STM32 USART—串口通信
目录
一、串口通信协议物理层电平标准:
1.RS232标准:
2.USB转串口通讯(常用)
3.原生的串口到串口
二、串口通信协议软件层:
三、串口功能框图
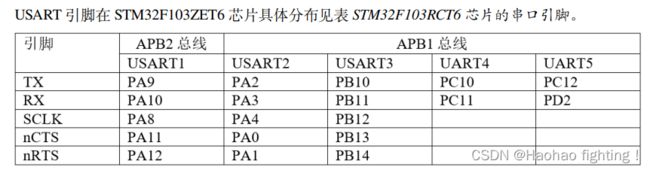
1.引脚
2.数据寄存器USART_DR
3.字符帧组成介绍
4.发送与接收数据
5.串口的通信速率
四、代码讲解
1.USART初始化结构体:
2.同步时钟初始化结构体:
3.编程时常用到的固件库函数:
五、程序实验
一、串口通信协议物理层电平标准:
1.RS232标准:
RS-232 标准主要规定了信号的用途、通讯接口以及信号的电平标准。
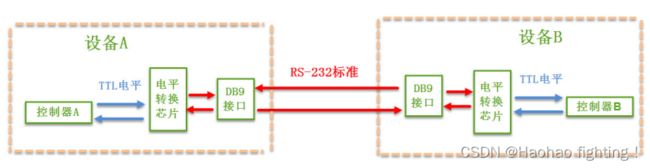
设备A、B两者的电平不同,要把两者的TTL电平都转换为RS-232标准的电平。
1、RS232标准串口主要用于工业设备直接通信
2、电平转换芯片一般有MAX3232, SP3232
2.USB转串口通讯(常用)
结构图:
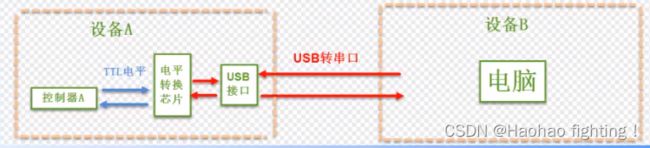
1、USB转串口主要用于设备跟电脑通信
2、电平转换芯片一般有CH340、PL2303,CP2102,FT232
3、使用的时候电脑端需要安装电平转换芯片的驱动
3.原生的串口到串口

1、原生的串口通信主要是控制器跟串口的设备或者传感器通信,不需要经过电平转换芯片来转换电平,直接就用TTL电平通信。
2、GPS模块、GSM模块、串口转WIFI模块、HC04蓝牙模块。
二、串口通信协议软件层:

起始位:由1个逻辑0的数据位表示。
结束位:由0.5、1、1.5或2个逻辑1的数据位表示。
有效数据:在起始位后紧接着的就是有效数据,有效数据的长度常被约定为5、6、7或8位长。
校验位:可选,为的是数据的抗干扰性。
校验方法分为:奇校验(odd)、偶校验(even)、0校验(space)、1校验(mark)、无校验(noparity)。
奇校验要求有效数据和校验位中“1”的个数为奇数,比如一个8位长的有效数据为:01101001,此时总共有4个“1”,为达到奇校验效果,校验位为“1”,最后传输的数据将是8位的有效数据加上1位的校验位总共9位。偶校验与奇校验要求刚好相反,要求帧数据和校验位中“1”的个数为偶数,比如数据帧:11001010,此时数据帧“1”的个数为4个,所以偶校验位为“0”。0校验是不管有效数据中的内容是什么,校验位总为“0”,1校验是校验位总为“1”。
通常配置无校验位,数据位8,停止位1.
三、串口功能框图
1:引脚 2:数据寄存器 3:控制器 4:波特率

