Less is More_ Pay Less Attention in Vision Transformers论文解读
Less is More: Pay Less Attention in Vision Transformers 与Fast Vision Transformers with HiLo Attention论文解读
- 前言
- 1. LiT
-
- MLP取代MSA
- DTM
- 2. LiTv2
与Fast Vision Transformers with HiLo Attention论文解读)
前言
这篇文章介绍两篇论文,一篇是LiT,另一篇是它的改进版本LiTv2。LiT的创新点在于两个地方。第一点在4阶段的层次化vision transformer结构中使用两个线性层来取代一个阶段的多头自注意力。4个阶段前两个阶段都是mlp层。减少了计算量。第二点在于使用了Deformable Convolution来做patch merging.
改进版本LiTv2的创新点在于将原始版本的transformer块换成了文中提出的HiLo Attention块,这个attention块通过池化把特征图分为低频做自注意力提取低频全局特征,再拿原始特征图做自注意力提取局部特征,最后拼接两者得到输出。
论文地址:
LiT论文PDF地址
LiTv2论文PDF地址
代码地址:
LiT github代码地址
LiTv2 github代码地址
1. LiT
下图是LiT的整体架构图。

MLP取代MSA
可以看到LiT是4阶段,层次化的transformer。作者试图论证多头自注意力只要头数足够,就可以模拟逼近任何卷积层。单头注意力则与FC层比较类似。作者得出结论,既然这样可以尝试用卷积层去模拟自注意力层。当然作者也提示两者在实际应用上肯定是不等的。
最后作者使用了mlp层取代了前两个阶段,保留了后两个阶段的MSA.
class Mlp(nn.Module):
""" Multilayer perceptron."""
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.fc1 = nn.Linear(in_features, hidden_features)
self.act = act_layer()
self.fc2 = nn.Linear(hidden_features, out_features)
self.drop = nn.Dropout(drop)
def forward(self, x):
x = self.fc1(x)
x = self.act(x)
x = self.drop(x)
x = self.fc2(x)
x = self.drop(x)
return x
从代码可以看到mlp使用了两个线性层来代替MSA。Linear->GELU->Linear
DTM
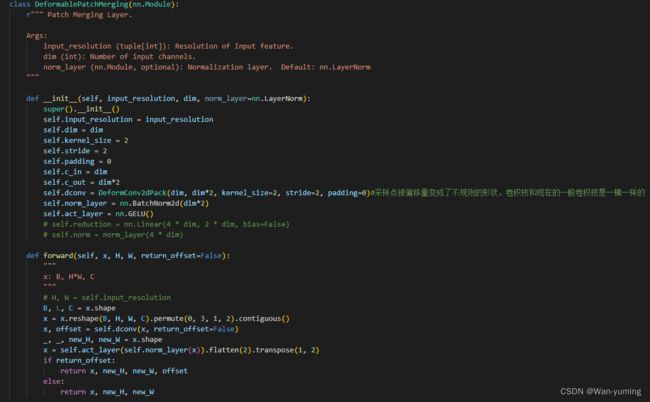
DTM(deformable token merging)。作者直接调用了封装好的形变卷积模块。这里按我的理解是形变卷积给采样点加了一个可学习参数,他会让采样点的位置发生偏移,随着学习到相关信息,偏移会转向信息集中的地方。

上面第一幅图代表了标准的3x3卷积,但是加上偏移量以后,采样点有可能出现不同方向的偏移,如第二张图。而第三张和第四张代表偏移时发生的特例。在本文中,第一阶段的patch embed用的是传统的卷积实现,剩余阶段的patch emerging,在patch逐渐变大的过程中是使用DTM实现的。作者为了展示DTM的效果,将可视化效果展示在下图。下图绿框代表卷积核,红色代表采样点。可以发现,确实可学习偏移将采样点分布在更加符合图像特征的地方。
上述即为LiT的两个创新点,实际上可说的点还是挺少的。而LiTv2在继承DTM和前两个MLP替代transformer阶段之后,对attention块进行了改进,提出了一种HiLo Attention的结构。
2. LiTv2
