c++版模板匹配与特征金字塔结构
先来了解一些基础性的知识,如何读取原始图片和小图,对其进行处理。这里肯定是要用到opencv的,opencv的安装和使用教程之前也有写到,这里重新梳理以下:
目录:
一、环境安装
二、基础知识
三、模板匹配+特征金字塔完整demo
一、环境安装
首先在网上搜索c++官网安装社区版Visual Studio

安装完成之后点击c++桌面开发进行下一步

然后在opencv官网下载opencv
https://opencv.org/releases/

选择合适版本下载即可。

然后在系统环境变量中加入opencv的路径,D:\opencv\build\x64\vc15\bin

然后我们可以打开VS软件进行项目创建


Debug x64

然后在项目属性中配置opencv路径

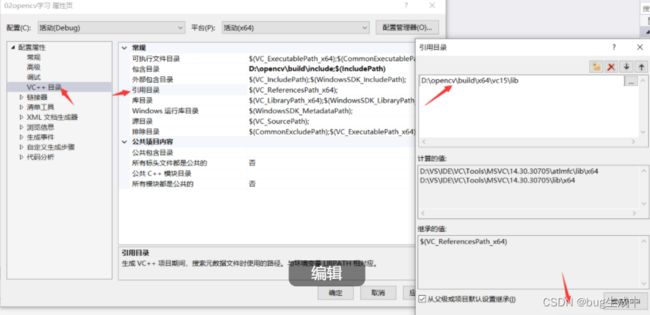
在其中找到VC++ 目录 点击包含目录 编辑添加路径 D:\opencv\build\include
 然后在VC++ 目录 点击引用目录 编辑添加路径 D:\opencv\build\x64\vc15\lib
然后在VC++ 目录 点击引用目录 编辑添加路径 D:\opencv\build\x64\vc15\lib
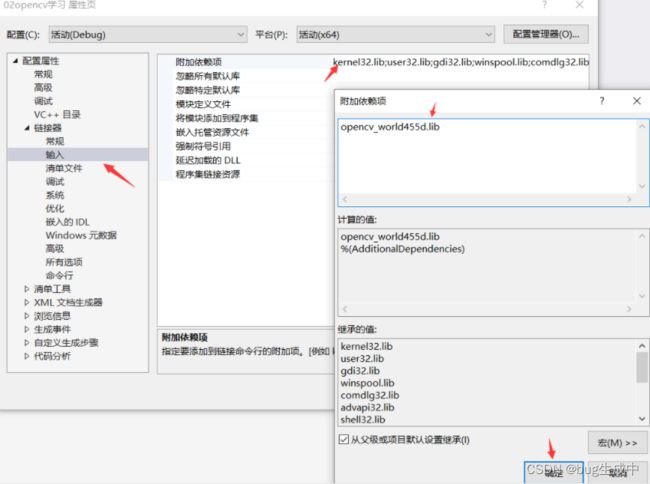
然后在链接器中,附加依赖项中编辑加入名称,opencv_world455d.lib(根据自己下载的opencv版本调整)一般是vs15文件夹下的opencv_world455d.dll后缀名dll变为lib
完成c++的opencv环境配置
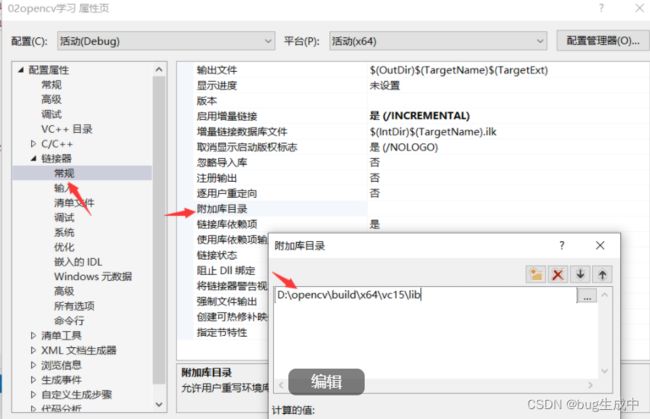
如果运行出现报错的话,比如提示以下错误
严重性 代码 说明 项目 文件 行 禁止显示状态
错误 LNK1104 无法打开文件“opencv_world455d.lib” 02opencv学习 D:\csdn\c++\02opencv学习\02opencv学习\LINK 1
我们可以在链接器,常规中添加附加库目录,路径D:\opencv\build\x64\vc15\lib
然后用个测试代码进行测试看能否运行,在解决方案资源管理器中,点击源文件,添加新建项,


