲)组成。激光板照射dp = 20 μm的中空玻璃颗粒,使用CCD摄像机通过45°镜子观察整个池流,如图7所示。
PIV测量得出了不同几何构型的两种不同湍流动能和涡度模式,如图8所示。Tritico等人(2010) ==[99]==研究了鱼类在洄游过程中,水流特性对鱼类游动速度和稳定性的影响。主要特征是由**涡流直径(de)、涡流涡度(ωe)和涡流方向(水平或垂直)**描述的涡流组成。PIV实验使用流动可视化水槽进行,水槽的测试截面长0.25米,宽0.60米,高0.55米,如图9所示。所使用的便携式PIV系统具有532 nm波长的激光器、90 mW的电池电源和分辨率为100万像素的黑白10位CCD摄像机。PIV测量表明,鱼类的栖息地选择、洄游和游动稳定性都受到湍流涡旋的影响。
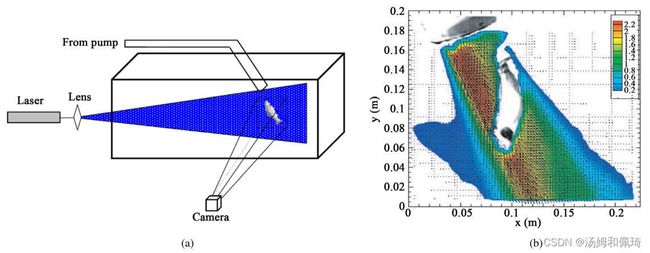
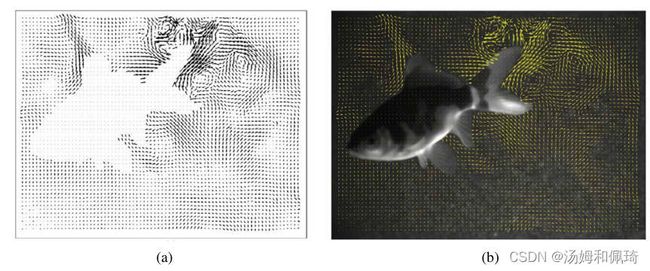
Deng,z .等人(2004) [100] 使用高速PIV研究鱼类周围的流动特性。二维数字PIV (DPIV)系统与LDP二极管泵浦的Nd:YAG脉冲激光器一起使用,该激光器能够在1000 Hz下在532 nm的波长下产生15瓦的平均功率。使用圆柱形负透镜将激光束扩散到x-y测量平面上220 mm的薄板中,用正球面透镜将薄板聚焦到靠近测试区域中点的腰部。对于220 × 220 mm2的视场,该激光片的厚度约为0.8 mm。作为接种颗粒,使用dp = 70μm、密度为1180千克/立方米的玻璃球。使用Photron 1280 PCI高速、高分辨率数码相机 [101] 记录图像。这款相机采用10位CMOS传感器,全局电子快门快至7.8μs,采样率为每秒500帧,分辨率为1280 × 1024像素。同步器用于控制CCD摄像机和激光脉冲的定时。实验装置的示意图如图10(a)所示。本实验室试验证明了粒子图像测速技术在表征鱼周围流动方面的适用性。测量还揭示了在鱼后面的尾流中产生的不稳定旋涡脱落,以及鱼头周围非常高的涡度和高应力区域。应力最大的区域就在鱼头的下游。图10(b)是平均速度矢量的一个例子。
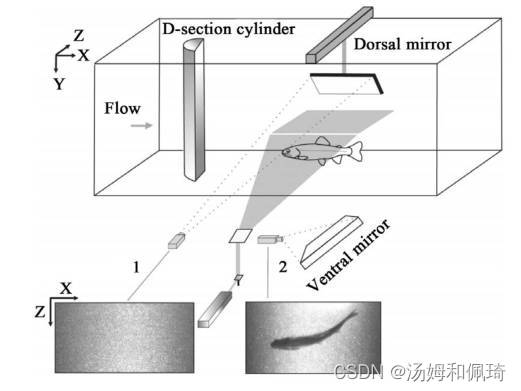
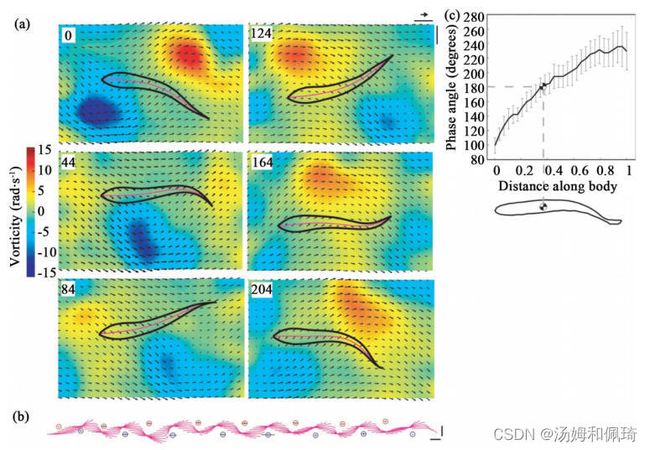
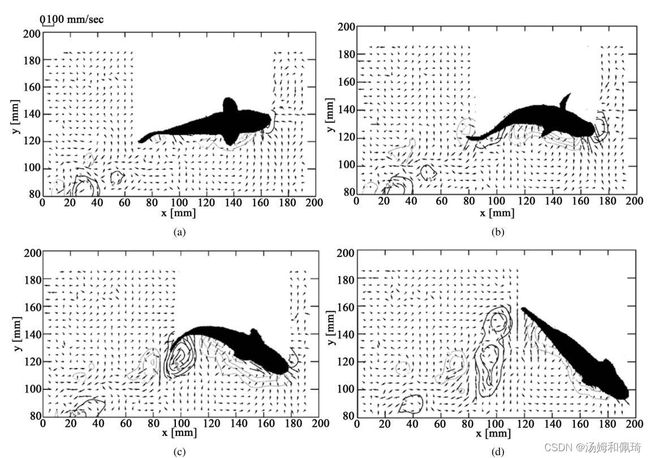