1.引脚
功能引脚 TX:发送数据输出引脚。 RX:接收数据输入引脚。
nRTS:请求以发送 (Request To Send),n 表示低电平有效。如果使能 RTS 流控制,当 USART 接 收器准备好接收新数据时就会将 nRTS 变成低电平;当接收寄存器已满时,nRTS 将被设置为高 电平。该引脚只适用于硬件流控制。
nCTS:清除以发送 (Clear To Send),n 表示低电平有效。如果使能 CTS 流控制,发送器在发送下 一帧数据之前会检测 nCTS 引脚,如果为低电平,表示可以发送数据,如果为高电平则在发送完 当前数据帧之后停止发送。该引脚只适用于硬件流控制。
SCLK:发送器时钟输出引脚。这个引脚仅适用于同步模式。
后面3个都不常用
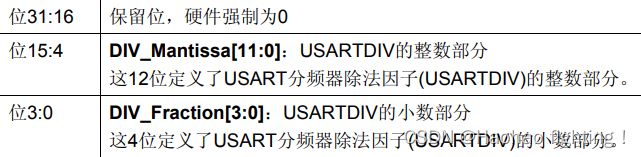
2.数据寄存器USART_DR
9-31位:保留为0,0-8位:包含了发送或接收的数据。由于它是由两个寄存器组成的,一个给发送用(TDR),一个给接收用(RDR),该寄存器兼具读和写的功能。
当使能校验位(USART_CR1中PCE位被置位)进行发送时,写到MSB(最高有效位)的值(根据数据的长度不同,MSB是第7位或者第8位)会被后来的校验位取代。当使能校验位进行接收时,读到的MSB位是接收到的校验位。
3.字符帧组成介绍

一个字符帧发送需要三个部分:起始位+数据帧+停止位。起始位是一个位周期的低电平,位周期就是每一位占用的时间;数据帧就是我们要发送的8位或9位数据,数据是从最低位开始传输的;停止位是一定时间周期的高电平。
第9位数据是否有效要取决于USART控制寄存器1(USART_CR1) 的M位设置,当M位为0时表示8位数据字长,当M位为1表示9位数据字长,我们一般使用8位数据字长。
停止位时间长短是可以通过USART控制寄存器2(USART_CR2)的 STOP[1:0]位控制,可选0.5个、1个、1.5个和2个停止位。默认使用 1个停止位。2个停止位适用于正常USART模式、单线模式和调制解调器模式。0.5个和1.5个停止位用于智能卡模式。
将USART_CR1寄存器的PCE位置1就可以启动奇偶校验控制,PS位进行校验选择。接收数据时如果出现奇偶校验位验证失败,会见 USART_SR寄存器的PE位置1,并可以产生奇偶校验中断。
4.发送与接收数据
发送:将USART_CR1寄存器的UE、TE、RE位都要置1(3个使能)。
USART_SR : TXE位置1,表示要发送的数据已经全部从发送数据寄存器(TDR)转移到了发送移位寄存器。
USART_CR1 : USART_SR的TXE位置1后,CR1的TXEIE位置1,产生USART中断。
USART_SR : TC位置1,表示数据已经通过TX引脚成功发送。
USART_CR1: 当USART_SR中的TC为’1’时,CR1的TCIE位置1,产生USART中断。
接受:USART_SR RXNE位置1,数据已接受完成
USART CR1:RXNEIE
5.串口的通信速率
串口通信里面,波特率是等于比特率的。USART_BRR:波特率寄存器
Tx / Rx 波特率 = Fck/16* ( USARTDIV )
这里的Fck是给外设的时钟(PCLK1用于USART2、3、4、5 36M,PCLK2用于USART1 72M)
USARTDIV是一个无符号的定点数。这12位的值设置在USART_BRR寄存器。
四、代码讲解
1.USART初始化结构体:

