PyTorch深度学习(20)网络结构DenseNet
一、网络结构
1、DenseNet网络结构
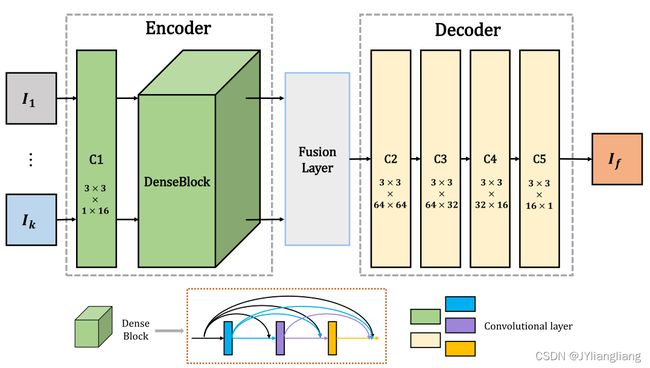

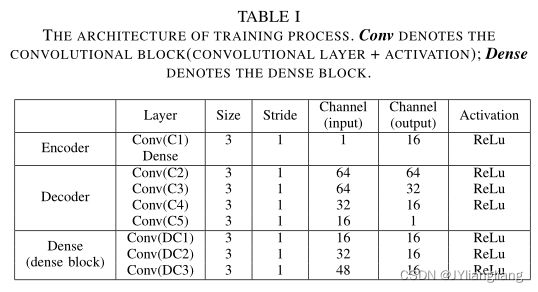
2、密集块及卷积层数据
二、代码详情
1、网络代码
import numpy as np
import torch
import torch.nn as nn
import torch.nn.functional as F
import fusion_strategy
# 卷积层
class ConvLayer(torch.nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride, is_last=False):
super(ConvLayer, self).__init__()
reflection_padding = int(np.floor(kernel_size / 2))
self.reflection_pad = nn.ReflectionPad2d(reflection_padding)
self.conv2d = nn.Conv2d(in_channels, out_channels, kernel_size, stride)
self.dropout = nn.Dropout2d(p=0.5)
self.is_last = is_last
def forward(self, x):
out = self.reflection_pad(x)
out = self.conv2d(out)
if self.is_last is False:
# out = F.normalize(out)
out = F.relu(out, inplace=True)
# out = self.dropout(out)
return out
# 密集卷积
class DenseConv2d(torch.nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride):
super(DenseConv2d, self).__init__()
self.dense_conv = ConvLayer(in_channels, out_channels, kernel_size, stride)
def forward(self, x):
out = self.dense_conv(x)
out = torch.cat([x, out], 1)
return out
# 密集块
class DenseBlock(torch.nn.Module):
def __init__(self, in_channels, kernel_size, stride):
super(DenseBlock, self).__init__()
out_channels_def = 16
denseblock = []
denseblock += [DenseConv2d(in_channels, out_channels_def, kernel_size, stride),
DenseConv2d(in_channels + out_channels_def, out_channels_def, kernel_size, stride),
DenseConv2d(in_channels + out_channels_def * 2, out_channels_def, kernel_size, stride)]
self.denseblock = nn.Sequential(*denseblock)
def forward(self, x):
out = self.denseblock(x)
return out
# 密集融合网络
class DenseFuseNet(nn.Module):
def __init__(self, input_nc=1, output_nc=1): # 输入通道、输出通道均为1
super(DenseFuseNet, self).__init__()
denseblock = DenseBlock
nb_filter = [16, 64, 32, 16]
kernel_size = 3
stride = 1
# encoder
self.conv1 = ConvLayer(input_nc, nb_filter[0], kernel_size, stride)
self.DB1 = denseblock(nb_filter[0], kernel_size, stride)
# decoder
self.conv2 = ConvLayer(nb_filter[1], nb_filter[1], kernel_size, stride)
self.conv3 = ConvLayer(nb_filter[1], nb_filter[2], kernel_size, stride)
self.conv4 = ConvLayer(nb_filter[2], nb_filter[3], kernel_size, stride)
self.conv5 = ConvLayer(nb_filter[3], output_nc, kernel_size, stride)
def encoder(self, input):
x1 = self.conv1(input)
x_DB = self.DB1(x1)
return [x_DB]
def fusion(self, en1, en2, strategy_type='addition'):
f_0 = (en1[0] + en2[0])/2
return [f_0]
def decoder(self, f_en):
x2 = self.conv2(f_en[0])
x3 = self.conv3(x2)
x4 = self.conv4(x3)
output = self.conv5(x4)
return [output]
2、训练代码
# Training DenseFuse network
# auto-encoder
import os
import sys
import time
import numpy as np
from tqdm import tqdm, trange # 进度条显示工具
import scipy.io as scio
import random
import torch
from torch.optim import Adam
from torch.autograd import Variable
import utils
from net import DenseFuseNet
from args_fusion import args
import pytorch_msssim
def main():
