CycleGAN学习笔记
CycleGAN学习笔记
文章目录
- CycleGAN学习笔记
- 一、CycleGAN的应用
- 二、CycleGAN和pix2pix的不同:
- 三、GAN——Generative Adversarial Networks
-
- 2.1. 传统的GAN是 A→B 单向的:
- 3.2 GAN损失
- 四.CycleGAN
-
- 4.1整体网络结构
- 4.2 CycleGAN损失
- 五.PatchGAN
-
- 5.1 与普通GAN判别器的区别:
- 5.2 优点:
- 5.3 适用场景:
- 5.4 网络结构:
- 5.5 感受域
- 5.6PatchGAN的实现
一、CycleGAN的应用
风格迁移、物体转换、季节转换等。

作用:让两个 domain 的图片互相转化
二、CycleGAN和pix2pix的不同:

unpaired,即不用配对就可以训练。
三、GAN——Generative Adversarial Networks
2.1. 传统的GAN是 A→B 单向的:
目的: 把 domain A 的图片转化为 domain B 的图片。
 网络中有生成器G(generator)和鉴别器(Discriminator)。
网络中有生成器G(generator)和鉴别器(Discriminator)。
缺点:单纯的使用判别损失是无法进行训练的。原因在于,映射F完全可以将所有x都映射到y空间的同一张图片,使损失无效化。为此提出循环GAN网络。从域x生成域y,再从y生成回x,循环往复。例如:斑马到马。生成的马和斑马形状不同,但是马,也能骗过鉴别器。

3.2 GAN损失
训练这个单向GAN需要两个loss:生成器的重建Loss和判别器的判别Loss。
(1)重建Loss:
希望生成的图片与原图a尽可能的相似。采取 L1 loss 或者 L2 loss。

(2)判别Loss:
生成的假图片和原始真图片都会输入到判别器中。公式为0,1二分类的损失。
![]() 一 对于判别损失的理解:介绍一下价值函数:
一 对于判别损失的理解:介绍一下价值函数:
 解释:x服从数学公式: p_data(x)}分布,x是从真是数据中采样的。数学公式: p_(z)}可以是正态分布,也可以是均值分布。D(G(z))代表判别器对生成器合成数据的概率判断。E表示对所有x,z的平均。数学公式: max_{D} 指D的目标是最大化价值V,即最大化log。log在底数>1时为单调递增函数。
解释:x服从数学公式: p_data(x)}分布,x是从真是数据中采样的。数学公式: p_(z)}可以是正态分布,也可以是均值分布。D(G(z))代表判别器对生成器合成数据的概率判断。E表示对所有x,z的平均。数学公式: max_{D} 指D的目标是最大化价值V,即最大化log。log在底数>1时为单调递增函数。
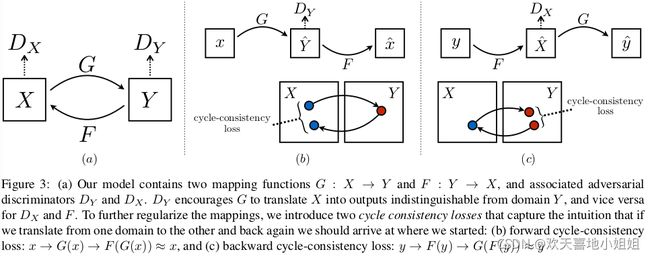
四.CycleGAN
CycleGAN本质上是两个镜像对称的GAN,构成了一个环形网络。
两个GAN共享两个生成器,并各自带一个判别器,即共有两个判别器和两个生成器。
即:两个生成器网络:G和F;两个鉴别器网络:Dx和Dy。整个网络是一个对偶结构。
4.1整体网络结构


