语义分割评价指标,附代码可直接运行
语义分割有三大评价指标,有代码直接调试
- 执行时间(execution time)
- 内存占用(memory footprint)
- 准确性(accuracy)
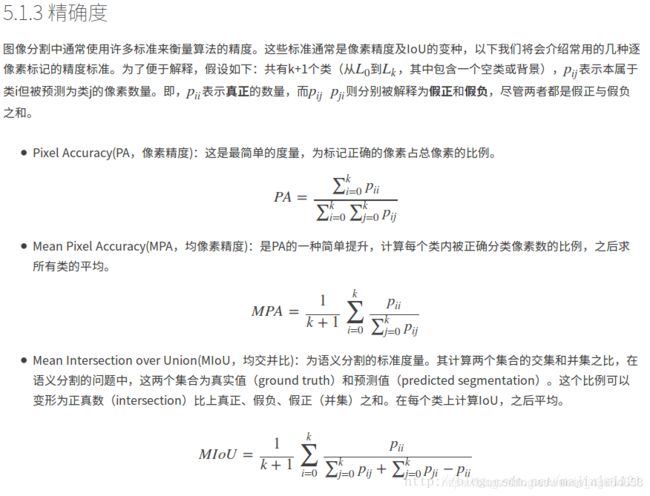
一般分割有k+1类(本文就是两个目标类和一个背景类),Pi表示本属于i类却预测为j类的像素点总数;
Pixel accuracy(PA)
分类正确的像素点与所有的像素点数的比例
def Pixel_Accuracy(self):
# acc = (TP + TN) / (TP + TN + FP + TN)
Acc = np.diag(self.confusion_matrix).sum() / \
self.confusion_matrix.sum()
return Acc
mean pixel accuracy(MPA)
计算每一类分类正确的像素点和该类的所有的像素点的比例然后求平均
def Pixel_Accuracy_Class(self):
# acc = (TP) / TP + FP
Acc = np.diag(self.confusion_matrix) / \
self.confusion_matrix.sum(axis=1)
Acc_class = np.nanmean(Acc)
return Acc_class
mean intersection over union(MIOU)
计算每一类的iou然后求平均(交并比)。
iou一般都是基于类进行计算的,也有对图片进行计算的;
基于类进行计算的iou就是每个类的iou计算之后累加,再进行平均,得到的就是基于全局的评价MIOU。
def Mean_Intersection_over_Union(self):
MIoU = np.diag(self.confusion_matrix) / (
np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -
np.diag(self.confusion_matrix))
MIoU = np.nanmean(MIoU)
return MIoU
frequencecy weighted intersection over union (FWIOU)
理解为根据每一类出现的频率对每一类的iou进行加权求和。
def Frequency_Weighted_Intersection_over_Union(self):
# FWIOU = [(TP+FN)/(TP+FP+TN+FN)] *[TP / (TP + FP + FN)]
freq = np.sum(self.confusion_matrix, axis=1) / \
np.sum(self.confusion_matrix)
iu = np.diag(self.confusion_matrix) / (
np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -
np.diag(self.confusion_matrix))
FWIoU = (freq[freq > 0] * iu[freq > 0]).sum()
return FWIoU
混淆矩阵
def _generate_matrix(self, gt_image, pre_image):
mask = (gt_image >= 0) & (gt_image < self.num_class)
label = self.num_class * gt_image[mask].astype('int') + pre_image[mask]
count = np.bincount(label, minlength=self.num_class**2)
confusion_matrix = count.reshape(self.num_class, self.num_class)
return confusion_matrix
公式可上网查阅。
import numpy as np
import cv2
"""
confusionMetric,真真假假
P\L P N
P TP FP
N FN TN
"""
class Evaluator(object):
def __init__(self, num_class):
self.num_class = num_class
self.confusion_matrix = np.zeros((self.num_class,)*2)
def Pixel_Accuracy(self):
# acc = (TP + TN) / (TP + TN + FP + TN)
Acc = np.diag(self.confusion_matrix).sum() / \
self.confusion_matrix.sum()
return Acc
def Pixel_Accuracy_Class(self):
# acc = (TP) / TP + FP
Acc = np.diag(self.confusion_matrix) / \
self.confusion_matrix.sum(axis=1)
Acc_class = np.nanmean(Acc)
return Acc_class
def Mean_Intersection_over_Union(self):
MIoU = np.diag(self.confusion_matrix) / (
