2022年模式识别高峰论坛学习与个人感悟

0 前面的话
看了报告的具体分析内容与分主题,也不知道和自己研究方向有什么联系, 从字面上看,大概是无关吧.
但不知道为什么, 内心深处还是想看,想听这些专家们的分享, 即使可能也听不懂, 即使可能也什么也学不到, 即使对自己研究方向没有任何帮助.
但是, 笔者就想看看, 看看模式识别领域发展到什么地步了, 有了哪些进展, 哪些成就. 打开自己视野, 听听别人的想法, 听听别人思考问题站立的角度, 如何提出问题, 如何解决问题. 如何设计自己的模型, 如何站在更高层次上看待问题. 同时, 学习别人的画图技巧,如何把自己建模领域问题 清晰\简单的呈现给听众. 因为敢于分享的东西, 肯定已经分享了很多次, 也经历了很多次的打磨, 笔者相信, 或多或少都会有一些意外收获吧, 哪怕对目前而言没有其他收获.
1背景介绍
模式识别高峰论坛是由中国自动化学会,中国人工智能学会,中国图象图形学学会联合组办的,迄今为止,已经举办了两届。2022年是第二届。地址:https://www.bilibili.com/video/BV1CY4y1i7Pq?spm_id_from=333.851.b_7265636f6d6d656e64.2
2 会议议程

上午5个报告,下午也是五个报告。可以看到,基本上都是大牛, 不是院士就是杰青。
3 上午报告
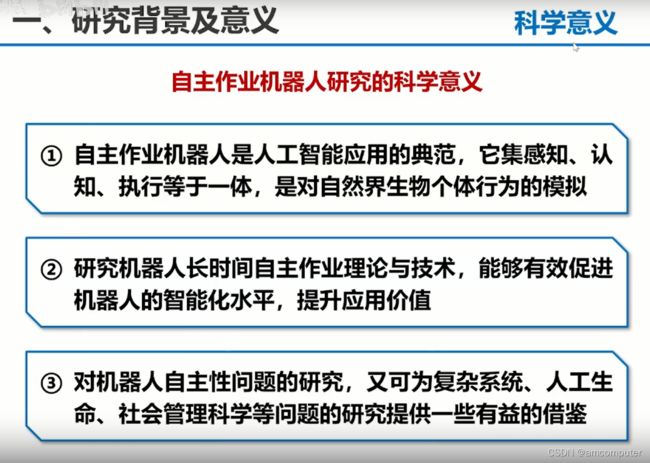
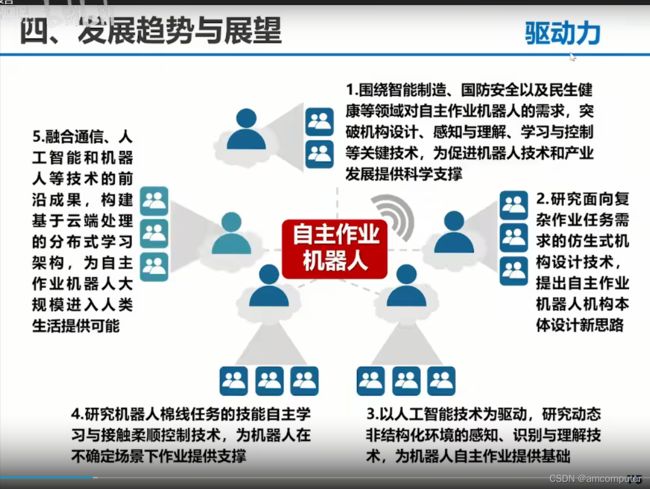
3.1 智能自主作业机器人感知与控制技术及发展趋势-王耀南院士
智能自主作业机器人感知与控制技术及发展趋势-王耀南院士
盛名之下无虚士,下面看看简单介绍:
!!!!!!!!!!!!王老师太强了!!!!!!!!!!!!
一句话总结: 模式识别技术应用到机器人感知领域
智能机器人感知 其实感觉还是比较难的. 大部分使用摄像头来获取信息,


