论文阅读——U-Net: Convolutional Networks for Biomedical Image Segmentation pytorch论文复现
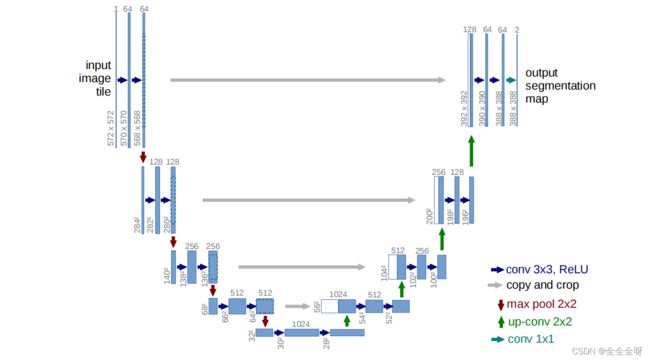
前言:UNet是发表在2015年的关于医学图像分割的一篇论文,论文地址点击这里。Unet网络结构也是采取的编码器-解码器架构,四次下采样(maxpooling),四次上采样(转置卷积),形成了U型结构,网络结构由下图所示:
网上已经有很多关于这篇论文阅读的文章,可以自己搜索一下,也可以参考这篇文章,我感觉是比较详细的,这里我主要放一下复现这篇文章的代码(使用Pytorch框架实现)。
一、数据加载部分
首先,数据集链接,对数据的预处理见下面的代码:
# data.py文件用来进行数据集的制作
import os
from torch.utils.data import Dataset
from utils import *
from torchvision import transforms
transform=transforms.Compose([
transforms.ToTensor()
])
class MyDataset(Dataset):
def __init__(self,path):
self.path=path
self.name=os.listdir(os.path.join(path,'SegmentationClass')) # 拼接取出SegmentationClass文件夹下面的所有图片
def __len__(self):
return len(self.name)
def __getitem__(self, index):
segment_name=self.name[index] #图片的名称
segment_path=os.path.join(self.path,'SegmentationClass',segment_name)
image_path=os.path.join(self.path,'JPEGImages',segment_name.replace('png','jpg'))
segment_image=keep_image_size_open(segment_path)
image=keep_image_size_open(image_path) # utils包下面的函数,用来处理图片的大小(将大小不一的图片变成同样的像素值便于之后的训练)
return transform(image),transform(segment_image) # 变成Tensor
if __name__ == '__main__':
data=MyDataset('D:\workspace\Pycharm\pytorch-unet-master\pytorch-unet-master\VOCtrainval_11-May-2012\VOCdevkit\VOC2012')
print(data[0][0].shape)
print(data[0][1].shape)
utils文件代码如下:
# utils.py文件保存一些工具函数
from PIL import Image
def keep_image_size_open(path, size=(256, 256)):
#处理图片的大小
img = Image.open(path)
temp = max(img.size)
mask = Image.new('RGB', (temp, temp), (0, 0, 0))
mask.paste(img, (0, 0)) #将图片粘贴到左上角
mask = mask.resize(size)
return mask
二、Unet网络结构
根据上面论文里面Unet的网络架构图定义Unet的网络架构
#net.py定义网络结构
import torch
from torch import nn
from torch.nn import functional as F
class Conv_Block(nn.Module):
# 定义一个卷积块,使用的Sequential实例
def __init__(self,in_channel,out_channel):
super(Conv_Block, self).__init__()
self.layer=nn.Sequential(
nn.Conv2d(in_channel,out_channel,3,1,1,padding_mode='reflect',bias=False),
nn.BatchNorm2d(out_channel),
nn.Dropout2d(0.3),
nn.LeakyReLU(),
nn.Conv2d(out_channel, out_channel, 3, 1, 1, padding_mode='reflect', bias=False),
nn.BatchNorm2d(out_channel),
nn.Dropout2d(0.3),
nn.LeakyReLU()
)
def forward(self,x):
return self.layer(x)
class DownSample(nn.Module):
# 进行下采样
def __init__(self,channel):
super(DownSample, self).__init__()
self.layer=nn.Sequential(
nn.Conv2d(channel,channel,3,2,1,padding_mode='reflect',bias=False),
nn.BatchNorm2d(channel),
nn.LeakyReLU()
)
def forward(self,x):
return self.layer(x)
class UpSample(nn.Module):
# 进行上采样
def __init__(self,channel):