# os.environ["CUDA_VISIBLE_DEVICES"] = "3"
original_imgs_path = utils.list_images(args.dataset) # 根据训练图片路径获取图片
train_num = 40000
original_imgs_path = original_imgs_path[:train_num]
random.shuffle(original_imgs_path)
# for i in range(5):
i = 2
train(i, original_imgs_path)
def train(i, original_imgs_path):
batch_size = args.batch_size
# 网络图像类型 1:灰度图 3:RGB图
in_c = 1 # 输入通道 1 - gray; 3 - RGB
if in_c == 1:
img_model = 'L'
else:
img_model = 'RGB'
input_nc = in_c
output_nc = in_c
densefuse_model = DenseFuseNet(input_nc, output_nc) # 获取融合网络模型
if args.resume is not None:
print('Resuming, initializing using weight from {}.'.format(args.resume))
densefuse_model.load_state_dict(torch.load(args.resume))
print(densefuse_model)
optimizer = Adam(densefuse_model.parameters(), args.lr) # 优化器
mse_loss = torch.nn.MSELoss() # 均方差损失函数
ssim_loss = pytorch_msssim.msssim # SSIM损失函数
if args.cuda:
densefuse_model.cuda()
tbar = trange(args.epochs) # 进度条
print('Start training.....')
# 创建保存路径
temp_path_model = os.path.join(args.save_model_dir, args.ssim_path[i])
if os.path.exists(temp_path_model) is False:
os.mkdir(temp_path_model)
temp_path_loss = os.path.join(args.save_loss_dir, args.ssim_path[i])
if os.path.exists(temp_path_loss) is False:
os.mkdir(temp_path_loss)
loss_pixel = []
loss_ssim = []
loss_all = []
all_ssim_loss = 0.
all_pixel_loss = 0.
for e in tbar: # 批次
print('Epoch %d.....' % e)
# 加载训练数据
image_set_ir, batches = utils.load_dataset(original_imgs_path, batch_size)
densefuse_model.train()
count = 0
for batch in range(batches):
image_paths = image_set_ir[batch * batch_size:(batch * batch_size + batch_size)]
img = utils.get_train_images_auto(image_paths, height=args.HEIGHT, width=args.WIDTH, mode=img_model)
count += 1
optimizer.zero_grad()
img = Variable(img, requires_grad=False)
if args.cuda:
img = img.cuda()
# 获得融合图像
# encoder
en = densefuse_model.encoder(img)
# decoder
outputs = densefuse_model.decoder(en)
# resolution loss
x = Variable(img.data.clone(), requires_grad=False)
ssim_loss_value = 0.
pixel_loss_value = 0.
for output in outputs:
pixel_loss_temp = mse_loss(output, x)
ssim_loss_temp = ssim_loss(output, x, normalize=True)
ssim_loss_value += (1 - ssim_loss_temp)
pixel_loss_value += pixel_loss_temp
ssim_loss_value /= len(outputs)
pixel_loss_value /= len(outputs)
# total loss
total_loss = pixel_loss_value + args.ssim_weight[i] * ssim_loss_value
total_loss.backward()
optimizer.step()
all_ssim_loss += ssim_loss_value.item()
all_pixel_loss += pixel_loss_value.item()
if (batch + 1) % args.log_interval == 0:
mesg = "{}\tEpoch {}:\t[{}/{}]\t pixel loss: {:.6f}\t ssim loss: {:.6f}\t total: {:.6f}".format(
time.ctime(), e + 1, count, batches,
all_pixel_loss / args.log_interval,
all_ssim_loss / args.log_interval,
(args.ssim_weight[i] * all_ssim_loss + all_pixel_loss) / args.log_interval
)
tbar.set_description(mesg)
loss_pixel.append(all_pixel_loss / args.log_interval)
loss_ssim.append(all_ssim_loss / args.log_interval)
loss_all.append((args.ssim_weight[i] * all_ssim_loss + all_pixel_loss) / args.log_interval)
all_ssim_loss = 0.
