论文阅读笔记:HetGAT: a heterogeneous graph attention network for freeway traffic speed prediction
针对异质性,即特征异质性(交通流交通速度,动态;路网道路数,静态)采用注意力机制实现。
针对高速路道路交通速度情况预测
4 methodology
4.1temporal attention network
4.1.1 heterogeneous sequential data
在我们的模型中,多个因素在不同的交通条件下有其特殊的趋势。例如,交通流量和交通速度是动态的连续数据,交通道路是静态的路线网络,而车道数偶尔会发生变化。因此,我们需要适当地整合所有这些异质的数据源。由于速度和交通流量属性的不同尺度,我们需要首先进行数据的标准化处理。在此,我们使用Z-score归一化,使用均值mean(⋅)和均值的标准差std(⋅),更新后的序列数据m′计算如下:

其中m′是速度V或流速F。然后我们每5分钟计算一次数值,在一小时内生成一系列的m′,如X = x1, x2, ..., xt 。接下来,我们将车道数的信息直接串联成顺序数据。最后,我们进行一个非线性变换,表示为

其中W和b是可学习的参数,LeakyReLU是激活函数,它对负值有一个小斜率,而不是ReLU中的精确零值。
4.1.2 dilated convolution layer
我们采用tempo ral卷积网络(TCN)的强大卷积方法(Bai等人,2018),并通过扩张卷积网络处理不同长度的输入和输出序列。扩张卷积在不损失分辨率或收敛性的情况下,以指数形式扩大了传感器的接受域,而参数的数量则是线性增长。更大的内核感受区增加了捕捉时间背景的净工作能力,这对重建大型复杂的边缘结构是非常重要的。我们提出了两个卷积层。DilatedConv1D用于时间维度,DilatedConv2D用于同时考虑空间和时间维度。我们使用以下tanh和o激活函数。
4.2 heterogeneous graph attention model
4.2.1 traffic network graph
由于交通状况的演变受到基础道路网络的限制,将后者的信息纳入预测模型至关重要。如图3所示,交通网络中有两种类型的节点:观测传感器Oi和收费站Ti,所有的传感器Oi都在一个方向上,而收费站Ti在路上。然后我们可以根据物理网络结构构建一个有向图。很明显,上游流量会影响到下游流量,但反之则不然。例如,传感器O2可以影响传感器O3和O4,而收费站T1可以影响传感器O3和O4。因此,该图有一条有向边和两种不同类型的节点,如图3所示。
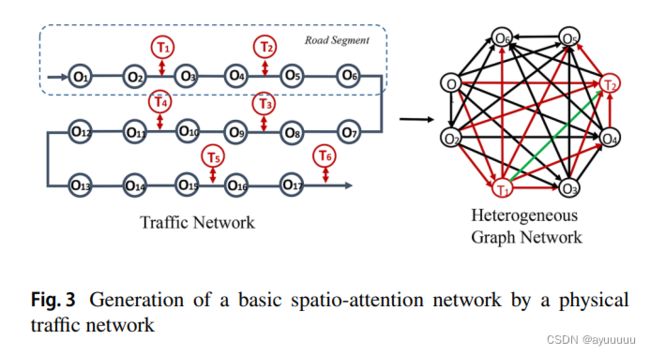
我们用G = (V, E, Ov, RE)来表示具有多个交通设施的图结构。在图G中,V是一个顶点,E是一条边,Ov是不同节点(传感器和收费站)的类型集,RE是不同边的类型集(传感器-传感器,传感器-收费站,收费-收费站)。
4.2.2 node masking(结点屏蔽)
TCN模块处理的数据包含所有节点的特征,而道路(节点)状态只与它的上游节点有关,这意味着如果我们在预测一个节点的速度时不屏蔽下游节点,可能会出现不必要的学习。
基于上述高速公路的单向性,如果我们使用邻接矩阵来恢复空间拓扑结构,我们可以得到一个上三角矩阵。这种特殊的属性可以用来掩盖下游节点的特征。邻接矩阵M是n×n,其中n是节点的总数量。由TCN模块处理的三维矢量h=(h1, h2, ..., ht)是一个n×t×m的矩阵,其中t是序列时间步数,m是每个节点的特征数,在我们的模型中等于3(车辆速度、高速公路流量和收费流量)。我们将矩阵的下三角元素设置为零,因此无法到达的节点的特征可以被屏蔽,如下所示,矩阵M中的元素dij代表每对节点的距离。