Liao等人(2003) [102] 通过实验研究了涡流对鱼类运动的影响。如图11所示,一个DPIV系统被应用于一个水槽 [103] 中,水槽中放置了一个D形截面的圆柱体以产生涡流。用于测量流场的DPIV系统由两台高速摄像机(NAC HSV-500)和一台激光片厚度为1 - 2 mm的氩离子激光器组成。使用平均dp = 12 μm(查了下原文,应该微米,毫米太大了!)的镀银玻璃球作为晶种粒子。其目的是发现落鱼和D截面圆柱后面产生的涡流之间的相互作用,见图12(a ),其中箭头代表流动的方向和大小(刻度箭头表示0.56 m/s)。红色对应顺时针方向的涡度(弧度/秒),蓝色对应逆时针方向的涡度。图12(b)表示七个连续尾拍的中线。旋涡位置的标准误差以每个旋涡内的杆长给出。在图12©中,物体和涡流之间的相位,其中180°代表涡流之间的回转,0°或360°代表涡流拦截。方格表示鱼的重心。浅灰色条代表标准误差。这项PIV研究的主要结果是,鱼类在上游洄游期间利用环境流动漩涡保存能量并保持在溪流中的位置。
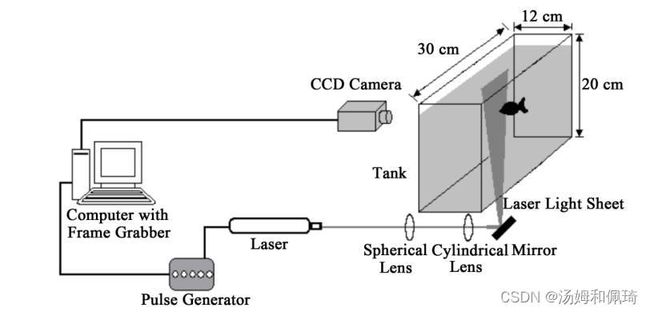
Siddiqui (2007年) [104]采用了一种两分量PIV技术来获得自由游动的鱼周围的速度场。如图13所示,实验在0.30米长的由玻璃制成的槽中进行,槽的宽度和高度分别为0.12米和0.20米。PIV装置由能量为25 mJ的Nd:YAG激光器(用于照亮流动区域)、分辨率为1600 × 1200像素的CCD摄像机、脉冲发生器、一些激光光学透镜、反射镜等组成。用于传输光和带有帧抓取工具的计算机。VideoSavant软件用于评估快照。平均dp = 10 μm的空心玻璃球用于接种流体。保持恒定的0.18米的水高度,并用树脂玻璃片将水箱分成不同的区域,以便65毫米长的金鱼可以在0.30米长和0.08米宽的部分中自由游泳。从100 × 74 mm2的观察窗捕获游动的鱼的图像,持续时间为5分钟,并且以30 Hz的频率捕获图像。最后,对图像进行分析,找出速度场,见图14。PIV测量显示,射流是由鱼的鳍和尾巴产生的,并且在鱼后面的尾流中可以看到漩涡。
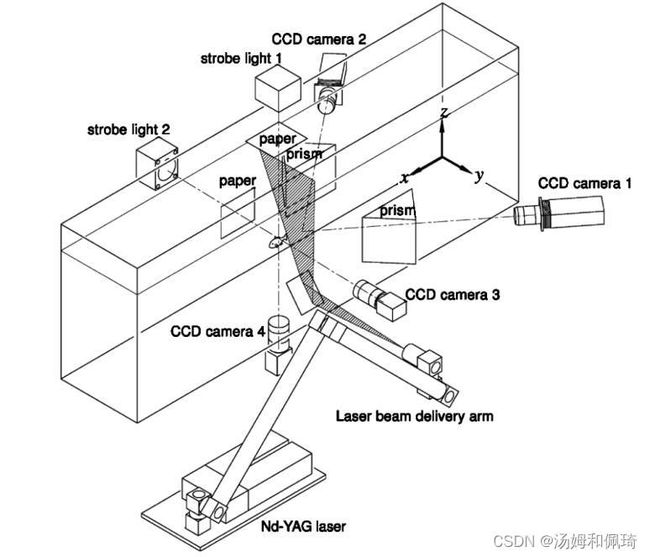
