深度学习P2周----彩色图片识别
深度学习P2周----彩色图片识别
- ** 本文为[365天深度学习训练营]
- ** 参考文章地址: [深度学习100例-卷积神经网络(CNN)彩色图片分类 | 第2天]
- ** 作者:[K同学啊]
文章目录
- 深度学习P2周----彩色图片识别
- 前言
- 一、导入相关的包
- 二、数据集操作
-
- 1.加载数据集
- 2.查看数据集
- 三、构建CNN网络
-
- 1.torch.nn.Conv2d()
- 2.torch.nn.Maxpool2d()
- 3.torch.nn.Linear()
- 4.卷积池化层的计算过程
- 5.CNN网络
-
- a.网络shape变化过程
- b.nn创建CNN网络
- c.nn.Sequential创建CNN网络
- d.编写打印进度条函数
- 四、编写训练和测试函数
-
- 1.超参数设置和查看显存
- 2.train()
- 3.test()
- 五、训练循环函数
- 六、结果可视化
- 七、全部代码
- 八、总结
前言
深度学习P2周===>彩色图片识别
要求:
1.学习如何编写一个完整的深度学习程序
2.手动推导卷积层与池化层的计算过程
本次的重要在于学会构建一个简单的CNN网络
环境:python3.8, pycharm, torch
对于这次彩色图片识别的程序编写, 总结如下:
1.知道如何操作和加载内置数据集的过程,以及在迭代查看数据集图片能清楚原理,torch存储图片的形式。
2.了解卷积,池化,全连接的基本作用和原理,知道推导过程。
3.会构建简单的CNN网络,了解内部前向传播的过程。
4.了解训练,测试的原理和过程。
一、导入相关的包
import torch
from torch import nn
import numpy as np
import pandas as pd
import datetime
import matplotlib.pyplot as plt
import torch.nn.functional as F
from torch.utils.data import DataLoader
import torchvision
from torchvision.transforms import ToTensor
二、数据集操作
1.加载数据集
本次使用的torchvision内置的cifar10数据集,可直接通过torchvision类直接继承,并创建成Dataloader类。
代码如下(示例):
train_dataset = torchvision.datasets.CIFAR10(root='./cifar10',
transform=ToTensor(),
train=True,
download=True)
test_dataset = torchvision.datasets.CIFAR10(root='./cifar10',
transform=ToTensor(),
train=False,
download=True)
train_dataloader = DataLoader(train_dataset, batch_size=32, shuffle=True)
test_dataloader = DataLoader(test_dataset, batch_size=32, shuffle=False)
简要说明: root路径,transform是数据集变换形成为ToTensor(),要变成张量的形式才能送进网络进行训练,train是否作为训练集,download是否下载。batch_size=32,训练集默认为乱序,测试集一般不做乱序。
2.查看数据集
代码如下(示例):
img_bath, label_batch = next(iter(train_dataloader))
print(img_bath.shape) # torch.Size([32, 3, 32, 32])
classes = ['airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck'] # 数据集的类别标记名称
plt.figure(figsize=(12, 8)) # 设置画布的大小
for i, (img, label) in enumerate(zip(img_bath[:6], label_batch[:6])):
img = img.permute(1, 2, 0).numpy() # 维度交换转为numpy()形式
plt.subplot(1, 6, i+1) # 绘制1行6列的图片
plt.title(classes[label.item()]) # 标题图片标记的类别
plt.imshow(img, cmap=plt.cm.binary)
plt.show()
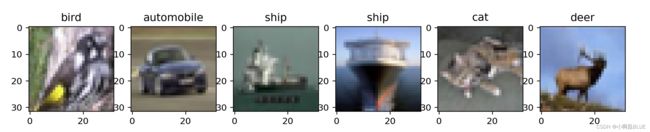
简要说明: torch图片的shape形式为 [batch_size,channels,height,weight],打印图片的shape为torch.Size([32, 3, 32, 32])
三、构建CNN网络
1.torch.nn.Conv2d()
torch.nn.Conv2d(in_channels,out_channels,kernel_size,stride=1,padding=0,dilation=1,groups=1,
bias=True,padding_mode='zeros',device=None,dtype=None)
in_channels:输入通道数
out_channels:输出通道数
kernel_size:卷积核大小
stride=1:卷积核步长,默认为1
padding=0:填充,默认为0
2.torch.nn.Maxpool2d()
nn.MaxPool2d(kernel_size,stride,padding=0,dilation=1,ceil_mode=False,return_indices=False)
kernel_size:卷积核大小
stride:卷积步长
3.torch.nn.Linear()
nn.Linear( in_features,out_features,bias=True,device=None,dtype=None)
in_features:输入特征大小 out_features:输出特征大小
4.卷积池化层的计算过程
输入图片:W * W
卷积核大小:F
步长:S
填充:P