太强大了, 直接模拟动物, 如老鹰抓鱼



看到这里,突然觉得自主作业机器人特别有趣

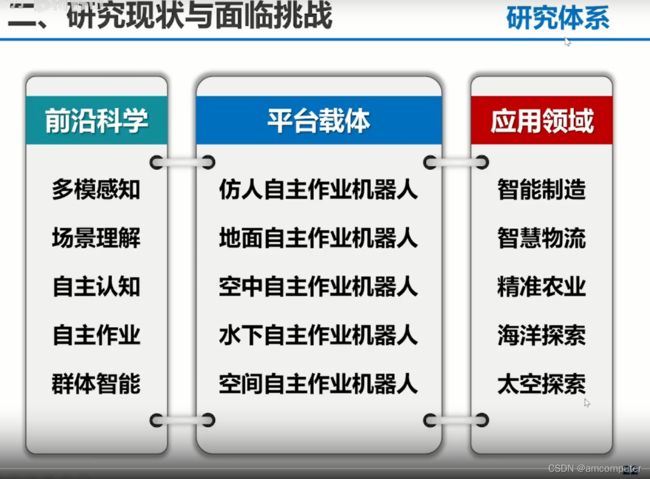
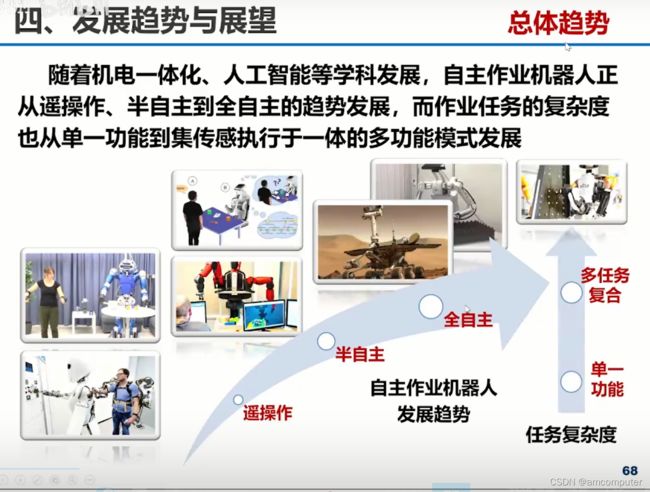
主动作业机器人, 更加精准
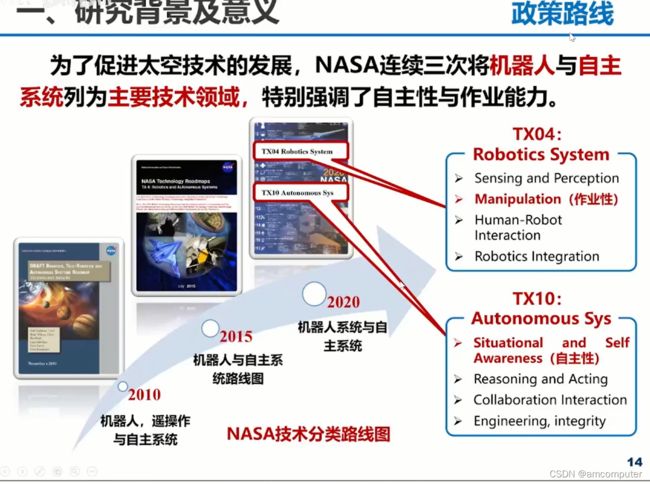