all_pixel_loss = 0.
if (batch + 1) % (200 * args.log_interval) == 0:
# save model
densefuse_model.eval()
densefuse_model.cpu()
save_model_filename = args.ssim_path[i] + '/' + "Epoch_" + str(e) + "_iters_" + str(count) + "_" + \
str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + args.ssim_path[i] + ".model"
save_model_path = os.path.join(args.save_model_dir, save_model_filename)
torch.save(densefuse_model.state_dict(), save_model_path)
# save loss data
# pixel loss
loss_data_pixel = np.array(loss_pixel)
loss_filename_path = args.ssim_path[i] + '/' + "loss_pixel_epoch_" + str(
args.epochs) + "_iters_" + str(count) + "_" + str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + \
args.ssim_path[i] + ".mat"
save_loss_path = os.path.join(args.save_loss_dir, loss_filename_path)
scio.savemat(save_loss_path, {'loss_pixel': loss_data_pixel})
# SSIM loss
loss_data_ssim = np.array(loss_ssim)
loss_filename_path = args.ssim_path[i] + '/' + "loss_ssim_epoch_" + str(
args.epochs) + "_iters_" + str(count) + "_" + str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + \
args.ssim_path[i] + ".mat"
save_loss_path = os.path.join(args.save_loss_dir, loss_filename_path)
scio.savemat(save_loss_path, {'loss_ssim': loss_data_ssim})
# all loss
loss_data_total = np.array(loss_all)
loss_filename_path = args.ssim_path[i] + '/' + "loss_total_epoch_" + str(
args.epochs) + "_iters_" + str(count) + "_" + str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + \
args.ssim_path[i] + ".mat"
save_loss_path = os.path.join(args.save_loss_dir, loss_filename_path)
scio.savemat(save_loss_path, {'loss_total': loss_data_total})
densefuse_model.train()
densefuse_model.cuda()
tbar.set_description("\nCheckpoint, trained model saved at", save_model_path)
# pixel loss
loss_data_pixel = np.array(loss_pixel)
loss_filename_path = args.ssim_path[i] + '/' + "Final_loss_pixel_epoch_" + str(
args.epochs) + "_" + str(time.ctime()).replace(' ', '_').replace(':','_') + "_" + \
args.ssim_path[i] + ".mat"
save_loss_path = os.path.join(args.save_loss_dir, loss_filename_path)
scio.savemat(save_loss_path, {'loss_pixel': loss_data_pixel})
# SSIM loss
loss_data_ssim = np.array(loss_ssim)
loss_filename_path = args.ssim_path[i] + '/' + "Final_loss_ssim_epoch_" + str(
args.epochs) + "_" + str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + \
args.ssim_path[i] + ".mat"
save_loss_path = os.path.join(args.save_loss_dir, loss_filename_path)
scio.savemat(save_loss_path, {'loss_ssim': loss_data_ssim})
# all loss
loss_data_total = np.array(loss_all)
loss_filename_path = args.ssim_path[i] + '/' + "Final_loss_total_epoch_" + str(
args.epochs) + "_" + str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + \
args.ssim_path[i] + ".mat"
save_loss_path = os.path.join(args.save_loss_dir, loss_filename_path)
scio.savemat(save_loss_path, {'loss_total': loss_data_total})
# save model
densefuse_model.eval()
densefuse_model.cpu()
save_model_filename = args.ssim_path[i] + '/' "Final_epoch_" + str(args.epochs) + "_" + \
str(time.ctime()).replace(' ', '_').replace(':', '_') + "_" + args.ssim_path[i] + ".model"
save_model_path = os.path.join(args.save_model_dir, save_model_filename)
torch.save(densefuse_model.state_dict(), save_model_path)
print("\nDone, trained model saved at", save_model_path)
if __name__ == "__main__":
main()
3、测试代码
# test phase
import torch
from torch.autograd import Variable
from net import DenseFuseNet
import utils
from args_fusion import args
import numpy as np
import time
import cv2
import os
def load_model(path, input_nc, output_nc):
nest_model = DenseFuseNet(input_nc, output_nc)
