使用U版pytorch yolov5代码训练自己的目标检测模型
开源代码地址:https://github.com/ultralytics/yolov5
1、训练数据准备
yolo系列算法的训练数据存储格式不同于voc和coco,yolov5训练数据的构造参考Train Custom Data。
a)、yolov5算法的数据存放结构如下:
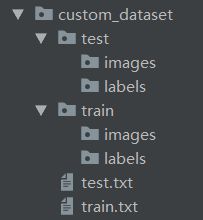
其中,train目录中存放训练集数据,test目录中存放验证集数据,train和test目录下的images目录中存放训练集和验证集图片,labels目录中用于存放训练集和验证集的标签label,其中images和labels中的文件的文件名一一对应,示例如下:
train/images/im0.jpg # image
train/labels/im0.txt # labelb)、label中标签的存储方式
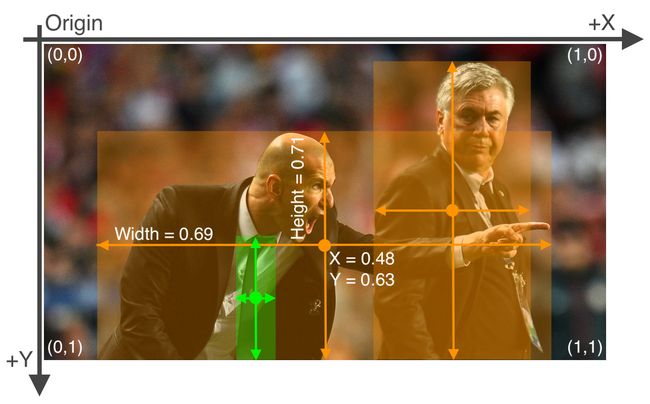
label目录中的每个txt文件中每行表示一个目标对象,使用五元组(class_id, x, y, w, h)来表示一个目标对象,其中class_id从0开始,表示目标类别的编号,x,y表示目标区域中心点的坐标,w,h表示目标区域的宽和高。并且,x和w是关于图像的width归一化0到1之间的结果,y和h是关于图像的height归一化到0到1之间的结果。
c)、train.txt中每行存储一个train/images目录下的图片路径,test.txt中每行存储一个test/images目录下的图片路径。
2、修改训练数据配置文件
复制一份data/coco.yaml配置文件,命名为data/custom.yaml,修改配置文件如下:
# 可以配置绝对路径,示例中将train.txt和test.txt放在data目录下
# 训练集
train: ./data/train.txt
# 验证集
val: ./data/test.txt
# 测试集
test: ./data/test.txt
# 类别数量
nc: 2
# 类别名称,类别名称顺序和class_id序号对应
names: [ 'cat', 'dog']3、重新生成anchor box坐标
在yolo系列算法中,yolov1没有使用anchor,这也导致yolov1算法的召回率和准确率都较低,从yolo2算法开始使用anchor,并且与Faster RCNN算法使用固定尺度的anchor大小不同,yolov2算法使用聚类方法计算anchor box的大小,这样得到的anchor box比使用固定大小的anchor box更符合训练样本中目标的大小分布。yolov5算法中提供了一个计算训练集anchor分布的脚本utils/autoanchor.py,直接调用kmean_anchors计算anchor box:

其中,path参数是第二步中修改后的配置文件,n表示anchor box的数量,也就是聚类中心的数量,img_size表示最终训练模型时使用的图片的长边大小 。
4、修改网络模型配置文件
复制一份models/yolov5s.yaml配置文件,命名为models/yolov5s-custom.yaml,修改配置文件如下:
# parameters
nc: 2 # 类别数量
depth_multiple: 0.33 # model depth multiple,模型深度扩展系数
width_multiple: 0.50 # layer channel multiple,模型宽度(通道数)扩展系数
# anchors, anchor替换为使用kmean_anchors聚类得到的anchor大小
anchors:
- [10,13, 16,30, 33,23] # P3/8 # 检测小目标
- [30,61, 62,45, 59,119] # P4/16 # 检测中等目标
- [116,90, 156,198, 373,326] # P5/32 # 检测大目标
# YOLOv5 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Focus, [64, 3]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, C3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 9, C3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, C3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 1, SPP, [1024, [5, 9, 13]]],
[-1, 3, C3, [1024, False]], # 9
]
# YOLOv5 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]
5、模型训练train.py
下面看一下train.py的重点参数配置:
if __name__ == '__main__':
parser = argparse.ArgumentParser()
# 预训练权重
parser.add_argument('--weights', type=str, default='yolov5s.pt', help='initial weights path')
# 网络模型配置文件models/yolov5s-custom.yaml
parser.add_argument('--cfg', type=str, default='', help='model.yaml path')
# 训练数据配置文件data/custom.yaml
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='data.yaml path')
# 超参数配置文件,data/hyp.scratch.yaml是从头开始训练的超参数配置
# data/hyp.finetune.yaml是微调训练模型的超参数配置
parser.add_argument('--hyp', type=str, default='data/hyp.scratch.yaml', help='hyperparameters path')
# 训练迭代轮数
parser.add_argument('--epochs', type=int, default=300)
parser.add_argument('--batch-size', type=int, default=16, help='total batch size for all GPUs')
# 训练图片大小
parser.add_argument('--img-size', nargs='+', type=int, default=[640, 640], help='[train, test] image sizes')