super(UpSample, self).__init__()
self.layer=nn.Conv2d(channel,channel//2,1,1)
def forward(self,x,feature_map):
up=F.interpolate(x,scale_factor=2,mode='nearest')
out=self.layer(up)
return torch.cat((out,feature_map),dim=1)
class UNet(nn.Module):
def __init__(self):
#根据网络结构图组合上面定义好的模块
super(UNet, self).__init__()
self.c1=Conv_Block(3,64)
self.d1=DownSample(64)
self.c2=Conv_Block(64,128)
self.d2=DownSample(128)
self.c3=Conv_Block(128,256)
self.d3=DownSample(256)
self.c4=Conv_Block(256,512)
self.d4=DownSample(512)
self.c5=Conv_Block(512,1024)
self.u1=UpSample(1024)
self.c6=Conv_Block(1024,512)
self.u2 = UpSample(512)
self.c7 = Conv_Block(512, 256)
self.u3 = UpSample(256)
self.c8 = Conv_Block(256, 128)
self.u4 = UpSample(128)
self.c9 = Conv_Block(128, 64)
self.out=nn.Conv2d(64,3,3,1,1)
# 进行输出
self.Th=nn.Sigmoid()
# 使用Sigmoid()函数进行激活
def forward(self,x):
# 计算前向传播
R1=self.c1(x)
R2=self.c2(self.d1(R1))
R3 = self.c3(self.d2(R2))
R4 = self.c4(self.d3(R3))
R5 = self.c5(self.d4(R4))
O1=self.c6(self.u1(R5,R4))
O2 = self.c7(self.u2(O1, R3))
O3 = self.c8(self.u3(O2, R2))
O4 = self.c9(self.u4(O3, R1))
return self.Th(self.out(O4))
if __name__ == '__main__':
x=torch.randn(2,3,256,256)
net=UNet()
print(net(x).shape)
三、进行训练
接下来就要根据网络结构进行训练
# train.py对定义好的网络进行训练
import os
from torch import nn,optim
import torch
from torch.utils.data import DataLoader
from data import *
from net import *
from torchvision.utils import save_image
device=torch.device('cuda' if torch.cuda.is_available() else 'cpu')
weight_path='params/unet.pth' # 训练好的网络模型参数保存地址
data_path=r'data'
save_path='train_image' #保存训练好的图片
if __name__ == '__main__':
data_loader=DataLoader(MyDataset(data_path),batch_size=4,shuffle=True)
net=UNet().to(device)
# 判断之前是否进行过训练,选择是否加载训练权重文件
if os.path.exists(weight_path):
net.load_state_dict(torch.load(weight_path))
print('successful load weight!')
else:
print('not successful load weight')
# 定义优化和损失函数
opt=optim.Adam(net.parameters())
loss_fun=nn.BCELoss()
# 进行训练
epoch=1
while True:
for i,(image,segment_image) in enumerate(data_loader):
image, segment_image=image.to(device),segment_image.to(device)
out_image=net(image)
train_loss=loss_fun(out_image,segment_image)
opt.zero_grad()
train_loss.backward()
opt.step()
if i%5==0:
print(f'{epoch}-{i}-train_loss===>>{train_loss.item()}')
if i%50==0:
torch.save(net.state_dict(),weight_path)
_image=image[0]
_segment_image=segment_image[0]
_out_image=out_image[0]
img=torch.stack([_image,_segment_image,_out_image],dim=0)
save_image(img,f'{save_path}/{i}.png')
epoch+=1
四、训练结果
当loss收敛到0.06左右时

图片分割效果:
