OpenCV-Python中cv2.fitEllipse的(a,b)和angle究竟表示什么?
目录
前言
一,a,b的理解
二,angle的理解
2.1 angle思路一
2.2 angle思路二
三,有趣的cv2.ellipse
四,结论
五,代码
前言
首先来看一段代码
ellipse = cv2.fitEllipse(cnt)
#(x, y), (a, b), angle = cv2.fitEllipse(cnt)
#ellipse = [ (x, y) , (a, b), angle ]
这是网上大部分给出的解释:
ellipse = cv2.fitEllipse(cnt)
其中 cnt 代表了一组轮廓点,一般常采用cv2.findContours()函数所返回的轮廓点(也就是一组点集)
返回值:ellipse = [ (x, y) , (a, b), angle ]
(x, y)代表椭圆中心点的位置
(a, b)代表长短轴长度,应注意a、b为长短轴的直径,而非半径
angle 代表了中心旋转的角度
但是,a究竟表示的是短轴,还是长轴,b究竟表示的是短轴还是长轴,angle表示的旋转角度是怎么计算的,解释的并不是很清楚。
最近,我在求cv2.fitEllipse拟合的椭圆边与椭圆长轴和短轴的交点的时候,感觉这3个参数的理解比较的绕,所以我将我的思路记录下来,与大家分享一下。这只是我的理解,如有问题,请指正。
一,a,b的理解
首先看两组对比图
第一组对照
图一 短轴竖直,长轴水平的椭圆
图二 长轴竖直,短轴水平的椭圆第二组对照
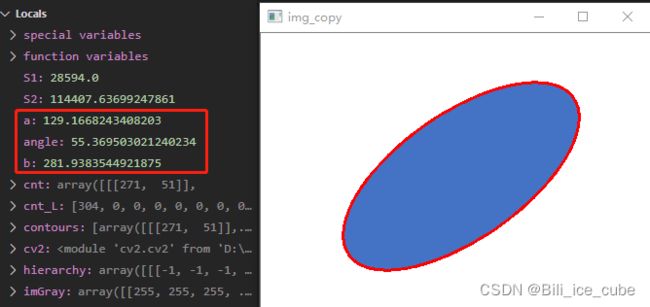
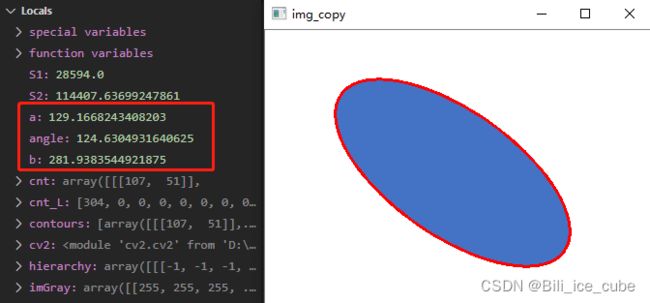
图三 长轴向右倾斜
图四 长轴向左倾斜通过两组对照,我们可以看出无论椭圆是怎么样放置的,获得的a均小于b,也就证明了a的值一定是短轴的直径,b的值一定是长轴的直径。


二,angle的理解
2.1 angle思路一
通过观察上述第一组对照组,我们可以初步判断,angle可能是短轴与水平轴的夹角。将这结论带入到第二对照组,找到短轴a,结合以前学习的函数知识,旋转的角度应该是按照逆时针方向为正,发现图三和图四均不符合图一图二的结论,反而感觉angle是表示长轴与水平轴的夹角。
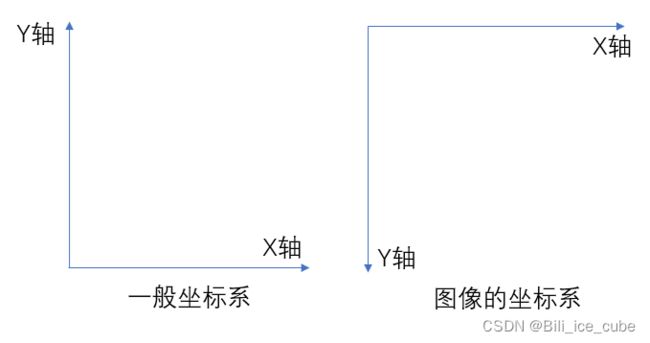
注意现在是在图像方面,它的坐标系和平时的坐标系不同。
所以我认为旋转角度应该是以顺时针旋转为正。angle表示短轴与水平轴的夹角。
2.2 angle思路二
但是有人就有疑问了,那我如果是先看第二组对照组的图片,理解思路就不一样了撒。而且第一组对照组的椭圆太特殊了,在实际的项目中很难遇到,所以就不会去关注了。如果只看图三和图四,我就有两种理解方式。
- angle是表示长轴与水平轴的夹角,逆时针为正。
- angle是表示短轴与水平轴的夹角,顺时针为正。
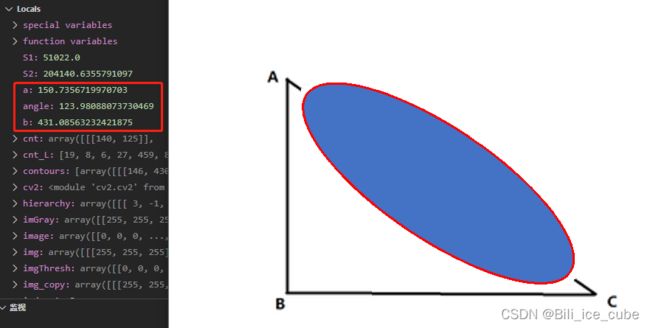
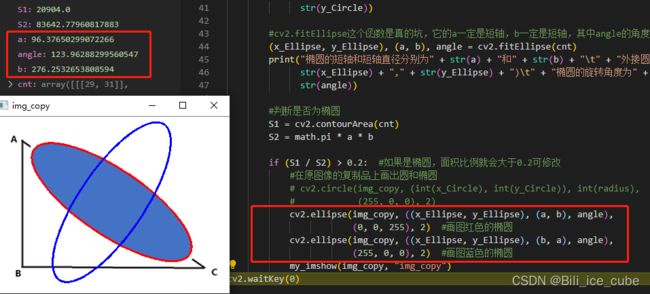
感觉两种理解都是对的,但是真相只有一个!请看下面的图片。
椭圆的背后是一个30度的直角三角形,角ACB是30度,如果按照上述的理解一来看,angle应该是150度左右。但是现在angle输出的是123左右。说明理解二是正确的。
补充:这里angle是输出的角度,不能直接三角函数(sin,cos,tan...),需要配和math.radians一起用。
import math angle = 30 print("angle为30度,sin30度的值为" + str(math.sin(math.radians(angle))))
三,有趣的cv2.ellipse
在总结这些内容时,我还发现了一个有趣的地方。大家可以先看看这篇博文:cv2.fitEllipse函数详解:ellipse参数并根据参数计算出椭圆焦点坐标_qq1406433326-CSDN博客_ellipse函数的参数cv2.fitEllipse函数详解:ellipse参数并根据参数计算出椭圆焦点坐标最近因为用到了这个函数,所以就趁着这个机会,好好顺顺,做下记录。ellipse = cv2.fitEllipse(cnt)#(x, y), (a, b), angle = cv2.fitEllipse(cnt)#ellipse = [ (x, y) , (a, b), angle ]ellipse 为元组类型,其里面的参数为:(x, y)代表椭圆中心点的位置(a, b)代表长短轴长度,应注意a、b为长短https://blog.csdn.net/qq_33950926/article/details/111409635 当作者在使用cv2.ellipse()这个函数时,得到的椭圆,不符合我上面的理解。经过代码的验证,我发现这位博主,在给函数中输入的a表示长轴,b表示短轴。而我前面下的结论里,我们使用的cv2.fitEllipse()默认获得的a表示短轴,b表示长轴,所以我认为angle和a,b的大小是有关系的。
