mediapipe学习-手势识别windows(2)
前言
前面已经讲过怎么搭建环境了,也简单的讲述了编译 hand_tracking
1:编译 CPU 版本 hand_tracking
目录结构如下

cd mediapipe ####有WORKSPACE 目录 这里PYTHON目录 F:/softinstalldir/Python/Python38/python.exe
bazel build -c opt --define MEDIAPIPE_DISABLE_GPU=1 --action_env PYTHON_BIN_PATH=“F:/softinstalldir/Python/Python38/python.exe” mediapipe/examples/desktop/hand_tracking:hand_tracking_cpu
注意找不到得包 ,自行下载 参考 mediapipe学习-安装编译windows(1)
编译速度根据本地机器得CPU 有关,用的老机子 第一次编译了好久(i5 3470) 再有就跟网络有关系 会下载很多包下来
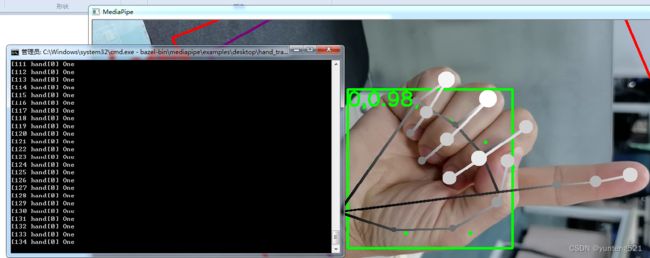
2:修改CODE,增加手势中显示手势的结果打印
// Copyright 2019 The MediaPipe Authors.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
//
// An example of sending OpenCV webcam frames into a MediaPipe graph.
#include
mediapipe::Packet packet_landmarks;
if (m_pPoller_landmarks->QueueSize() > 0)
{
if (m_pPoller_landmarks->Next(&packet_landmarks)) {
// std::vector output_landmarks = packet_landmarks.Get>();
// for (int m = 0; m < output_landmarks.size(); ++m) {
// LOG(INFO) << "output_landmarks.size." << output_landmarks.size();
// break;
// }
std::vector<mediapipe::NormalizedLandmarkList> output_landmarks = packet_landmarks.Get<std::vector<mediapipe::NormalizedLandmarkList>>();
for (int m = 0; m < output_landmarks.size(); ++m) {
// LOG(INFO) << "output_landmarks.size."<< output_landmarks.size(); //1 表示一只手 2 表示2只手
std::vector<PoseInfo> singleHandGestureInfo;
singleHandGestureInfo.clear();
// break;
mediapipe::NormalizedLandmarkList single_hand_NormalizedLandmarkList = output_landmarks[m];
for (int i = 0; i < single_hand_NormalizedLandmarkList.landmark_size(); ++i)
{
PoseInfo info;
const mediapipe::NormalizedLandmark landmark = single_hand_NormalizedLandmarkList.landmark(i);
info.x = landmark.x() * camera_frame.cols;
info.y = landmark.y() * camera_frame.rows;
singleHandGestureInfo.push_back(info);
}
int handres = GestureRecognition(singleHandGestureInfo);
// LOG(INFO) << "[" << m << "] " << GetGestureResult(handres);
std::cout <<"["<< nframe<< " hand[" << m << "] " << GetGestureResult(handres) <<std::endl;
}
}
}else{
LOG(INFO) << "output_landmarks.size is zero.";
}
// Convert back to opencv for display or saving.
cv::Mat output_frame_mat = mediapipe::formats::MatView(&output_frame);
cv::cvtColor(output_frame_mat, output_frame_mat, cv::COLOR_RGB2BGR);
if (save_video) {
if (!writer.isOpened()) {
LOG(INFO) << "Prepare video writer.";
writer.open(absl::GetFlag(FLAGS_output_video_path),
mediapipe::fourcc('a', 'v', 'c', '1'), // .mp4
capture.get(cv::CAP_PROP_FPS), output_frame_mat.size());
RET_CHECK(writer.isOpened());
}
writer.write(output_frame_mat);
} else {
cv::imshow(kWindowName, output_frame_mat);
// Press any key to exit.
