2022年电赛F题 信号调制度测量装置
红叶何时落水
题目要求:
一、任务
设计制作信号调制度测量装置,该装置测量并显示信号源输出的被测信号调制度等参数,识别并显示被测信号的调制方式,输出解调信号。测量系统如图1所示。
二、要求
(1)被测信号为电压峰峰值100mV的普通单音调幅(AM)电压,其载频为10MHz、调制信号为频率1~3kHz的正弦信号。测量并显示的调幅度,要求测量误差绝对值≤0.1;输出解调信号,要求解调信号波形无明显失真。 (20分)
(2)被测信号为电压峰峰值100mV的单音调频(FM)电压,其载频为10MHz、调制信号为频率3~5kHz的正弦信号。测量并显示的调频度,测量误差绝对值≤0.3;测量并显示的最大频偏(kHz);输出解调信号,要求解调信号波形无明显失真。(25分)
(3)被测信号为载波电压峰峰值100mV的高频电压,其载频范围为10MHz~30MHz(频率步进间隔0.5MHz)。若为已调波(AM或FM波)时,其调制信号为频率范围5kHz~10kHz(频率步进间隔1kHz)内某一频率的正弦信号。测量装置应能自主识别的调制方式,即能判断出为调幅、调频或未调载波。测量并显示的调制度(或),测量误差要求分别同前面第 (1) 、(2)项的要求;当被测信号为调频波时,要求测量并显示其最大频偏(kHz);输出解调信号,要求解调信号波形无明显失真。(45分)
任务分析
最主要的任务是AM信号与FM信号要实现解调,并且测量出相关参数;
简单来说有两套方案
第一套硬件解调,并将所需测量的参数转化为电压量。由单片机测量参数,进行计算和显示;
AM解调
首先,将信号放大,上拉到2V左右。然后用包络检波电路将其解调出来,再加一个底通滤波器即可。
具体电路见:效果图
原理图与连线图
FM解调我没做,好像是用鉴相器制作。
难点:载波频率为10MHZ,普通的芯片频带无法实现。
比如说AM的解调,如果我们打算用820单运放将其放大并上拉,我们就会发现当载波为10Mhz时,输出的信号实现了放大功能。但一旦将载波信号变为20MHZ,增益便会发生变化(频带不够宽)。当然,增益发生变化对于信号的解调影响不大,还是可以解出来的。但是,AM的调幅度是用解调出来的正弦波的峰峰值/直流偏置得来的。因为增益发生变化,会导致参数发生变化。所以后面单片机的测量便有很大的麻烦。(一会在软件部分说明)
解决方案,使用无源电路将其衰减(防止调制波在放大模块那里出现失真),进入专用放大模块,之后,不进行上拉,直接让二极管将上半个调试波形解调出来。这样就避免了820的带宽问题。但是,这个方案需要一直去调阻抗,一不小心,信号直接衰没了。
第二套软件解调并测量
AM 对于周期信号来说,我们可以通过快速FFT运算,从频谱图中分析他的各种谐波。
难点
1.根据奈奎斯特采样定理,我们知道想要分析出频谱不混叠的频谱图,采样率必须大于最大谐波的二倍。那么就意味着AD采样率要大于60Mhz。普通的32单片机明显达不到这个采样率。就拿F103芯片来说,板载AD采样率在正常工作范围内为1Mhz。如果使AD超频工作的化,也只能达到2.5Mhz,与此同时,把主时钟超频到112M,采样率勉强达到4.5M。但此时采集到的波精度已经有了不小的损失。如果外接AD的话,也不太行,经过测试最大采样率为25M。如果用FPGA的话,采样率倒是可以达到60M。
所以,想实现软件解调,就要用带通采样(传送门)
这里我采用的是204khz的采样率,刚好可以包含题目中所有的频率。
AM频谱图有三个谐波,最长的那根的频率便是载波频率。而两根短谐波之间的频率差便是调制波信号的频率。
对于FM 同样采样率,会出现多个周期的谐波
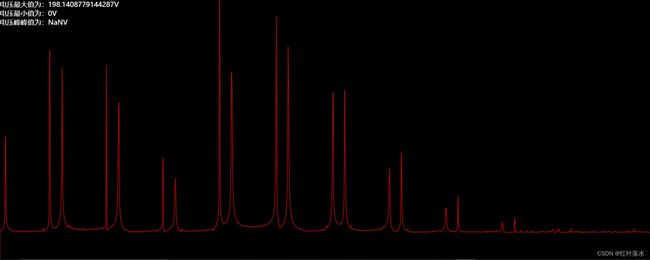
我们可以通过分析该频谱来得出所有信息。
信息采集完毕后,用板载DA输出一个相应频率的正弦波即可。(如果觉得DA输出的波形不够好看,加个滤波电路滤一下即可)。
明天开始测评。
代码部分:
采样率204khzAD配置
TIM1_PWM定时器配置
void tim1_pwm_config(uint16_t psc,uint16_t arr,uint8_t val)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1,ENABLE);
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_Period = arr -1;
TIM_TimeBaseInitStruct.TIM_Prescaler = psc -1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct);
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse = arr / 2;
TIM_OC1Init(TIM1,&TIM_OCInitStruct);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_CtrlPWMOutputs(TIM1,ENABLE);
TIM_SelectOutputTrigger(TIM1,TIM_TRGOSource_OC1);
TIM_Cmd(TIM1,ENABLE);
}
DMA1配置
void Adc_dma(void)
{
//ADC1 DMA1_CHANNEL1
DMA_InitTypeDef DMA_InitStruct;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);
DMA_InitStruct.DMA_BufferSize = size;
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)ADC_arr;
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStruct.DMA_Mode = DMA_Mode_Normal;
DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t)(&(ADC1->DR));
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStruct.DMA_Priority = DMA_Priority_High;
DMA_Init(DMA1_Channel1,&DMA_InitStruct);