四,结论
1. cv2.fitEllipse()函数输出的(a,b),其中a的值一定是短轴的直径,b的值一定是长轴的直径。
2. 不管是cv2.fitEllipse()函数还是cv2.ellipse()函数,在判断angle时:首先,看长短轴的第一个参数。
如果第一个参数(a)是长轴,那angle是表示长轴与水平轴的夹角,顺时针为正。
如果第一个参数(a)是短轴,那angle是表示短轴与水平轴的夹角,顺时针为正。3. angle是输出的角度,不能直接使用三角函数(math.sin,math.cos,math.tan...),需要配和math.radians一起用。
五,代码
import cv2
import numpy as np
from matplotlib import pyplot as plt
import math
def my_imshow(img, name): #显示图片
cv2.namedWindow(
name,
cv2.WINDOW_AUTOSIZE + cv2.WINDOW_KEEPRATIO + cv2.WINDOW_GUI_EXPANDED)
cv2.imshow(name, img)
return
img = cv2.imread("004_TOUSHI\\test (5).jpg", 3) #读入图片
# my_imshow(img, "img")
imGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) #灰度图
# my_imshow(imGray, "imGray")
ret, imgThresh = cv2.threshold(imGray, 127, 255, cv2.THRESH_BINARY_INV) #二值化处理
# my_imshow(imgThresh, "imgThresh")
image, contours, hierarchy = cv2.findContours(
imgThresh, cv2.RETR_TREE,
cv2.CHAIN_APPROX_SIMPLE) #contours为轮廓集,可以计算轮廓的长度、面积等
# my_imshow(image ,"image")
#找出最大的轮廓
index_1 = 0
cnt_L = [0] * 100
for cnt in contours:
cnt_L[index_1] = len(cnt)
index_1 = index_1 + 1
max_cnt = np.argsort(cnt_L)[99]
#拟合椭圆
img_copy = img.copy()
for cnt in contours:
if cnt_L[max_cnt] == len(cnt):
# 最小外接圆
(x_Circle, y_Circle), radius = cv2.minEnclosingCircle(cnt)
print("外接圆的半径" + str(radius) + "\t" + "外接圆的中心点" + str(x_Circle) + "," +
str(y_Circle))
#cv2.fitEllipse这个函数是真的坑
(x_Ellipse, y_Ellipse), (a, b), angle = cv2.fitEllipse(cnt)
print("椭圆的短轴和短轴直径分别为" + str(a) + "和" + str(b) + "\t" + "外接圆的中心点为(" +
str(x_Ellipse) + "," + str(y_Ellipse) + ")\t" + "椭圆的旋转角度为" +
str(angle))
#判断是否为椭圆
S1 = cv2.contourArea(cnt)
S2 = math.pi * a * b
if (S1 / S2) > 0.2: #如果是椭圆,面积比例就会大于0.2可修改
cv2.ellipse(img_copy, ((x_Ellipse, y_Ellipse), (a, b), angle),
(0, 0, 255), 2) #画图红色的椭圆
cv2.ellipse(img_copy, ((x_Ellipse, y_Ellipse), (b, a), angle),
(255, 0, 0), 2) #画图蓝色的椭圆
my_imshow(img_copy, "img_copy")
cv2.waitKey(0) 本文只是我初步的理解,真正的涵义只有看了源码才知道。我还没找到源码,如果有大佬知道真正的涵义,欢迎在评论区分享。
如果本文对你有帮助,麻烦留下一个免费的赞!!!(~ ̄▽ ̄)~