np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -
np.diag(self.confusion_matrix))
MIoU = np.nanmean(MIoU)
return MIoU
def Frequency_Weighted_Intersection_over_Union(self):
# FWIOU = [(TP+FN)/(TP+FP+TN+FN)] *[TP / (TP + FP + FN)]
freq = np.sum(self.confusion_matrix, axis=1) / \
np.sum(self.confusion_matrix)
iu = np.diag(self.confusion_matrix) / (
np.sum(self.confusion_matrix, axis=1) + np.sum(self.confusion_matrix, axis=0) -
np.diag(self.confusion_matrix))
FWIoU = (freq[freq > 0] * iu[freq > 0]).sum()
return FWIoU
def _generate_matrix(self, gt_image, pre_image):
mask = (gt_image >= 0) & (gt_image < self.num_class)
label = self.num_class * gt_image[mask].astype('int') + pre_image[mask]
count = np.bincount(label, minlength=self.num_class**2)
confusion_matrix = count.reshape(self.num_class, self.num_class)
return confusion_matrix
def add_batch(self, gt_image, pre_image):
assert gt_image.shape == pre_image.shape
self.confusion_matrix += self._generate_matrix(gt_image, pre_image)
def reset(self):
self.confusion_matrix = np.zeros((self.num_class,) * 2)
def meansure_pa_miou(num_class, gt_image, pre_image):
metric = Evaluator(num_class)
metric.add_batch(gt_image, pre_image)
acc = metric.Pixel_Accuracy()
mIoU = metric.Mean_Intersection_over_Union()
print("像素准确度PA:", acc, "平均交互度mIOU:", mIoU)
if __name__ == '__main__':
# 求miou,先求混淆矩阵,混淆矩阵的每一行再加上每一列,最后减去对角线上的值;
# imgPredict = np.array([[0, 0, 1, 0], [1, 1, 0, 2], [2, 2, 1 ,0]])
# imgLabel = np.array([[0, 0, 0, 1], [1, 1, 2, 2], [2, 2, 0, 0]])
i = 0
for i in range(20):
imgPredict_0 = cv2.imread("datas/test/outputs/20_"+str(i)+"/20_"+str(i)+"_0.png")
imgPredict_1 = cv2.imread("datas/test/outputs/20_"+str(i)+"/20_"+str(i)+"_1.png")
imgPredict_2 = cv2.imread("datas/test/outputs/20_"+str(i)+"/20_"+str(i)+"_2.png")
imgLabel = cv2.imread("datas/mask/20_"+str(i)+".png")
# 设置成两类与预测图对应
imgLabel_0 = imgLabel.copy()
imgLabel_1 = imgLabel.copy()
imgLabel_2 = imgLabel.copy()
imgLabel_0[imgLabel >= 1] = 1 # 背景1和目标0
height, width, channels = imgLabel_0.shape # 反转
for row in range(height):
for list in range(width):
for c in range(channels):
pv = imgLabel_0[row, list, c]
imgLabel_0[row, list, c] = 1 - pv
imgLabel_1[imgLabel >= 2] = 0 # 把第二类归为背景
imgLabel_2[imgLabel == 1] = 0 # 把第一类归为背景
imgLabel_2[imgLabel == 2] = 1
print(i)
meansure_pa_miou(2, imgLabel_0, imgPredict_0)
meansure_pa_miou(2, imgLabel_1, imgPredict_1)
meansure_pa_miou(2, imgLabel_2, imgPredict_2)