const int pressed_key = cv::waitKey(5);
if (pressed_key >= 0 && pressed_key != 255) grab_frames = false;
}
}
LOG(INFO) << "Shutting down.";
if (writer.isOpened()) writer.release();
MP_RETURN_IF_ERROR(graph.CloseInputStream(kInputStream));
return graph.WaitUntilDone();
}
int main(int argc, char** argv) {
google::InitGoogleLogging(argv[0]);
absl::ParseCommandLine(argc, argv);
absl::Status run_status = RunMPPGraph();
if (!run_status.ok()) {
LOG(ERROR) << "Failed to run the graph: " << run_status.message();
return EXIT_FAILURE;
} else {
LOG(INFO) << "Success!";
}
return EXIT_SUCCESS;
}
//手势识别
int GestureRecognition(const std::vector<PoseInfo>& single_hand_joint_vector)
{
if (single_hand_joint_vector.size() != 21)
return -1;
// 大拇指角度
Vector2D thumb_vec1;
thumb_vec1.x = single_hand_joint_vector[0].x - single_hand_joint_vector[2].x;
thumb_vec1.y = single_hand_joint_vector[0].y - single_hand_joint_vector[2].y;
Vector2D thumb_vec2;
thumb_vec2.x = single_hand_joint_vector[3].x - single_hand_joint_vector[4].x;
thumb_vec2.y = single_hand_joint_vector[3].y - single_hand_joint_vector[4].y;
float thumb_angle = Vector2DAngle(thumb_vec1, thumb_vec2);
//std::cout << "thumb_angle = " << thumb_angle << std::endl;
//std::cout << "thumb.y = " << single_hand_joint_vector[0].y << std::endl;
// 食指角度
Vector2D index_vec1;
index_vec1.x = single_hand_joint_vector[0].x - single_hand_joint_vector[6].x;
index_vec1.y = single_hand_joint_vector[0].y - single_hand_joint_vector[6].y;
Vector2D index_vec2;
index_vec2.x = single_hand_joint_vector[7].x - single_hand_joint_vector[8].x;
index_vec2.y = single_hand_joint_vector[7].y - single_hand_joint_vector[8].y;
float index_angle = Vector2DAngle(index_vec1, index_vec2);
//std::cout << "index_angle = " << index_angle << std::endl;
// 中指角度
Vector2D middle_vec1;
middle_vec1.x = single_hand_joint_vector[0].x - single_hand_joint_vector[10].x;
middle_vec1.y = single_hand_joint_vector[0].y - single_hand_joint_vector[10].y;
Vector2D middle_vec2;
middle_vec2.x = single_hand_joint_vector[11].x - single_hand_joint_vector[12].x;
middle_vec2.y = single_hand_joint_vector[11].y - single_hand_joint_vector[12].y;
float middle_angle = Vector2DAngle(middle_vec1, middle_vec2);
//std::cout << "middle_angle = " << middle_angle << std::endl;
// 无名指角度
Vector2D ring_vec1;
ring_vec1.x = single_hand_joint_vector[0].x - single_hand_joint_vector[14].x;
ring_vec1.y = single_hand_joint_vector[0].y - single_hand_joint_vector[14].y;
Vector2D ring_vec2;
ring_vec2.x = single_hand_joint_vector[15].x - single_hand_joint_vector[16].x;
ring_vec2.y = single_hand_joint_vector[15].y - single_hand_joint_vector[16].y;
float ring_angle = Vector2DAngle(ring_vec1, ring_vec2);
//std::cout << "ring_angle = " << ring_angle << std::endl;
// 小拇指角度
Vector2D pink_vec1;
pink_vec1.x = single_hand_joint_vector[0].x - single_hand_joint_vector[18].x;
pink_vec1.y = single_hand_joint_vector[0].y - single_hand_joint_vector[18].y;
Vector2D pink_vec2;
pink_vec2.x = single_hand_joint_vector[19].x - single_hand_joint_vector[20].x;
pink_vec2.y = single_hand_joint_vector[19].y - single_hand_joint_vector[20].y;
float pink_angle = Vector2DAngle(pink_vec1, pink_vec2);
//std::cout << "pink_angle = " << pink_angle << std::endl;
// 根据角度判断手势
float angle_threshold = 65;
float thumb_angle_threshold = 40;
int result = -1;