4.2 CycleGAN损失
涉及4种损失函数:G网络、D网络、Cycle loss、Identity loss
X→Y 的判别器损失为:
 Y→X 的判别器损失为:
Y→X 的判别器损失为:
 循环一致性损失()为:
循环一致性损失()为:
通常称为L1loss
 其中,G的输入一般为x,是用来生成fake y图的生成器,F的输入一般为y,是用来生成fake x图的生成器。当我们把x送入到G中后,得到的是假的y图,再把这张假的y图送入到F中,得到更假的x图。理想情况下,此时的更假的x图应该与原始的x图相差无几。这样也便构成了一个循环,因此叫做循环一致性损失。
其中,G的输入一般为x,是用来生成fake y图的生成器,F的输入一般为y,是用来生成fake x图的生成器。当我们把x送入到G中后,得到的是假的y图,再把这张假的y图送入到F中,得到更假的x图。理想情况下,此时的更假的x图应该与原始的x图相差无几。这样也便构成了一个循环,因此叫做循环一致性损失。
在训练中经常会碰到这样一种情况,通过x得到的fake y,会越来越倾向于成为一个能骗得过判别器的值,生成器会慢慢发现,不管送进来的x是什么样,只要我生成的图越像y,就越能骗过判别器,因此只要生成跟y一样的图就好了,但这样的y是我们不想要的。即:生成器和判别器会一起欺骗网络。因此,设计了这个循环一致性损失。
网络的所有损失加起来为:

 Identity loss:(容易忽略)
Identity loss:(容易忽略)
![]() 生成器G用来生成y风格图像,那么把y送入G,应该仍然生成y,只有这样才能证明G具有生成y风格的能力。因此G(y)和y应该尽可能接近。根据论文中的解释,如果不加该loss,那么生成器可能会自主地修改图像的色调,使得整体的颜色产生变化。
生成器G用来生成y风格图像,那么把y送入G,应该仍然生成y,只有这样才能证明G具有生成y风格的能力。因此G(y)和y应该尽可能接近。根据论文中的解释,如果不加该loss,那么生成器可能会自主地修改图像的色调,使得整体的颜色产生变化。
五.PatchGAN
PatchGAN其实指的是GAN的判别器,类似与全卷积网络。
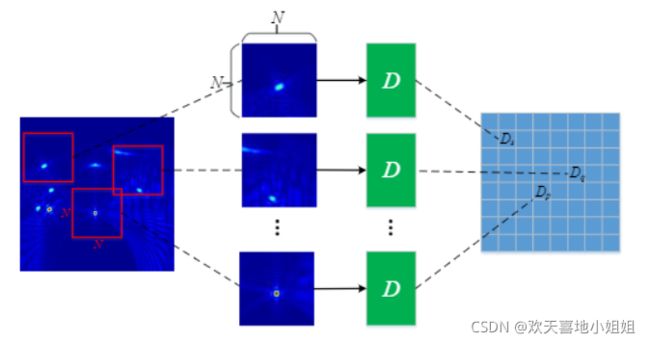
X, 数学公式: X_{ij}的值代表每个patch为真样本的概率,将 数学公式: X_{ij}求均值,即为判别器最终输出。
5.2 优点:
X 其实就是卷积层输出的特征图。从这个特征图可以追溯到原始图像中的某一个位置,可以看出这个位置对最终输出结果的影响。即:最终结果求平均,考虑到图像的不同部分的影响。
5.3 适用场景:
对于要求高分辨率、高清细节的图像领域中。
原因:引入了PatchGAN,它的感受域对于与输入中的一小块区域,也就是说, 数学公式: X_{ij} 对应了判别器对输入图像的一小块的判别输出,这样训练使模型更能关注图像细节。普通GAN判别器不适合。
5.4 网络结构:
##网络结构:
Conv2d(3, 64, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1)), LeakyReLU
Conv2d(64, 128, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1)), BN+LeakyReLU
Conv2d(128, 256, kernel_size=(4, 4), stride=(2, 2), padding=(1, 1)), BN+LeakyReLU
Conv2d(256, 512, kernel_size=(4, 4), stride=(1, 1), padding=(1, 1)), BN+LeakyReLU
Conv2d(512, 1, kernel_size=(4, 4), stride=(1, 1), padding=(1, 1))
##最后一层的输出通道数是512→1,该处的通道变化即形成了一个N*N*1的矩阵特征图。
代码的最后附上了PatchGAN的网络结构,大家可以自己尝试调试一下。注意到最后一层的输出通道数是512→1,该处的通道变化即形成了一个NN1的矩阵特征图。
另外在大神Phillip Isola的回答中(文末有链接)提到最后的特征图矩阵中的一个piexl对应原图的7070piexls,这也可以在代码中计算得到,即特征图的一个点的感受野对应原图7070区域。大家可以根据网络结构推理70*70感受野怎么来的,这里贴出Fomoro AI软件计算的感受野用以佐证。