输出图片:N * N
N = (W-F+2P)/S + 1
5.CNN网络
a.网络shape变化过程
3,32,32(输入数据)—>64,30,30(卷积1:F=3,S=1,P=0)—>64,15,15(池化1:F=2,S=2)—>64,13,13(卷积2:F=3,S=1,P=0)—>64,6,6(池化2:F=2,S=2)—>128,4,4(卷积3:F=3,S=1,P=0)—>128,2,2(池化3:F=2,S=2)—>512(展平)—>256(全连接1)—>10(全连接2)
b.nn创建CNN网络
class Cnn_net_1(nn.Module):
def __init__(self):
super(Cnn_net_1, self).__init__()
self.c1 = nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, stride=1)
self.s1 = nn.MaxPool2d(kernel_size=2, stride=2)
self.c2 = nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1)
self.s2 = nn.MaxPool2d(kernel_size=2, stride=2)
self.c3 = nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1)
self.s3 = nn.MaxPool2d(kernel_size=2, stride=2)
self.l1 = nn.Linear(512, 256)
self.l2 = nn.Linear(256, 10)
def forward(self, x):
x = F.relu(self.c1(x))
x = self.s1(x)
x = F.relu(self.c2(x))
x = self.s2(x)
x = F.relu(self.c3(x))
x = self.s3(x)
x = x.view(-1, 128*2*2)
x = F.relu(self.l1(x))
x = self.l2(x)
return x
c.nn.Sequential创建CNN网络
class Cnn_net_2(nn.Module):
def __init__(self):
super(Cnn_net_2, self).__init__()
self.c1 = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, stride=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.l1 = nn.Sequential(
nn.Linear(512, 256),
nn.ReLU(),
nn.Linear(256, 10)
)
def forward(self, x):
x = self.c1(x)
x = x.view(-1, 512)
x = self.l1(x)
return x
d.编写打印进度条函数
def printlog(info):
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("\n"+"=========="*8 + '%s'%nowtime)
print(str(info)+"\n")
四、编写训练和测试函数
1.超参数设置和查看显存
device = 'cuda' if torch.cuda.is_available() else 'cpu'
model = Cnn_net_2().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
loss_fn = nn.CrossEntropyLoss()
2.train()
def train(train_dataloader, model, loss_fn, optimizer):
size = len(train_dataloader.dataset)
num_of_batch = len(train_dataloader)
train_correct, train_loss = 0.0, 0.0
for x, y in train_dataloader:
x, y = x.to(device), y.to(device)
pre = model(x)
loss = loss_fn(pre, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
with torch.no_grad():
train_correct += (pre.argmax(1) == y).type(torch.float).sum().item()
train_loss += loss.item()
train_correct /= size
train_loss /= num_of_batch
return train_correct, train_loss
3.test()
def test(test_dataloader, model, loss_fn):
size = len(test_dataloader.dataset)
num_of_batch = len(test_dataloader)
test_correct, test_loss = 0.0, 0.0
with torch.no_grad():
for x, y in test_dataloader:
x, y = x.to(device), y.to(device)
pre = model(x)
loss = loss_fn(pre, y)
test_loss += loss.item()
test_correct += (pre.argmax(1) == y).type(torch.float).sum().item()
test_correct /= size
test_loss /= num_of_batch
return test_correct, test_loss
五、训练循环函数
epochs = 10
train_acc = []
train_loss = []
test_acc = []
test_loss = []
for epoch in range(epochs):
printlog("Epoch: {0} / {1}".format(epoch, epochs))