波特率:115200/9600
字长:0(8位)
模式选择:接收还是发送
2.同步时钟初始化结构体:
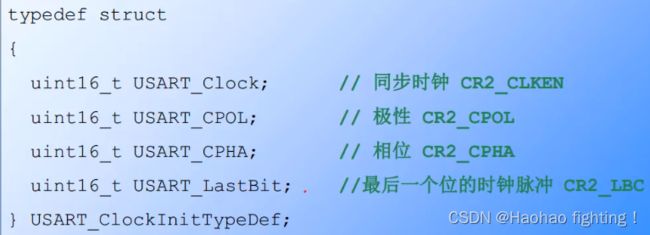
同步模式,我们经常用不到。
3.编程时常用到的固件库函数:
1-串口初始化函数
Void USART_Init (USART_TypeDef* USARTx, USART_InitTypeDef* USART_InitStruct)
2-中断配置函数
Void USART_ITConfig(USART_TypeDef* USARTx, uint16_t USART_IT,FunctionalState NewState)
3-串口使能函数
void USART_Cmd(USART_TypeDef* USARTx, FunctionalState NewState)
4-数据发送函数
void USART_SendData (USART_TypeDef*USARTx,uint16_t Data)
5-数据接收函数
uint16_t USART_ReceiveData(USART_TypeDef*USARTx)
6-中断状态位获取函数
ITStatus USART GetITStatus (USART_TypeDef*USARTx,uint16_t USART_IT)
五、程序实验
【1】单片机给电脑发送数据,电脑上位机把数据打印出来;电脑上位机给单片机发数据,单片机接收到数据之后立马发回给电脑,并打印出来(注意这是两个要求)。
编程要点:
单片机接收数据选择中断接收
1-初始化串口需要用到的GPIO(跟之前讲的一样)
2-初始化串口,配置串口的初始化结构体USART_InitTypeDef
3-中断配置(接收中断,中断优先级)
接收数据我们采用中断的形式,首先配置串口中断优先级,注意这个函数也要复制到该c文件下;然后使能串口接收中断;
//串口中断优先级配置
NVIC_Configuration();
//使能串口接收中断
USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE); 最后别忘了写中断服务函数:接收数据
// 串口中断服务函数
void DEBUG_USART_IRQHandler(void)
{
uint8_t ucTemp;
if(USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET)
{
ucTemp = USART_ReceiveData(DEBUG_USARTx);
USART_SendData(DEBUG_USARTx,ucTemp);
}
}这样就可以向单片机发送数据并返回到接收区。但是,如果我们发送的数据较多(比如发送“好好学习天天向上”,8个字符就要产生8次中断,这对于单片机CPU负荷很大,所以我们可以先把发送的数据放在一个缓冲区,等电脑端不发送了,全部缓存好了一起给单片机发送过去。这就是“队列机制”,这个应用十分广泛)。
4-使能串口 USART_Cmd()函数
5-编写发送和接收函数(应用官网写好的发送字符、字符串函数,除此之外,还可以用printf函数来发送数据)
对 printf函数发送数据的解释(较为重要):
我们不能直接调用printf函数来对串口进行发送数据,printf 函数里面会调用 fputc 这个函数(这个函数是真正发送数据的函数);而通过串口把数据发送到电脑的上位机是用 USART_SendData这个函数,所以需要在fputc这个函数里面调用USART_SendData这个函数。因此,我们都写了两个函数放在 bsp_uart.c 文件下:重定向c库函数printf到串口,重定向后可使用printf函数(发送数据);重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数(接收数据)
///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)//发送数据
{
/* 发送一个字节数据到串口 */
USART_SendData(DEBUG_USARTx, (uint8_t) ch);
/* 等待发送完毕 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET);
return (ch);
}
///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)//接收数据
{
/* 等待串口输入数据 */
while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);
return (int)USART_ReceiveData(DEBUG_USARTx);
}
6-编写中断服务函数
拓展:如果换成串口2的话,软件部分只更改.h文件里的宏定义即可;硬件注意接线连接正确。
【2】电脑给单片机发命令,用于控制开发板上的灯。
int main(void)
{
/*在程序来到main函数这里的时候,系统时钟已经配置成72M*/
uint8_t temp;
DEBUG_UART_Config();
LED_GPIO_Config();//初始化相关的GPIO
//USART_SendData(DEBUG_USARTx,'a');
//Usart_SendString(DEBUG_USARTx,"你好");
printf("你好\n");
/*对 printf函数发送数据的解释
我们不能直接调用printf函数来对串口进行发送数据,
printf 函数里面会调用 fputc 这个函数(这个函数是真正发送数据的函数),
而通过串口把数据发送到电脑的上位机是用 USART_SendData这个函数,
所以需要在 fputc 这个函数里面调用 USART_SendData 这个函数。
因此,我们都写了两个函数放在 bsp_uart.c 文件下:
重定向c库函数printf到串口,重定向后可使用printf函数(发送数据)
重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数(接收数据)
*/
while(1)
{
temp = getchar();//gatchar()函数只能接收一个字符
/* getchar 会调用int fgetc(FILE *f)函数,那个函数里面在一直循环判断时候接收完毕
这与中断产生冲突,所以我们取消用中断来接收数据,在while循环里面接收数据
*/
printf("接收到的字符为:%c",temp);
switch(temp)
{
case '1': LED1_ON;LED2_OFF; break;
case '2': LED2_ON;LED1_OFF; break;
default : LED1_OFF;LED2_OFF;break;
}
}
}getchar 会调用int fgetc(FILE *f)函数,那个函数里面在一直循环判断时候接收完毕,这与中断产生冲突,所以我们取消用中断来接收数据,在while循环里面接收数据。用switch语句来判断接收到的数据,来执行对灯的指令。