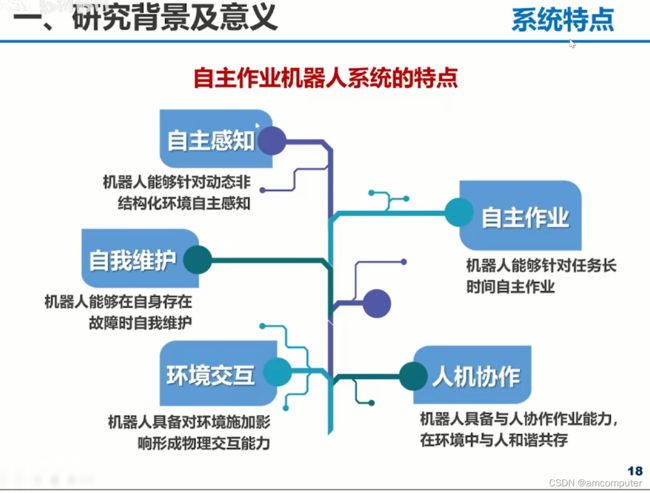

是一个非常复杂的系统
NSC3大期刊上面有很多自主作业机器人工作

在这里插入图片描述

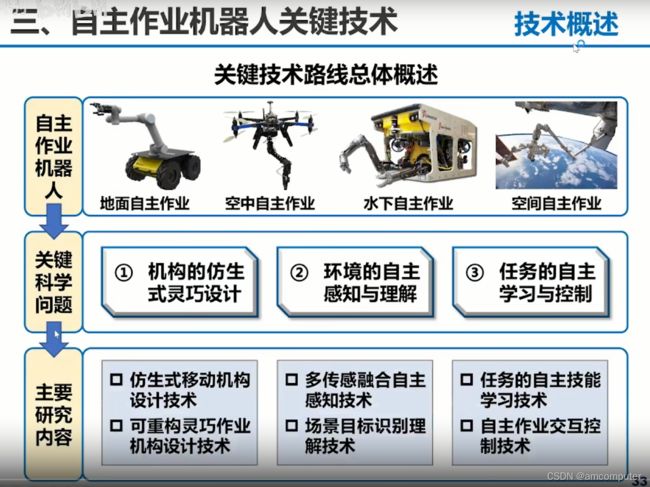
1 机器人仿生灵巧机构
这个确实也比较难, 如何设计 很考虑建模能力.
通过仿真 模拟 ,建模实现

模拟动物
分解形成模块, 然后可以进行重构, 可重用
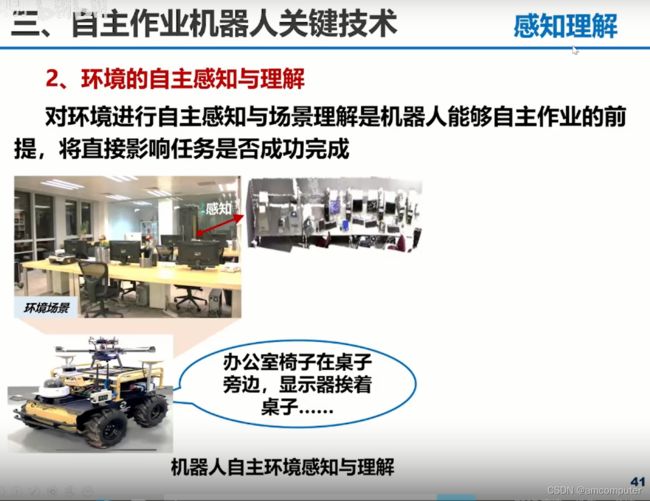
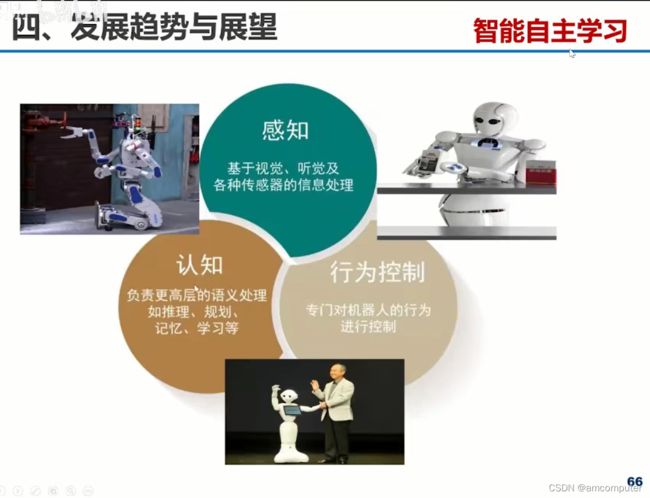
2 机器人环境自主感知与理解
模式识别技术应用
看到这里, 笔者认为加设备 + 改进算法就可以了吧
加设备: 各种摄像头, 红外线等等
人的眼睛, 人的耳朵
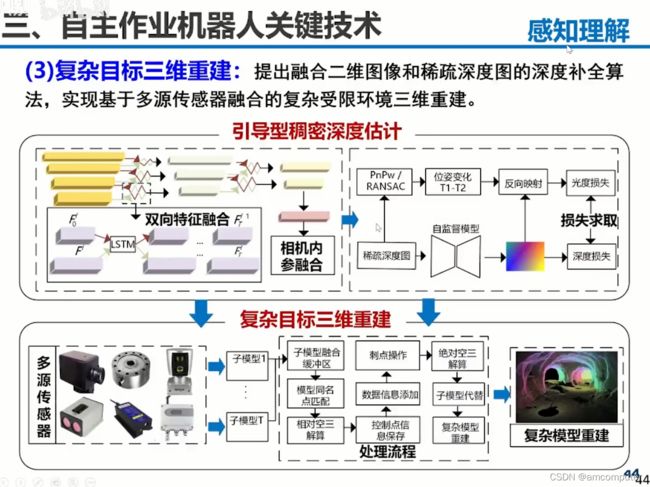
如何形成3维地图