4.2.3 graph attention learner
以上,我们已经生成了一个有向图,并将一个表示向量与图中的每个节点联系起来。在这里,我们利用图注意网络(GATs),这是一种新型的神经网络架构,在图结构的数据上操作,利用掩蔽的自我注意层。在GAT模型中,节点ei和节点j的注意系数aij与节点j的特征对节点ei的重要性有关,可以表示为

4.3 prediction algorithm procedure
在交通预测的训练中,有两个必要的输入:X = (x1, x2, ..., xt), G = (V, E, O⊑, RE)分别代表t时间步长的时间序列和异质图。
在训练之前,HetGAT模型有三个重要模块需要初始化。FC模块首先将输入通过卷积层,卷积层大小为1×1,然后使用LeakyReLU来激活它。TCN模块将FC模块的输出通过滤波卷积和门卷积,分别用sigmoid和tanh来激活它。GAT模块接收来自TCN模块和由收费站和传感器组成的异质图的输出,以捕捉部分依赖性。
在模型训练过程中,亚当算法被用来优化梯度下降过程。我们将训练数据分成trainX和trainY,然后trainX经过归一化和加偏程序被送入HetGAT模型。最后,预测结果被倒置,损失与trainY一起被计算。时间注意模块和异质图注意模块是这个模型最重要的两个部分。在我们的模型中,输入首先通过时间注意模块来获得关于时间的高维特征,然后通过B来获得关于空间的高维特征。实验的伪代码如下。

5.5 experimental results
5.5.2 analysis with cases
预测步骤比较 我们在图5中展示了不同步骤长度的预测结果,该图显示了在5到60分钟的不同持续时间内预测的交通速度的MAE和RMSE值。GCN_LSTM模型的MAE和RMSE值随着步长的变化而上升和下降,但其他模型则比较稳定。我们还发现,我们的HetGAT模型在所有的步长上都比其他模型好得多,而且随着预测步长的增加,我们模型的优势变得更加明显。此外,它的RMSE性能在长的时间步长(如60分钟)中略有下降,这反映了它在长期预测中的优势。
我们在图6中展示了不同车道数的速度变化。我们观察到:在17:50之前,由于交通事故和其他原因,有效车道数为4条,在此期间速度大幅下降;17:50之后,有效车道数增加到5条,整体速度增加,变得更加稳定。
从实际值和预测值的曲线中可以看出,低车道数的预测性能比高车道数的预测性能要差,例如,在17:00有很大的偏差,这是因为小车道数往往意味着特殊的交通状况,如交通事故或道路维修。尽管在车速变化较大的情况下很难准确预测车速值,但由于我们改进的TCN层和GAT层对时空特征的提取,我们的模型仍然预测了17点时的车速下降趋势。
立交的影响 在高速公路上,匝道起着分流和合流的作用。在分流的情况下,主干道上的交通流量将减少,而在合并的情况下,主干道的交通流量将增加。考虑到交叉口区域的交通流变化更加激烈,它也可能导致车辆速度的下降。为了讨论交叉口和非交叉口之间的差异,我们分别选择了位于这两个不同区域的两个检测器的预测结果。结果显示为预测曲线、真实曲线和图7和图8中的MAE值。我们可以看到,交汇处的车速比非交汇处的车速要慢,交汇处的风速比非交汇处的要大得多。因此,非交汇区的速度预测的准确性要高于交汇区,这里的MAE值显示了这一点。
6 conclusions and future work
综上所述,我们提出了一个异质图时空注意网络(HetGAT)来进行未来多个时间步长的交通速度预测。值得注意的是,利用门控扩张卷积法来捕捉时间维度上的特征,并引入了修订后的图注意机制来探索节点传播的影响,目的是提高长期预测性能。在三个真实世界的数据集上也进行了实验来验证所提出的方法。结果显示,与现有方法相比,HetGAT产生了最先进的性能,包括最近的深度学习模型。结果还表明,HetGAT在较长的时间步长(长达60分钟)的预测准确性方面的优势。