# 是否使用矩形训练,矩形训练是关于batch size中图像大小不一致时,对图像进行最小噪声填充的方法
parser.add_argument('--rect', action='store_true', help='rectangular training')
# 中断恢复训练
parser.add_argument('--resume', nargs='?', const=True, default=False, help='resume most recent training')
parser.add_argument('--nosave', action='store_true', help='only save final checkpoint')
parser.add_argument('--notest', action='store_true', help='only test final epoch')
parser.add_argument('--noautoanchor', action='store_true', help='disable autoanchor check')
parser.add_argument('--evolve', action='store_true', help='evolve hyperparameters')
parser.add_argument('--bucket', type=str, default='', help='gsutil bucket')
parser.add_argument('--cache-images', action='store_true', help='cache images for faster training')
parser.add_argument('--image-weights', action='store_true', help='use weighted image selection for training')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--multi-scale', action='store_true', help='vary img-size +/- 50%%')
parser.add_argument('--single-cls', action='store_true', help='train multi-class data as single-class')
parser.add_argument('--adam', action='store_true', help='use torch.optim.Adam() optimizer')
parser.add_argument('--sync-bn', action='store_true', help='use SyncBatchNorm, only available in DDP mode')
parser.add_argument('--local_rank', type=int, default=-1, help='DDP parameter, do not modify')
parser.add_argument('--workers', type=int, default=8, help='maximum number of dataloader workers')
parser.add_argument('--project', default='runs/train', help='save to project/name')
parser.add_argument('--entity', default=None, help='W&B entity')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--quad', action='store_true', help='quad dataloader')
parser.add_argument('--linear-lr', action='store_true', help='linear LR')
parser.add_argument('--label-smoothing', type=float, default=0.0, help='Label smoothing epsilon')
parser.add_argument('--upload_dataset', action='store_true', help='Upload dataset as W&B artifact table')
parser.add_argument('--bbox_interval', type=int, default=-1, help='Set bounding-box image logging interval for W&B')
parser.add_argument('--save_period', type=int, default=-1, help='Log model after every "save_period" epoch')
parser.add_argument('--artifact_alias', type=str, default="latest", help='version of dataset artifact to be used')
opt = parser.parse_args()模型训练过程中的输出指标解读:
P:precision,准确率
R:recall,召回率
mAP:mean average precision,平均准确率
[email protected]: IoU为0.5的平均准确率
[email protected]:.95:IoU为0.5, 0.55, 0.6, 0.65, ……,0.95的平均准确率
该版本代码在训练过程中使用metric.py模块中的fitness函数来衡量模型的性能,fitness通过权衡P、R、[email protected]、[email protected]:.95多种指标来得到偏向不同指标的最佳模型,fitness函数如下:
def fitness(x):
# Model fitness as a weighted combination of metrics
w = [0.0, 0.0, 0.1, 0.9] # weights for [P, R, [email protected], [email protected]:0.95]
return (x[:, :4] * w).sum(1)默认情况下, P、R、[email protected]、[email protected]:.95对于模型性能的权重为[0.0, 0.0, 0.1, 0.9],如果想让得到的最优模型更加关注召回率,可以将R对应的权重设置的大一些,如果更加关注预测结果的准确率,可以将P设置的大一些, P、R、[email protected]、[email protected]:.95权重的和等于1.