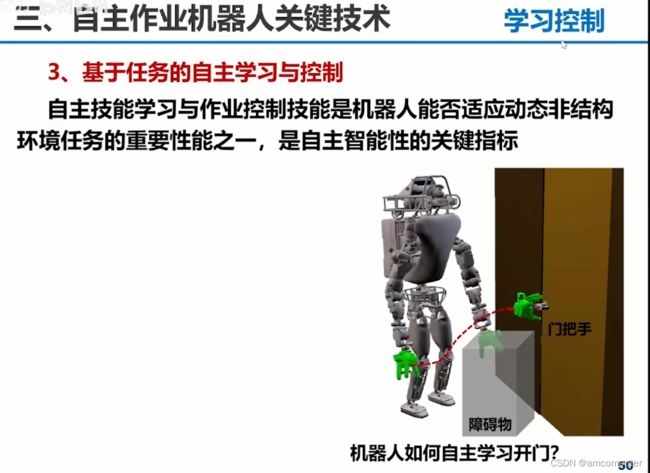
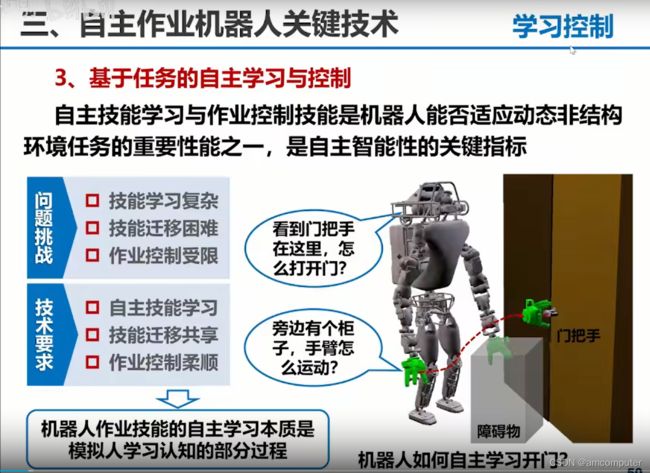
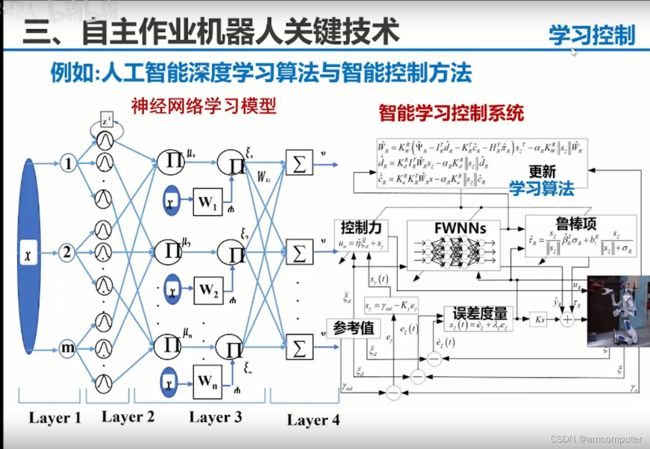
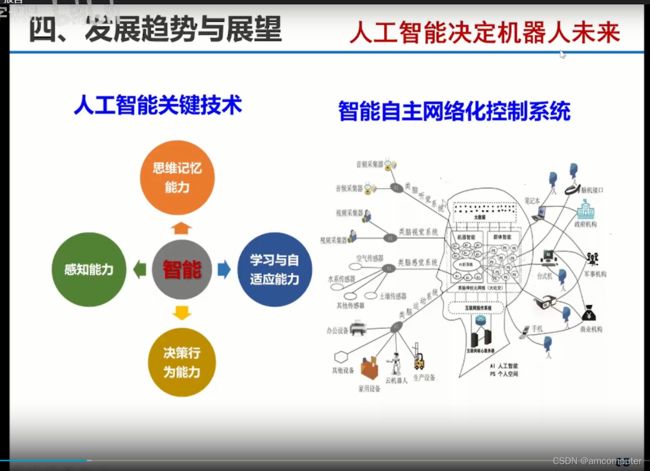
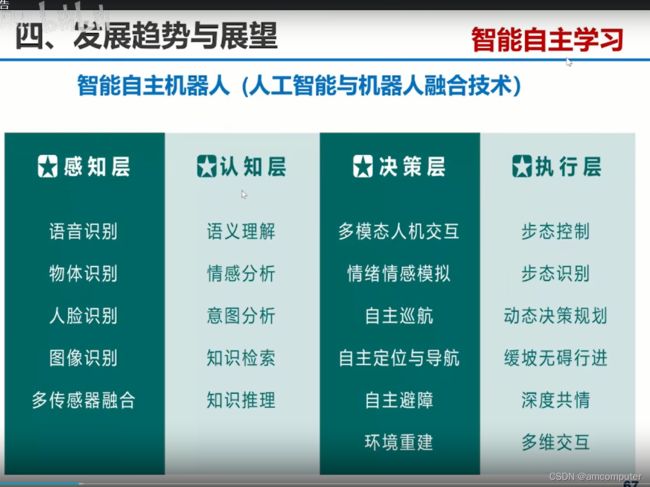
3 机器人自主学习与控制
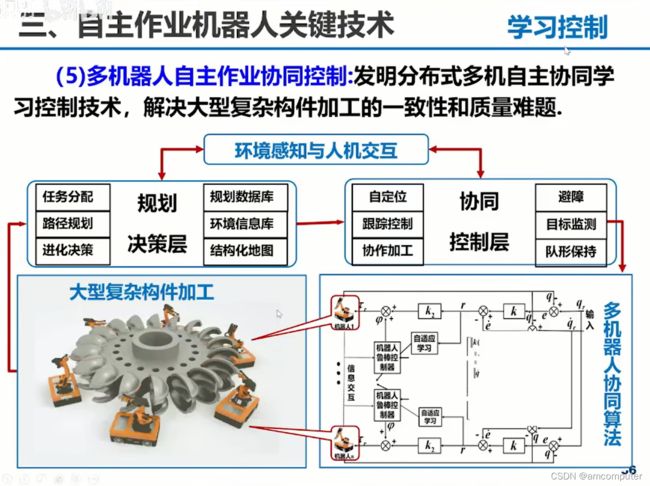