输入以下demo进行测试:
#include
#include
#include
#include
using namespace cv;
using namespace std;
int main() {
string path = "Resources/test.png";
Mat img = imread(path);
imshow("Image", img);
waitKey(0);
return 0;
} 以上测试没有问题之后,我们就可以进行c++版本的模板匹配测试了。
二、基础知识
先是基础的图像读取,我们可以尝试输出图像的尺寸。
直接上demo
// 当使用预编译的头时,需要使用此源文件,编译才能成功。
#include
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
Mat src = imread("./original.jpg", 0); //读取待检测的图像并灰度化
Mat temp = imread("./template.jpg", 0); //读取匹配小图并灰度化
int temp_width = temp.cols; //获取图像的宽
int temp_height = temp.rows; //获取图像的高
int src_width = src.cols; //获取图像的宽
int src_height = src.rows; //获取图像的高
cout << "src_width:" << src_width << endl;
cout << "src_height:" << src_height << endl;
cout << "temp_width:" << temp_width << endl;
cout << "temp_height:" << temp_height << endl;
}
显示的结果如下:

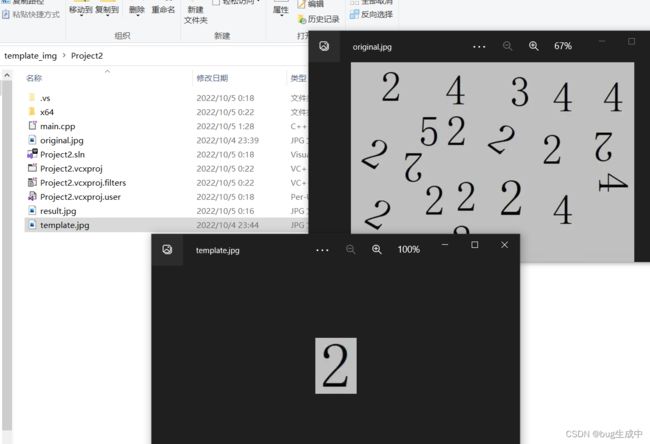
可以看到读取的是本地的original.jpg图片表示待匹配的原始图片,template.jpg图片表示模板图片。他们的尺寸分别是805*567和79*107。这两张图片如下:
然后就是本文最重要的知识点,也就是模板匹配。
我们可以定义一个模板匹配函数,传入参数为原图、匹配小图、金字塔层数、匹配阈值,
返回检测到的pos点pt。
pt = pyramidMatch(src, temp, thresh); //进行模板匹配,传入参数 原图、匹配小图、金字塔层数、匹配阈值,返回检测到的pos点
主函数我们可以写成这个样子
int main()
{
Mat src = imread("./original.jpg", 0); //读取待检测的图像并灰度化
Mat temp = imread("./template.jpg", 0); //读取匹配小图并灰度化
int temp_width = temp.cols; //获取图像的宽
int temp_height = temp.rows; //获取图像的高
int src_width = src.cols; //获取图像的宽
int src_height = src.rows; //获取图像的高
cout << "src_width:" << src_width << endl;
cout << "src_height:" << src_height << endl;
cout << "temp_width:" << temp_width << endl;
cout << "temp_height:" << temp_height << endl;
double thresh = 0.9;//bear:thresh 0.9,nLevels 2; 设置匹配阈值
vector pt; //集合
pt = pyramidMatch(src, temp, thresh); //进行模板匹配,传入参数 原图、匹配小图、金字塔层数、匹配阈值,返回检测到的pos点
cout << "检测到的点为" << pt << endl;
} 接下来是对pyramidMatch函数的定义,我们先从简单的单模板匹配做起,
c++的模板匹配少不了封装好的函数matchTemplate
函数的原型如下:
void matchTemplate( InputArray image, InputArray templ,OutputArray result, int method, InputArray mask = noArray());
参数解释:
参数1image待检测的原图,
参数2templ欲搜索的图像。
参数3result 比较结果的映射图像, 它应该是单通道、8-比特或32-比特 浮点数图像,匹配小图不能大于输入图像,如果原图(待搜索图像)尺寸为W x H, 而templ尺寸为 w x h, 则result尺寸一定是(W-w+1)x(H-h+1)。