Sakakibara等人(2004年) [105] 对游动的鱼进行了一项实验研究。这是在一个长1.0米、宽0.20米、水深0.30米的有机玻璃水槽中进行的。让一条长0.11米的金鱼在这个水槽中自由游动。作者没有对鱼的运动使用任何外部控制,而是等到鱼进入视野并做转向运动。利用立体PIV技术测量了鱼周围的三分量速度分布。配备有内部激光传输臂的Nd-YAG激光器产生2 mm厚的激光光幕来照亮流场。为了进行立体PIV测量,总共在四个不同的位置使用了四个CCD摄像机,两个用于立体PIV,两个用于捕获鱼。完整的实验设备如图15所示。在图16所示的PIV结果中,作者发现了鱼在不同时间的不同转向运动过程,例如鱼在转向运动开始时呈弯曲形状,身体变成C形;通过将弯曲点向后传递,身体开始恢复直线形状,并在反向旋转涡流的中心形成“侧喷流”,这为鱼的身体和周围增加的质量提供了角动量;最后,向后释放推力喷射,鱼的身体向前移动。
4. 讨论
PIV可用于收集瞬时流场信息,例如,与激光多普勒风速测量法相比,可大大减少实验时间。此处显示,PIV可作为生物或生态研究(如鱼类洄游)的通用工具,因为它在与表面或物体接触时可视化流体区域 [106]。关于鱼类洄游,PIV测量可分为对鱼类运动和与鱼类洄游相关的流场的纯研究。鱼道内或附近的速度和湍流量以及鱼周围的流动和鱼的转向运动都是令人感兴趣的。此外,PIV已成功地应用于研究鱼类游泳速度和稳定性,PIV结果发现湍流的一些影响。PIV已被用于测量鱼道中的涡流和其他非定常量,其中涡流、湍流动能(TKE)和速度场被有效地测量。
PIV也被用于验证鱼道的一些数值分析 [25] [107]-[115] ,例如,Khodier,M.A等人(2012) [44]用PIV实验研究验证了他们的数值研究。除此之外,立体PIV和断层PIV能够获得被激光片照射的平面区域中的三分量(3-D)速度信息。这些类型的3D-PIV系统已经用于研究鱼类洄游,例如,Sakakibara等人(2004) [105] 使用立体PIV研究活鱼的游泳运动,Mendelson,l .等人(2015) [116] 使用3D合成孔径PIV分析自由游泳的鱼的尾流。此外,Scarano (2013年) [71] 回顾了断层PIV在各种实验研究中的应用,他发现这种类型的断层PIV在实验测量中的使用正在迅速增加。然而,由于每种测量技术都存在一些误差,无论测量的速度范围如何,PIV都不能避免误差 [117]。与其他实验技术相比,PIV是一种测量技术,其精度直接由位移误差和脉冲之间的时间延迟不确定性决定。