下图是LiTv2的整体架构。与Lit相比主要改动在于Transformer模块。现在我们详细考察一下本文提出的HiLo Attention。

下图为HiLo attention模块的架构图。我们先来介绍一下作者的理论。作者认为原始输入图像中含有丰富的频率,并且不同频率扮演不同的角色。类如高频信息含有丰富的局部细节特征。低频信息含有丰富的全局特征信息。传统的MSA直接对输入特征图做自注意力使得不同频率的信息混在一起。所以作者想从不同频率入手分别处理高频和低频信息。作者分了两条路径,分别是原图像大小和平均池化后的图像大小,作者认为分别从两者入手可以对高频/低频信息通过自注意力进行编码,提取。
从下图可以看出,上面的路径显然是高频处理路径,下面的是低频处理路径。作者为高频和低频分配不同数量的头。两者的和是原先设定的头的数量。具体分配给低频αN个头,分配给高频(1-α)N个头。N是设定的总的头的数量。例如N取8,α取0.75.那么低频可以分到6个头,高频可以分到2个头。至于α的取值,作者承认对于不同任务,适宜的α取值也不一样,需要手动调整。既然头被分割了,那代表着原输入特征图的维度也需要分割。例如输入特征图维度取64,那么按上面举例的取值,高频特征图的维度需要取16,低频特征图的维度需要取48,以方便处理。但是分割维度并不是直接分割,将64按16和48分开会让高频和低频图损失对方拥有的信息,所以作者通过线性层将维度降低到高频和低频的维度,这样可以减少分割维度所造成的信息损失。
高频图像采用窗口划分来做自注意力,而低频图像需要先对高频图像做kernel size=window size,stride=window sdize的平均池化才能获取。接着就是上面所提的划分头和划分维度。接下来就是attention的计算过程了。高频attention我们称之为Hi-Fi.qkv就是直接通过线性层来取,qkv的shape(B, hw, n_head, wsws, head_dim),ws是window_size,我们可以只看(wsws, head_dim),qkT 的shape(wsws,wsws),再乘以v,shape变为(wsws, head_dim)。通过窗口划分减小了计算量,提高了计算效率。

接下来看看Lo-Fi也就是低分辨率的attention过程。详见下方代码def lofi(self, x),这里需要注意,低频attention的q用的是在高频图取的q,(B,n_head,HW,head_dim),K与V在低频图取,(B,n_head,HW/SS,head_dim),这里n_head应该是低频图的分配的头的数量。这样计算下来,qkT的shape变为(B,n_head,HW,HW/SS),再乘以v后shape变为(B,n_head,HW,head_dim),这样下来可以发现不需要插值,只需要简单的reshape(B,H,W,C_LOFI)就能与高频图concat。并且concat后,维度加起来正好是原输入特征图的维度。这就是HiLo Attention的过程。
class HiLo(nn.Module):
"""
HiLo Attention
Link: https://arxiv.org/abs/2205.13213
"""
def __init__(self, dim, num_heads=8, qkv_bias=False, qk_scale=None, attn_drop=0., proj_drop=0., window_size=2, alpha=0.5):
super().__init__()
assert dim % num_heads == 0, f"dim {dim} should be divided by num_heads {num_heads}."
head_dim = int(dim/num_heads)
self.dim = dim
# self-attention heads in Lo-Fi
self.l_heads = int(num_heads * alpha)