DMA_Cmd(DMA1_Channel1,ENABLE);
}ADC1配置
void adc_init(void)
{
int i=0;
ADC_InitTypeDef ADC_InitStruct;
for(i=0; iFFT计算函数
typedef double real;
typedef struct{
real Re;
real Im;
} complex;
double arr_res[_N] = {0};
void fft( complex *v, int n, complex *tmp )
{
if(n>1) { /* N???1,????*/
int k,m; complex z, w, *vo, *ve;
ve = tmp; vo = tmp+n/2;
for(k=0; k1) {
int k,m; complex z, w, *vo, *ve;
ve = tmp; vo = tmp+n/2;
for(k=0; k DA配置
void Dac2_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
DAC_InitTypeDef DAC_InitType;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_DAC, ENABLE);
DAC_DeInit();
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_5);
DAC_StructInit(&DAC_InitType);
DAC_InitType.DAC_Trigger = DAC_Trigger_T4_TRGO;
DAC_InitType.DAC_WaveGeneration = DAC_WaveGeneration_None;
DAC_InitType.DAC_LFSRUnmask_TriangleAmplitude = DAC_LFSRUnmask_Bit0;
DAC_InitType.DAC_OutputBuffer = DAC_OutputBuffer_Disable;
DAC_Init(DAC_Channel_2, &DAC_InitType);
DAC_Cmd(DAC_Channel_2, ENABLE);
DAC_DMACmd(DAC_Channel_2, ENABLE);
}
DMA2配置
void MYDMA_Config(u32 cpar, u32 cmar, u16 cndtr) // cpar?????,cmar?????,cndtr????????(???????)
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA2, ENABLE);
DMA_DeInit(DMA2_Channel4);
DMA_StructInit(&DMA_InitStructure);
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_BufferSize = cndtr;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular;
DMA_InitStructure.DMA_PeripheralBaseAddr = cpar;
DMA_InitStructure.DMA_MemoryBaseAddr = cmar;
DMA_Init(DMA2_Channel4, &DMA_InitStructure);
DMA_Cmd(DMA2_Channel4, ENABLE);
}
TIM4配置
void TIM4_Config(u16 arr,u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Period = arr - 1;
TIM_TimeBaseStructure.TIM_Prescaler = psc;
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_SelectOutputTrigger(TIM4,TIM_TRGOSource_Update);
TIM_Cmd(TIM4, ENABLE);
}main
int main(void)
{
u16 i;
u16 n = NPT;
int *p;
int *f;
double m;
double v_x = 0,i_x;
int h = 0;
Init();
while(1)
{
delay_s(1);
for(i = 0; i < Votage_BUFFER_Size; i++)
{
XR[i]=ADC_arr[i];
}
qsort(ADC_arr, Votage_BUFFER_Size, sizeof(ADC_arr[0]), compDec);
LCD_ShowxNum(132,300, (u32)(ADC_arr[1900] - ADC_arr[120]) * 1000 / ADC_arr[120],5,16,0X80);
printf("\n\r\n\r");
fft();
for(i = 0; i < Votage_BUFFER_Size ; i++)
{
XI[i] = XR[i];
}
GET_code(XI, XR);
draw(XR, 512, 10);
DMA_DeInit(DMA1_Channel1);
adc_init();
IWDG_Feed();
}
}
void Init(void) {
int i = 0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
uart_init(115200); //´®¿Ú³õʼ»¯Îª9600
LED_Init(); //³õʼ»¯ÓëLEDÁ¬½ÓµÄÓ²¼þ½Ó¿Ú
LCD_Init();
adc_init();
IWDG_Init(4,3125);
i = 1000000 / Fs;
tim1_pwm_config(72, (u16) i,1);
for(i = 0; i < 72; i++) {
SIN[i] = SIN[i] * 5 ;
}
Dac2_Init();
MYDMA_Config( (u32) & (DAC->DHR12R2), (u32)SIN, 72);
//TIM4_Config(100000 / tim4, 0);
}
完整工程如有需要,请到微信小程序“非遗种草社”中留言