【MAX7800与ESP8266mcu串口通讯点灯】
【MAX7800与ESP8266mcu通讯】
- 1. 前言
- 2. 实验条件
-
- 2.1 硬件条件
- 2.2 软件条件
- 3. 程序编写
-
- 3.1 ESP8266程序解剖
- 3.2 MAX7800程序解剖
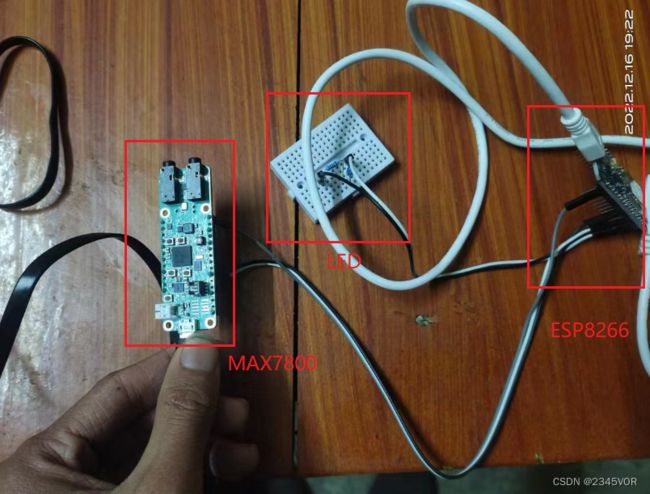
- 4. 实验效果
-
- 4.1 esp8266打印如下
- 4.2 max7800打印如下
- 5. 小结

1. 前言
前期搭好MAX7800 的eclipse和ESP82666的Arduino开发环境,现在开始慢慢实现这两者的通讯,目前MAX7800 羽毛板可以发送字符串,但是ESP8266无法连续接收,因此采用简单的单个字符的串口通讯实现点灯功能
不要问我D0为什么不行,波特率在9600以下都可以,因为它本身不适合
2. 实验条件
2.1 硬件条件
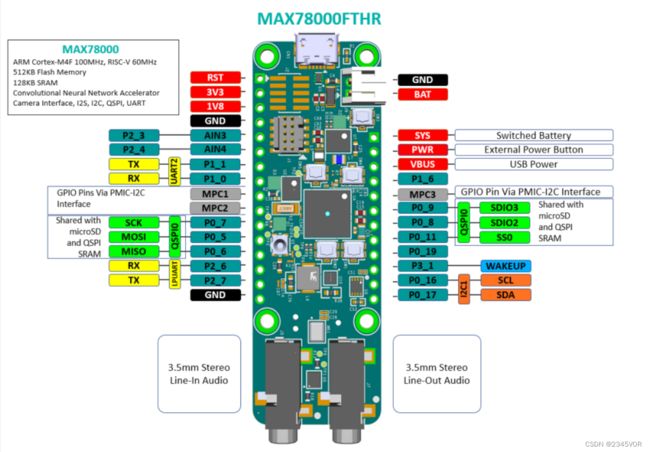
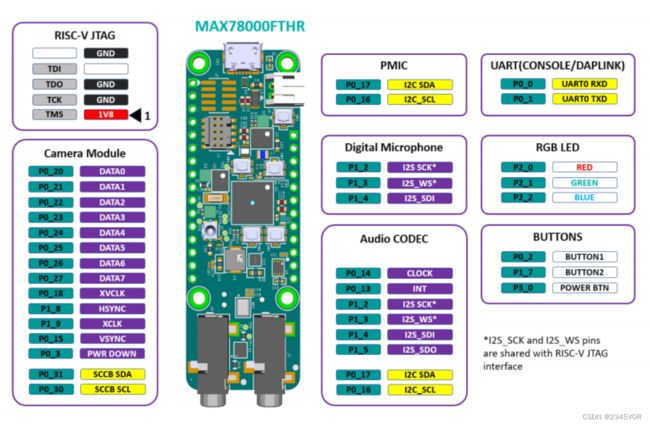
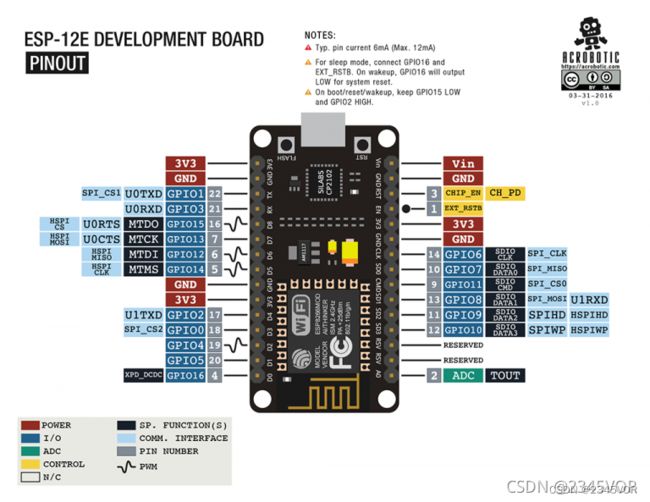
本次采用ESP8266node MCU开发板和MAX7800羽毛板,利用ESP8266软串口通讯与MAX7800 UART2硬串口搭建单字符通讯,采用关键字符实现开关灯功能
| 名称 | 端口 |
|---|---|
| LED | +接D2,-接GND |
| ESP8266 | P1_1接D3,P1_0接D1,GND接GND,mcro数据线 |
| MAX7800 | P1_1接D3,P1_0接D1,GND接GND,mcro数据线 |
2.2 软件条件
ESP8266-NodeMCU物联网开发之Arduino环境搭建
【window下配置Maxim SDK环境】
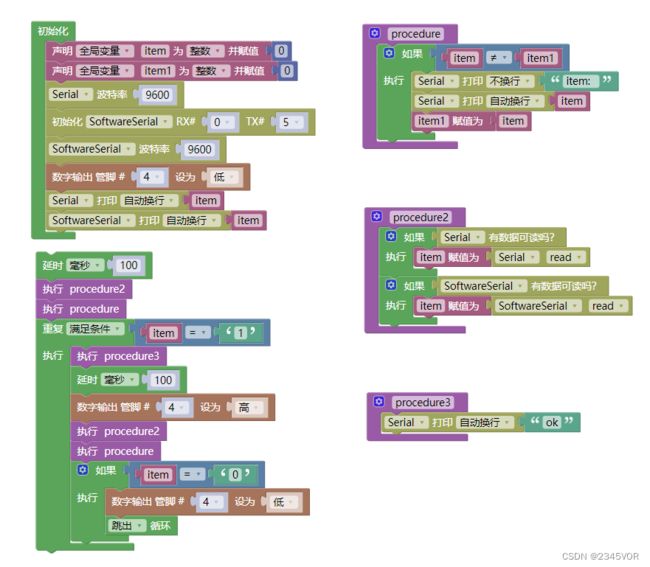
3. 程序编写
3.1 ESP8266程序解剖
三个子程序
- 读取软硬串口字符
- 打印两次不同的字符
- 测试
ok字符
主程序
- 读取软硬串口
- 判别是否为
ok - 是则灯亮,进而判别是否为
stop,退出
源代码
#include 3.2 MAX7800程序解剖
采用uart实例教程改写而成
按照1:4时间比例发送0和1,对此esp8266按照此间隔刷新LED灯亮灭
******************************************************************************/
/**
* @file main.c
* @brief UART!
* @details This example demonstrates the UART Loopback Test.
*/
/***** Includes *****/