# token dimension in Lo-Fi
self.l_dim = self.l_heads * head_dim
# self-attention heads in Hi-Fi
self.h_heads = num_heads - self.l_heads
# token dimension in Hi-Fi
self.h_dim = self.h_heads * head_dim
# local window size. The `s` in our paper.
self.ws = window_size
if self.ws == 1:
# ws == 1 is equal to a standard multi-head self-attention
self.h_heads = 0
self.h_dim = 0
self.l_heads = num_heads
self.l_dim = dim
self.scale = qk_scale or head_dim ** -0.5
# Low frequence attention (Lo-Fi)
if self.l_heads > 0:
if self.ws != 1:
self.sr = nn.AvgPool2d(kernel_size=window_size, stride=window_size)
self.l_q = nn.Linear(self.dim, self.l_dim, bias=qkv_bias)
self.l_kv = nn.Linear(self.dim, self.l_dim * 2, bias=qkv_bias)
self.l_proj = nn.Linear(self.l_dim, self.l_dim)
# High frequence attention (Hi-Fi)
if self.h_heads > 0:
self.h_qkv = nn.Linear(self.dim, self.h_dim * 3, bias=qkv_bias)
self.h_proj = nn.Linear(self.h_dim, self.h_dim)
def hifi(self, x):
B, H, W, C = x.shape
h_group, w_group = H // self.ws, W // self.ws
total_groups = h_group * w_group
x = x.reshape(B, h_group, self.ws, w_group, self.ws, C).transpose(2, 3)#B,H_GROUP,W_GROUP,WS,WS,C
qkv = self.h_qkv(x).reshape(B, total_groups, -1, 3, self.h_heads, self.h_dim // self.h_heads).permute(3, 0, 1, 4, 2, 5)
q, k, v = qkv[0], qkv[1], qkv[2] # B, hw, n_head, ws*ws, head_dim
attn = (q @ k.transpose(-2, -1)) * self.scale # B, hw, n_head, ws*ws, ws*ws
attn = attn.softmax(dim=-1)
attn = (attn @ v).transpose(2, 3).reshape(B, h_group, w_group, self.ws, self.ws, self.h_dim)
x = attn.transpose(2, 3).reshape(B, h_group * self.ws, w_group * self.ws, self.h_dim)
x = self.h_proj(x)
return x
def lofi(self, x):#x是完整的特征图输入
B, H, W, C = x.shape
q = self.l_q(x).reshape(B, H * W, self.l_heads, self.l_dim // self.l_heads).permute(0, 2, 1, 3)#(B,L_HEAD,H*W,L_DIM/L_HEAD)
#从原输入取Q
if self.ws > 1:
x_ = x.permute(0, 3, 1, 2)#(B,C,H,W)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)#B,H*W/S*S,C
kv = self.l_kv(x_).reshape(B, -1, 2, self.l_heads, self.l_dim // self.l_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.l_kv(x).reshape(B, -1, 2, self.l_heads, self.l_dim // self.l_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
#K和V(B,num_head,H*W/S*S,C/num_head),q是原尺寸,这样运算结果是原尺寸。
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
x = (attn @ v).transpose(1, 2).reshape(B, H, W, self.l_dim)
x = self.l_proj(x)
return x
def forward(self, x, H, W):
B, N, C = x.shape
x = x.reshape(B, H, W, C)
# pad feature maps to multiples of window size
pad_l = pad_t = 0
pad_r = (self.ws - W % self.ws) % self.ws
pad_b = (self.ws - H % self.ws) % self.ws
x = F.pad(x, (0, 0, pad_l, pad_r, pad_t, pad_b))
if self.h_heads == 0:
x = self.lofi(x)
if pad_r > 0 or pad_b > 0:
x = x[:, :H, :W, :]
return x.reshape(B, N, C)
if self.l_heads == 0:
x = self.hifi(x)
if pad_r > 0 or pad_b > 0:
x = x[:, :H, :W, :]
return x.reshape(B, N, C)
hifi_out = self.hifi(x)
lofi_out = self.lofi(x)
if pad_r > 0 or pad_b > 0:
x = torch.cat((hifi_out[:, :H, :W, :], lofi_out[:, :H, :W, :]), dim=-1)
else:
x = torch.cat((hifi_out, lofi_out), dim=-1)
#不是简单分割,而是通过linear浓缩。然后再拼接成原来维度。
x = x.reshape(B, N, C)
return x
此外,还在FFN层中增加了3x3卷积和零填充来替代position embed.