if ((thumb_angle > thumb_angle_threshold) && (index_angle > angle_threshold) && (middle_angle > angle_threshold) && (ring_angle > angle_threshold) && (pink_angle > angle_threshold))
result = Gesture::Fist;
else if ((thumb_angle > 5) && (index_angle < angle_threshold) && (middle_angle > angle_threshold) && (ring_angle > angle_threshold) && (pink_angle > angle_threshold))
result = Gesture::One;
else if ((thumb_angle > thumb_angle_threshold) && (index_angle < angle_threshold) && (middle_angle < angle_threshold) && (ring_angle > angle_threshold) && (pink_angle > angle_threshold))
result = Gesture::Two;
else if ((thumb_angle > thumb_angle_threshold) && (index_angle < angle_threshold) && (middle_angle < angle_threshold) && (ring_angle < angle_threshold) && (pink_angle > angle_threshold))
result = Gesture::Three;
else if ((thumb_angle > thumb_angle_threshold) && (index_angle < angle_threshold) && (middle_angle < angle_threshold) && (ring_angle < angle_threshold) && (pink_angle < angle_threshold))
result = Gesture::Four;
else if ((thumb_angle < thumb_angle_threshold) && (index_angle < angle_threshold) && (middle_angle < angle_threshold) && (ring_angle < angle_threshold) && (pink_angle < angle_threshold))
result = Gesture::Five;
else if ((thumb_angle < thumb_angle_threshold) && (index_angle > angle_threshold) && (middle_angle > angle_threshold) && (ring_angle > angle_threshold) && (pink_angle < angle_threshold))
result = Gesture::Six;
else if ((thumb_angle < thumb_angle_threshold) && (index_angle > angle_threshold) && (middle_angle > angle_threshold) && (ring_angle > angle_threshold) && (pink_angle > angle_threshold))
result = Gesture::ThumbUp;
else if ((thumb_angle > 5) && (index_angle > angle_threshold) && (middle_angle < angle_threshold) && (ring_angle < angle_threshold) && (pink_angle < angle_threshold))
result = Gesture::Ok;
else
result = -1;
return result;
}
float Vector2DAngle(const Vector2D& vec1, const Vector2D& vec2)
{
double PI = 3.141592653;
float t = (vec1.x * vec2.x + vec1.y * vec2.y) / (sqrt(pow(vec1.x, 2) + pow(vec1.y, 2)) * sqrt(pow(vec2.x, 2) + pow(vec2.y, 2)));
float angle = acos(t) * (180 / PI);
return angle;
}
std::string GetGestureResult(int result)
{
std::string result_str = "无";
switch (result)
{
case 1:
result_str = "One";
break;
case 2:
result_str = "Two";
break;
case 3:
result_str = "Three";
break;
case 4:
result_str = "Four";
break;
case 5:
result_str = "Five";
break;
case 6:
result_str = "Six";
break;
case 7:
result_str = "ThumbUp";
break;
case 8:
result_str = "Ok";
break;
case 9:
result_str = "Fist";
break;
default:
break;
}
return result_str;
}
hand_tracking_data.h 这个文件参考了别人的
#ifndef HANDS_TRACKING_DATA_H
#define HANDS_TRACKING_DATA_H
struct PoseInfo {
float x;
float y;
};
typedef PoseInfo Point2D;
typedef PoseInfo Vector2D;
struct GestureRecognitionResult
{
int m_Gesture_Recognition_Result[2] = {-1,-1};
int m_HandUp_HandDown_Detect_Result[2] = {-1,-1};
};
enum Gesture
{
NoGesture = -1,
One = 1,
Two = 2,
Three = 3,
Four = 4,
Five = 5,
Six = 6,
ThumbUp = 7,
Ok = 8,
Fist = 9
};
#endif // !HANDS_TRACKING_DATA_H
修改BUILD
cc_library(
name = "demo_run_graph_main",
srcs = ["demo_run_graph_main.cc","hand_tracking_data.h"], #这里增加 hand_tracking_data.h
deps = [
"//mediapipe/framework/formats:landmark_cc_proto", #这句是增加的
"//mediapipe/framework:calculator_framework",
.............................................
.............................................
],
)
3:运行测试
4: 下章讲述android版本 手势识别 实现