5.5 感受域
对CycleGAN来说,判别器输出大小30x30x1,论文中却指出PatchGAN输入图像处理为70x70patches,就是根据判别器最终输出的特征图进行回溯,最终对应到输入图像70x70的区域.
为了便于理解,看下面的代码,其计算感受域大小
def f(output_size, ksize, stride):
return (output_size - 1) * stride + ksize
last_layer = f(output_size=1, ksize=4, stride=1)
# Receptive field: 4
fourth_layer = f(output_size=last_layer, ksize=4, stride=1)
# Receptive field: 7
third_layer = f(output_size=fourth_layer, ksize=4, stride=2)
# Receptive field: 16
second_layer = f(output_size=third_layer, ksize=4, stride=2)
# Receptive field: 34
first_layer = f(output_size=second_layer, ksize=4, stride=2)
# Receptive field: 70
print(f'最后一层感受域大小:{last_layer}')
print(f'第一层感受域大小:{first_layer}')
#最后一层感受域大小:4
#第一层感受域大小:70
f即为计算卷积感受域的公式,最后一层的感受域即为卷积核大小4,那么这个卷积核能够感受到原始输入图像多大的范围呢?是70,也就是CycleGAN所说的70x70patches.
综上,PatchGAN并不神秘,其只是一个全卷积网络而已,只是最终输出是一个特征图X,而非一个实数.它就相当于对图像先进行若干次70x70的随机剪裁,将剪裁后图像输入普通的判别器,然后对所有输出的实数值取平均.
5.6PatchGAN的实现
class NLayerDiscriminator(nn.Module):
"""Defines a PatchGAN discriminator"""
def __init__(self, input_nc, ndf=64, n_layers=3, norm_layer=nn.BatchNorm2d):
"""Construct a PatchGAN discriminator
Parameters:
input_nc (int) -- the number of channels in input images
ndf (int) -- the number of filters in the last conv layer
n_layers (int) -- the number of conv layers in the discriminator
norm_layer -- normalization layer
"""
super(NLayerDiscriminator, self).__init__()
if type(norm_layer) == functools.partial: # no need to use bias as BatchNorm2d has affine parameters
use_bias = norm_layer.func == nn.InstanceNorm2d
else:
use_bias = norm_layer == nn.InstanceNorm2d
kw = 4
padw = 1
sequence = [nn.Conv2d(input_nc, ndf, kernel_size=kw, stride=2, padding=padw), nn.LeakyReLU(0.2, True)]
nf_mult = 1
nf_mult_prev = 1
for n in range(1, n_layers): # gradually increase the number of filters
nf_mult_prev = nf_mult
nf_mult = min(2 ** n, 8)
sequence += [
nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult, kernel_size=kw, stride=2, padding=padw, bias=use_bias),
norm_layer(ndf * nf_mult),
nn.LeakyReLU(0.2, True)
]
nf_mult_prev = nf_mult
nf_mult = min(2 ** n_layers, 8)
sequence += [
nn.Conv2d(ndf * nf_mult_prev, ndf * nf_mult, kernel_size=kw, stride=1, padding=padw, bias=use_bias),
norm_layer(ndf * nf_mult),
nn.LeakyReLU(0.2, True)
]
sequence += [nn.Conv2d(ndf * nf_mult, 1, kernel_size=kw, stride=1, padding=padw)] # output 1 channel prediction map
self.model = nn.Sequential(*sequence)
def forward(self, input):
"""Standard forward."""
return self.model(input)
参考资料:1.https://zhuanlan.zhihu.com/p/359287990
2. https://blog.csdn.net/weixin_35576881/article/details/88058040
3. https://link.zhihu.com/?target=https%3A//github.com/junyanz/pytorch-CycleGAN-and-pix2pix/issues/39