参数4method: 指定的匹配方法, 有如下6种:
CV_TM_SQDIFF——平方差匹配法(最好匹配0)
CV_TM_SQDIFF_NORMED——归一化平方差匹配法(最好匹配0)
CV_TM_CCORR——相关匹配法(最坏匹配0)
CV_TM_CCORR_NORMED——归一化相关匹配法(最坏匹配0)
CV_TM_CCOEFF——系数匹配法(最好匹配1)
CV_TM_CCOEFF_NORMED——化相关系数匹配法(最好匹配1) CV_TM_CCOEFF_NORMED :化相关系数匹配法,最好匹配为1;
这里我们直接使用第6种匹配方法CV_TM_CCOEFF_NORMED。
写好的代码如下:
// 当使用预编译的头时,需要使用此源文件,编译才能成功。
#include
#include
#include
#include
using namespace cv;
using namespace std;
Mat CalculateNcc(Mat src, Mat temp)
{
Mat result;
int result_w = src.cols - temp.cols + 1; //结果图像的尺寸
int result_h = src.rows - temp.rows + 1;
result.create(result_h, result_w, CV_32FC1); //结果图像是单通道32位浮点型
matchTemplate(src, temp, result, TM_CCOEFF_NORMED); //模板匹配,参数1待检测的原图, 欲搜索的图像。它应该是单通道、8-比特或32-比特 浮点数图像,temp是匹配小图不能大于输入图像,参数3比较结果的映射图像 CV_TM_CCOEFF_NORMED :化相关系数匹配法,最好匹配为1;
imshow("result", result);
normalize(result, result, 0, 1, NORM_MINMAX, -1);//归一化0到1
return result;
}
vector pyramidMatch(Mat src, Mat temp, double thresh)//模板匹配的主要函数,传入参数 原图、匹配小图、金字塔层数、匹配阈值,返回检测到的pos点
{
Mat imgNcc = CalculateNcc(src, temp);//top-result 使用缩放后的图像作为参数传入,一个原图,一个模板图片,计算Ncc
double minValue, maxValue;
Point minLoc, maxLoc;
minMaxLoc(imgNcc, &minValue, &maxValue, &minLoc, &maxLoc);//获得矩阵中的最大值和最小值及其位置
cout << "minValue:" << minValue << endl;
cout << "maxValue:" << maxValue << endl;
rectangle(src, maxLoc, Point(maxLoc.x + temp.cols, maxLoc.y + temp.rows), Scalar(0, 255, 0), 2, 8);
imshow("src", src);
waitKey(0);
vector pt;//存储结果
pt.push_back(maxLoc);
return pt;
}
int main()
{
Mat src = imread("./original.jpg", 0); //读取待检测的图像并灰度化
Mat temp = imread("./template.jpg", 0); //读取匹配小图并灰度化
int temp_width = temp.cols; //获取图像的宽
int temp_height = temp.rows; //获取图像的高
int src_width = src.cols; //获取图像的宽
int src_height = src.rows; //获取图像的高
cout << "src_width:" << src_width << endl;
cout << "src_height:" << src_height << endl;
cout << "temp_width:" << temp_width << endl;
cout << "temp_height:" << temp_height << endl;
double thresh = 0.9;//bear:thresh 0.9,nLevels 2; 设置匹配阈值
vector pt; //集合
pt = pyramidMatch(src, temp, thresh); //进行模板匹配,传入参数 原图、匹配小图、金字塔层数、匹配阈值,返回检测到的pos点
//cout << "检测到的点为" << pt << endl;
} 这里我们打印了以下可视化图片