同样,位移误差是各种PIV应用的不确定性来源,且难以计算,因为测量PIV本身可能是一系列产生误差的步骤 [78]。此外,在数据的后处理中经常应用的滤波可能引入额外的误差。最初,假设种子或示踪粒子跟随湍流。然而,这是由于它们的尺寸、形状、质量和密度,以及与流体和流动的特性相比。粒子跟随流动的能力通常用斯托克斯数来描述,其最简单的形式可以写成:

其中t0是粒子的弛豫时间,u0是速度,l0是典型的粒子直径的特征尺寸。
在图像采集和分析过程中会发现其他错误。粒子图像的质量、询问区域的大小和统计相关程序取决于实验测量的速度数据的准确性 [77] [117]-[119]。此外,研究人员的PIV技术和经验也与测量的准确性有关。Ullum等人 [119] 研究了网格生成湍流中单个点的时间平均PIV数据,以发现样本大小对其早期衰减测量精度的影响。据观察,对于10%湍流强度的流动,需要100个平均或平均速度分量的矢量图,以使特定点的平均值不确定性在1%以内。然而,需要20000张矢量图才能得到这种精度的正应力分量。这项研究表明,高阶统计量需要更大的样本量。此外,激光强度不足、光学光幕的硬度和CCD相机的低空间分辨率可能是一个问题。由于这些显著的缺点在一些情况下限制了PIV系统的使用,因此有必要开发相机拍摄所需的光学布置和技术来克服这些缺点。然而,PIV系统非常昂贵、庞大,并且难以用于实验测量。对鱼道进行完美的PIV测量需要在设备、时间、实验技能和经验方面进行相对大量的投资,尤其是当鱼周围的流动是焦点时。
5. 结论
综述了理想PIV系统测量鱼类洄游相关设备中流体动力学现象的主要技术。没有普遍适用的PIV系统被发现用于每种情况的实验测量。对于各种实际应用,必须小心地做出许多妥协和决定。研究人员在根据他们的特殊要求选择合适的PIV系统参数时应该考虑重要的因素。综述的出版物表明,PIV已逐渐成为测量鱼类洄游过程中流体动力学现象的最受欢迎和最丰富的实验仪器。PIV技术克服了传统的基于点的速度测量技术的缺点,成为一种高科技、非侵入式的全流场测量技术,能够在整个平面上显示瞬时速度信息。Tomo-PIV (3D-PIV)现在能够测量所有三个分量的瞬时速度,具有感兴趣区域的实时三分量流动结构,例如,在鱼体周围。然而,PIV有时并不是一些非常复杂的流动测量的最佳工具,因为一些商业上可获得的PIV经常受限于光路的阻碍和图像尺寸的限制。因此,开发大规模或全规模的光学技术以及捕获图像的技术来克服这些缺点是必要的。