model.train()
epoch_train_acc, epoch_train_loss = train(train_dataloader, model, loss_fn, optimizer)
model.eval()
epoch_test_acc, epoch_test_loss = test(test_dataloader, model, loss_fn)
train_acc.append(epoch_train_acc)
train_loss.append(epoch_train_loss)
test_acc.append(epoch_test_acc)
test_loss.append(epoch_test_loss)
template = ('train_loss:{:.5f}, train_acc:{:.5f}, test_loss:{:.5f}, test_acc:{:.5f}')
print(template.format(epoch_train_loss, epoch_train_acc, epoch_test_loss, epoch_test_acc))
print('done')
plt.plot(range(epochs), train_loss, label='train_loss')
plt.plot(range(epochs), train_acc, label='train_acc')
plt.plot(range(epochs), test_loss, label='test_loss')
plt.plot(range(epochs), test_acc, label='test_acc')
plt.legend()
plt.show()
print('done')
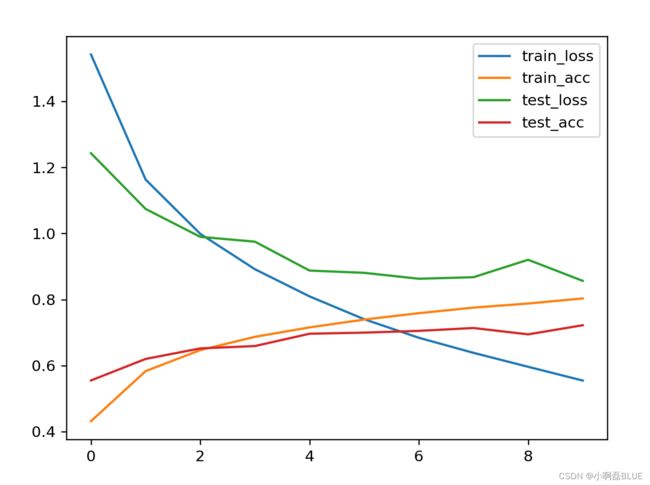
六、结果可视化

七、全部代码
import torch
from torch import nn
import numpy as np
import pandas as pd
import datetime
import matplotlib.pyplot as plt
import torch.nn.functional as F
from torch.utils.data import DataLoader
import torchvision
from torchvision.transforms import ToTensor
train_dataset = torchvision.datasets.CIFAR10(root='./cifar10',
transform=ToTensor(),
train=True,
download=True)
test_dataset = torchvision.datasets.CIFAR10(root='./cifar10',
transform=ToTensor(),
train=False,
download=True)
train_dataloader = DataLoader(train_dataset, batch_size=32, shuffle=True)
test_dataloader = DataLoader(test_dataset, batch_size=32, shuffle=False)
img_bath, label_batch = next(iter(train_dataloader))
print(img_bath.shape) # torch.Size([32, 3, 32, 32])
classes = ['airplane', 'automobile', 'bird', 'cat', 'deer',
'dog', 'frog', 'horse', 'ship', 'truck'] # 数据集的类别标记名称
plt.figure(figsize=(12, 8))
for i, (img, label) in enumerate(zip(img_bath[:6], label_batch[:6])):
img = img.permute(1, 2, 0).numpy()
plt.subplot(1, 6, i+1)
plt.title(classes[label.item()])
plt.imshow(img, cmap=plt.cm.binary)
plt.show()
def printlog(info):
nowtime = datetime.datetime.now().strftime('%Y-%m-%d %H:%M:%S')
print("\n"+"=========="*8 + '%s'%nowtime)
print(str(info)+"\n")
class Cnn_net_1(nn.Module):
def __init__(self):
super(Cnn_net_1, self).__init__()
self.c1 = nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, stride=1)
self.s1 = nn.MaxPool2d(kernel_size=2, stride=2)
self.c2 = nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1)
self.s2 = nn.MaxPool2d(kernel_size=2, stride=2)
self.c3 = nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1)
self.s3 = nn.MaxPool2d(kernel_size=2, stride=2)
self.l1 = nn.Linear(512, 256)
self.l2 = nn.Linear(256, 10)
def forward(self, x):
x = F.relu(self.c1(x))
x = self.s1(x)
x = F.relu(self.c2(x))
x = self.s2(x)
x = F.relu(self.c3(x))
x = self.s3(x)
x = x.view(-1, 128*2*2)
x = F.relu(self.l1(x))
x = self.l2(x)
return x
class Cnn_net_2(nn.Module):