从中你能发现什么规律吗,是左边映射的白色是最大值么。
接下来就是对其进行多模板的匹配方式。多模板匹配的方法就需要我们把result的映射结果挨个像素遍历,将符合阈值要求的保留。
代码如下:
// 当使用预编译的头时,需要使用此源文件,编译才能成功。
#include
#include
#include
#include
using namespace cv;
using namespace std;
Mat CalculateNcc(Mat src, Mat temp)
{
Mat result;
int result_w = src.cols - temp.cols + 1; //结果图像的尺寸
int result_h = src.rows - temp.rows + 1;
result.create(result_h, result_w, CV_32FC1); //结果图像是单通道32位浮点型
matchTemplate(src, temp, result, TM_CCOEFF_NORMED); //模板匹配,参数1待检测的原图, 欲搜索的图像。它应该是单通道、8-比特或32-比特 浮点数图像,temp是匹配小图不能大于输入图像,参数3比较结果的映射图像 CV_TM_CCOEFF_NORMED :化相关系数匹配法,最好匹配为1;
normalize(result, result, 0, 1, NORM_MINMAX, -1);//归一化0到1
return result;
}
vector pyramidMatch(Mat src, Mat temp, double thresh)//模板匹配的主要函数,传入参数 原图、匹配小图、金字塔层数、匹配阈值,返回检测到的pos点
{
Mat imgNcc = CalculateNcc(src, temp);//top-result 使用缩放后的图像作为参数传入,一个原图,一个模板图片,计算Ncc
double matchValue;
int count0 = 0;
int tempW = 0, tempH = 0;
char matchRate[10];
vector pt;//存储结果
//将resultImage中的像素进行逐个判断
for (int i = 0; i < imgNcc.rows; i++)
{
for (int j = 0; j < imgNcc.cols; j++)
{
//获取匹配系数
matchValue = imgNcc.at(i, j);
//往matchRate中输入此像素的matchValue
sprintf(matchRate, "%0.2f", matchValue);
//设置满足条件
if (matchValue >= thresh && (abs(j - tempW) > 5) && (abs(i - tempH) > 5))
{
count0++;
putText(src, matchRate, Point(j - 5, i - 5), FONT_HERSHEY_COMPLEX, 1, Scalar(0, 0, 255), 1);
rectangle(src, Point(j, i), Point(j + temp.cols, i + temp.rows), Scalar(0, 255, 0), 2);
pt.push_back(Point(j, i));
tempW = j;
tempH = i;
}
}
}
cout << "count=" << count0 << endl;
imshow("resultImg", imgNcc);
imshow("dst", src);
waitKey(0);
return pt;
}
int main()
{
Mat src = imread("./original.jpg", 0); //读取待检测的图像并灰度化
Mat temp = imread("./template.jpg", 0); //读取匹配小图并灰度化
int temp_width = temp.cols; //获取图像的宽
int temp_height = temp.rows; //获取图像的高
int src_width = src.cols; //获取图像的宽
int src_height = src.rows; //获取图像的高
cout << "src_width:" << src_width << endl;
cout << "src_height:" << src_height << endl;
cout << "temp_width:" << temp_width << endl;
cout << "temp_height:" << temp_height << endl;
double thresh = 0.9;//bear:thresh 0.9,nLevels 2; 设置匹配阈值
vector pt; //集合
pt = pyramidMatch(src, temp, thresh); //进行模板匹配,传入参数 原图、匹配小图、金字塔层数、匹配阈值,返回检测到的pos点
cout << "检测到的点为" << pt << endl;
}
最后的检测结果如下:

以上就是c++版本的多模板匹配的方法,干货满满,点赞收藏,下一期结合金字塔结构进行模板匹配。