6、模型测试集评估test.py
下面看一下test.py的重点参数配置:
if __name__ == '__main__':
parser = argparse.ArgumentParser(prog='test.py')
# 模型地址
parser.add_argument('--weights', nargs='+', type=str, default='yolov5s.pt',
help='model.pt path(s)')
# 步骤2中配置的data/custom.yaml数据集配置文件
parser.add_argument('--data', type=str, default='data/coco128.yaml', help='*.data path')
# 同上
parser.add_argument('--batch-size', type=int, default=32, help='size of each image batch')
# 同上
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
# 预测为正确的置信度阈值
parser.add_argument('--conf-thres', type=float, default=0.001, help='object confidence threshold')
# IoU的阈值
parser.add_argument('--iou-thres', type=float, default=0.6, help='IOU threshold for NMS')
# 使用模型评估训练集、验证集或者测试集
parser.add_argument('--task', default='val', help='train, val, test, speed or study')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--single-cls', action='store_true', help='treat as single-class dataset')
# 是否在模型推理阶段使用数据增强,也就是TTA(Test Time Augment)
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--verbose', action='store_true', help='report mAP by class')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-hybrid', action='store_true', help='save label+prediction hybrid results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-json', action='store_true', help='save a cocoapi-compatible JSON results file')
parser.add_argument('--project', default='runs/test', help='save to project/name')
parser.add_argument('--name', default='exp', help='save to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--half', type=bool, default=False, help='use FP16 half-precision inference')模型的预测性能和--conf-thresh、--iou-thresh呈负相关, --conf-thresh、--iou-thresh越高,则模型的性能指标就越低。test.py会输出每种目标类别在当前 --conf-thresh、--iou-thresh阈值设置下的P、R、[email protected]、[email protected]:.95具体数值,以及模型在所有目标类别上的平均值。
7、模型预测detect.py
下面看一下detect.py的重点参数配置:
if __name__ == '__main__':
parser = argparse.ArgumentParser()
# 模型地址
parser.add_argument('--weights', nargs='+', type=str, default='yolov5s.pt', help='model.pt path(s)')
# 待检测的图像目录
parser.add_argument('--source', type=str, default='data/images', help='source') # file/folder, 0 for webcam
parser.add_argument('--img-size', type=int, default=640, help='inference size (pixels)')
# 类别预测置信度阈值
parser.add_argument('--conf-thres', type=float, default=0.25, help='object confidence threshold')
# 预测bbox的IoU置信度阈值
parser.add_argument('--iou-thres', type=float, default=0.45, help='IOU threshold for NMS')
# 每张图片上最多检测的目标数量
parser.add_argument('--max-det', type=int, default=1000, help='maximum number of detections per image')
parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu')
parser.add_argument('--view-img', action='store_true', help='display results')
parser.add_argument('--save-txt', action='store_true', help='save results to *.txt')
parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels')
parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes')
parser.add_argument('--nosave', action='store_true', help='do not save images/videos')
parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --class 0, or --class 0 2 3')
parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS')
# 是否进行推理阶段的数据增强,同test.py
parser.add_argument('--augment', action='store_true', help='augmented inference')
parser.add_argument('--update', action='store_true', help='update all models')
parser.add_argument('--project', default='runs/detect', help='save results to project/name')
parser.add_argument('--name', default='exp', help='save results to project/name')
parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment')
parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)')
parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels')
parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences')
parser.add_argument('--half', type=bool, default=False, help='use FP16 half-precision inference')detect.py的预测结果保存在run/detect目录下。