#include 下面给出max7800输出字符串代码,无法与esp8266通讯,暂时没有找到原因
/**
* @file main.c
* @brief UART!
* @details This example demonstrates the UART Loopback Test.
*/
/***** Includes *****/
#include 4. 实验效果
4.1 esp8266打印如下
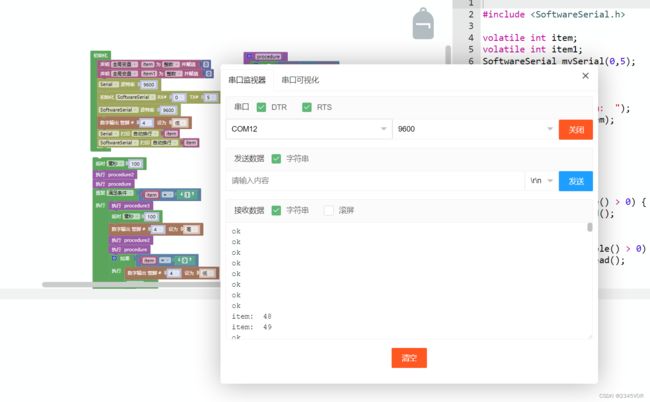
已打开串口: COM12
0
item: 49
ok
ok
ok
ok
ok
ok
ok
ok
item: 48
item: 49
4.2 max7800打印如下
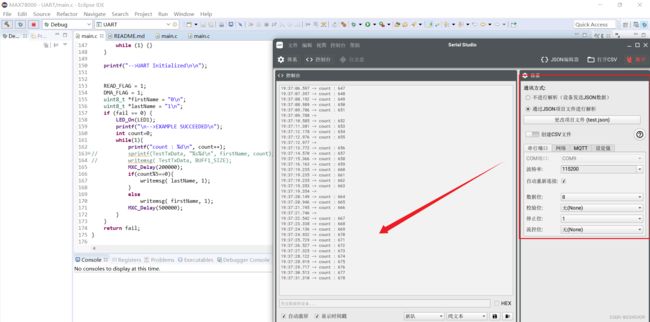
19:28:30.829 ->
19:28:30.829 ->
19:28:30.832 -> **************** UART Example ******************
19:28:30.834 -> This example sends data from one UART to another.
19:28:30.838 ->
19:28:30.838 -> Connect the TX pin of UART2 to the RX pin of UART2 for this example.
19:28:30.844 ->
19:28:30.844 -> -->UART Baud : 9600 Hz
19:28:30.846 ->
19:28:30.846 ->
19:28:30.846 -> -->Test Length : 1024 bytes
19:28:30.848 -> -->UART Initialized
19:28:30.850 ->
19:28:30.850 ->
19:28:30.850 -> -->EXAMPLE SUCCEEDED
19:28:30.853 -> count : 0
19:28:31.651 -> count : 1
19:28:32.448 -> count : 2
19:28:33.245 -> count : 3
19:28:34.042 -> count : 4
19:28:34.839 -> count : 5
5. 小结
通过对这篇文章我们掌握了MAX7800与ESP8266mcu串口通讯点灯,接下来会有许多有趣的实验,尝试与Arduino通讯做语音小车,进而丰富我们的生活。从而实现对外部世界进行感知,充分认识这个有机与无机的环境,科学地合理地进行创作和发挥效益,然后为人类社会发展贡献一点微薄之力。
再次非常感谢大赛支持和胡同学
参考文献:
window10下配置Maxim SDK
数据手册
MAX78000板卡项目汇总
应用笔记
【window下配置Maxim SDK环境】
【MAX78000基础案例演示】
MAX78000 关键字定位演示 v.3