def __init__(self):
super(Cnn_net_2, self).__init__()
self.c1 = nn.Sequential(
nn.Conv2d(in_channels=3, out_channels=64, kernel_size=3, stride=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(in_channels=64, out_channels=64, kernel_size=3, stride=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
nn.Conv2d(in_channels=64, out_channels=128, kernel_size=3, stride=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2)
)
self.l1 = nn.Sequential(
nn.Linear(512, 256),
nn.ReLU(),
nn.Linear(256, 10)
)
def forward(self, x):
x = self.c1(x)
x = x.view(-1, 512)
x = self.l1(x)
return x
device = 'cuda' if torch.cuda.is_available() else 'cpu'
model = Cnn_net_2().to(device)
optimizer = torch.optim.Adam(model.parameters(), lr=0.001)
loss_fn = nn.CrossEntropyLoss()
def train(train_dataloader, model, loss_fn, optimizer):
size = len(train_dataloader.dataset)
num_of_batch = len(train_dataloader)
train_correct, train_loss = 0.0, 0.0
for x, y in train_dataloader:
x, y = x.to(device), y.to(device)
pre = model(x)
loss = loss_fn(pre, y)
optimizer.zero_grad()
loss.backward()
optimizer.step()
with torch.no_grad():
train_correct += (pre.argmax(1) == y).type(torch.float).sum().item()
train_loss += loss.item()
train_correct /= size
train_loss /= num_of_batch
return train_correct, train_loss
def test(test_dataloader, model, loss_fn):
size = len(test_dataloader.dataset)
num_of_batch = len(test_dataloader)
test_correct, test_loss = 0.0, 0.0
with torch.no_grad():
for x, y in test_dataloader:
x, y = x.to(device), y.to(device)
pre = model(x)
loss = loss_fn(pre, y)
test_loss += loss.item()
test_correct += (pre.argmax(1) == y).type(torch.float).sum().item()
test_correct /= size
test_loss /= num_of_batch
return test_correct, test_loss
epochs = 10
train_acc = []
train_loss = []
test_acc = []
test_loss = []
for epoch in range(epochs):
printlog("Epoch: {0} / {1}".format(epoch, epochs))
model.train()
epoch_train_acc, epoch_train_loss = train(train_dataloader, model, loss_fn, optimizer)
model.eval()
epoch_test_acc, epoch_test_loss = test(test_dataloader, model, loss_fn)
train_acc.append(epoch_train_acc)
train_loss.append(epoch_train_loss)
test_acc.append(epoch_test_acc)
test_loss.append(epoch_test_loss)
template = ('train_loss:{:.5f}, train_acc:{:.5f}, test_loss:{:.5f}, test_acc:{:.5f}')
print(template.format(epoch_train_loss, epoch_train_acc, epoch_test_loss, epoch_test_acc))
print('done')
plt.plot(range(epochs), train_loss, label='train_loss')
plt.plot(range(epochs), train_acc, label='train_acc')
plt.plot(range(epochs), test_loss, label='test_loss')
plt.plot(range(epochs), test_acc, label='test_acc')
plt.legend()
plt.show()
print('done')
八、总结
对于这次彩色图片识别的程序编写, 总结如下:
1.知道如何操作和加载内置数据集的过程,以及在迭代查看数据集图片能清楚原理,torch存储图片的形式。
2.了解卷积,池化,全连接的基本作用和原理,知道推导过程。
3.会构建简单的CNN网络,了解内部前向传播的过程。
4.了解训练,测试的原理和过程。。