nest_model.load_state_dict(torch.load(path))
para = sum([np.prod(list(p.size())) for p in nest_model.parameters()])
type_size = 4
print('Model {} : params: {:4f}M'.format(nest_model._get_name(), para * type_size / 1000 / 1000))
nest_model.eval()
nest_model.cuda()
return nest_model
def _generate_fusion_image(model, strategy_type, img1, img2):
# encoder
# test = torch.unsqueeze(img_ir[:, i, :, :], 1)
en_r = model.encoder(img1)
# vision_features(en_r, 'ir')
en_v = model.encoder(img2)
# vision_features(en_v, 'vi')
# fusion
f = model.fusion(en_r, en_v, strategy_type=strategy_type)
# f = en_v
# decoder
img_fusion = model.decoder(f)
return img_fusion[0]
def run_demo(model, infrared_path, visible_path, output_path_root, index, fusion_type, network_type, strategy_type, ssim_weight_str, mode):
# if mode == 'L':
ir_img = utils.get_test_images(infrared_path, height=None, width=None, mode=mode)
vis_img = utils.get_test_images(visible_path, height=None, width=None, mode=mode)
# else:
# img_ir = utils.tensor_load_rgbimage(infrared_path)
# img_ir = img_ir.unsqueeze(0).float()
# img_vi = utils.tensor_load_rgbimage(visible_path)
# img_vi = img_vi.unsqueeze(0).float()
# dim = img_ir.shape
if args.cuda:
ir_img = ir_img.cuda()
vis_img = vis_img.cuda()
ir_img = Variable(ir_img, requires_grad=False)
vis_img = Variable(vis_img, requires_grad=False)
dimension = ir_img.size()
img_fusion = _generate_fusion_image(model, strategy_type, ir_img, vis_img)
# multi outputs ##############################################
file_name = 'fusion_' + fusion_type + '_' + str(index) + '_network_' + network_type + '_' + strategy_type + '_' + ssim_weight_str + '.png'
output_path = output_path_root + file_name
# # save images
# utils.save_image_test(img_fusion, output_path)
# utils.tensor_save_rgbimage(img_fusion, output_path)
if args.cuda:
img = img_fusion.cpu().clamp(0, 255).data[0].numpy()
else:
img = img_fusion.clamp(0, 255).data[0].numpy()
img = img.transpose(1, 2, 0).astype('uint8')
utils.save_images(output_path, img)
print(output_path)
def vision_features(feature_maps, img_type):
count = 0
for features in feature_maps:
count += 1
for index in range(features.size(1)):
file_name = 'feature_maps_' + img_type + '_level_' + str(count) + '_channel_' + str(index) + '.png'
output_path = 'outputs/feature_maps/' + file_name
map = features[:, index, :, :].view(1, 1, features.size(2), features.size(3))
map = map*255
# save images
utils.save_image_test(map, output_path)
def main():
# run demo
# test_path = "images/test-RGB/"
test_path = "images/IV_images/"
network_type = 'densefuse'
fusion_type = 'auto' # auto, fusion_layer, fusion_all
strategy_type_list = ['addition', 'attention_weight'] # addition, attention_weight, attention_enhance, adain_fusion, channel_fusion, saliency_mask
output_path = './outputs/'
strategy_type = strategy_type_list[0]
if os.path.exists(output_path) is False:
os.mkdir(output_path)
# in_c = 3 for RGB images; in_c = 1 for gray images
in_c = 1
if in_c == 1:
out_c = in_c
mode = 'L'
model_path = args.model_path_gray
else:
out_c = in_c
mode = 'RGB'
model_path = args.model_path_rgb
with torch.no_grad():
print('SSIM weight ----- ' + args.ssim_path[2])
ssim_weight_str = args.ssim_path[2]
model = load_model(model_path, in_c, out_c)
for i in range(1):
index = i + 1
infrared_path = test_path + 'IR' + str(index) + '.jpg'
visible_path = test_path + 'VIS' + str(index) + '.jpg'
run_demo(model, infrared_path, visible_path, output_path, index, fusion_type, network_type, strategy_type, ssim_weight_str, mode)
print('Done......')
if __name__ == '__main__':
main()