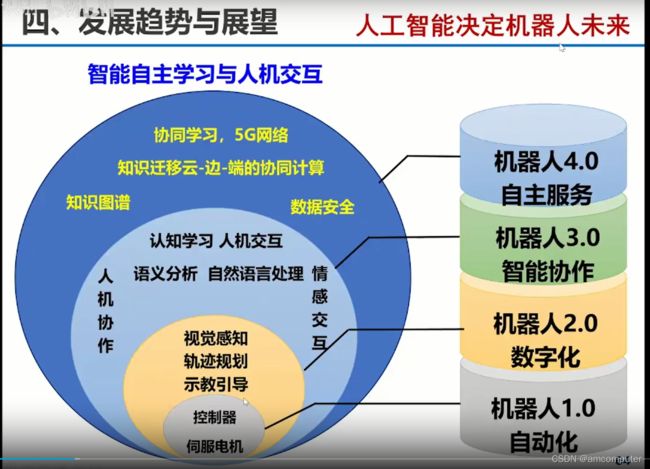
现在处于第3代机器人


提问:
1 应用到模式识别技术, 在应用中遇到的不足之处有哪些,
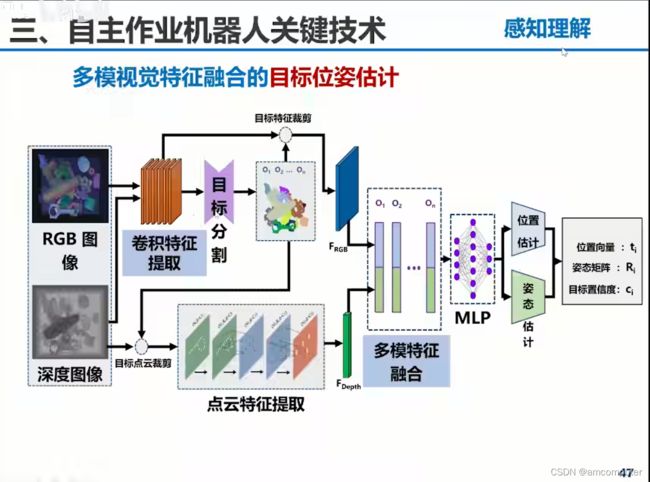
目标检测, 理解 , 把软件结合起来 ,认知比较难, 机器人阅读说明书, 机器能够阅读和理解. 更强的理解能力.
3.2 动态视觉与SLAM:在线学习的途径-查红彬教授
动态视觉与SLAM:在线学习的途径-北大查红彬教授
盛名之下无虚士,下面看看简单介绍:

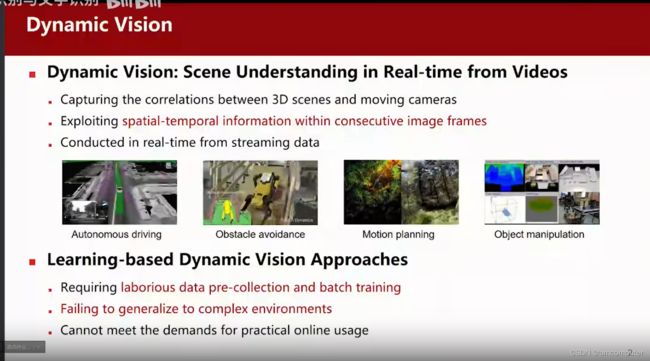
动态视觉问题, 如摄像机运动, 传感器移动
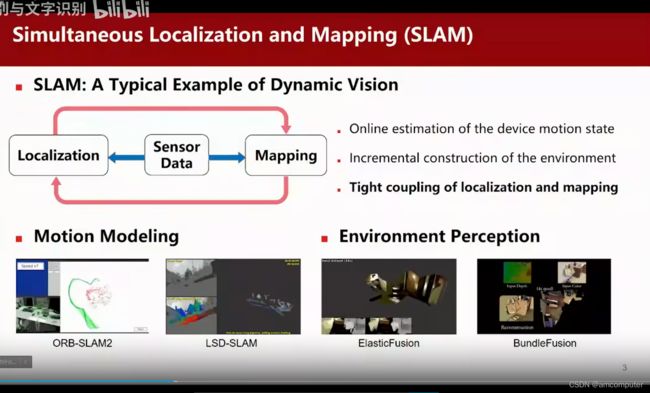
什么叫SLAM
如何去定位和映射传感器
人体本身大脑就是SLAM系统
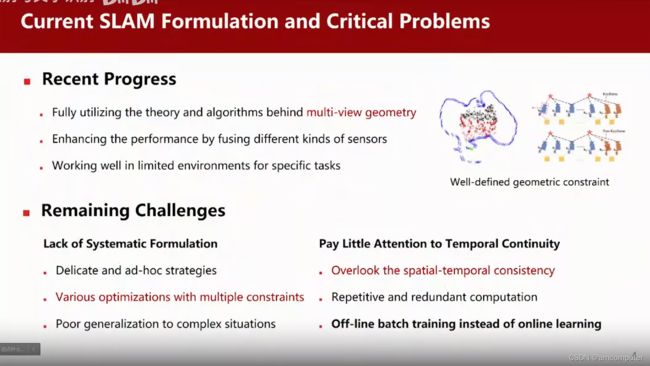
充分利用多视图几何计算技术
利用传感器的信息融合
挑战:
缺乏系统性理论, 不能很好的时序数据进行建模
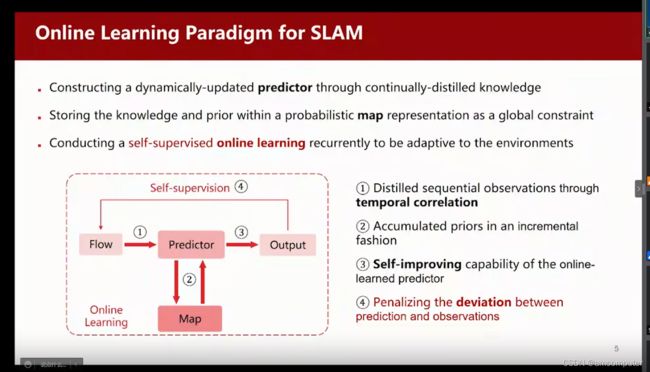
1把数据相关性运用好,flow
2 利用全局性的知识,
3 环境本身的变化, 机器人一个房间到一个房间, 在线知识能力
4 利用好以前的知识 ,地图的表述和利用,几何形象 ,可靠性如何运用

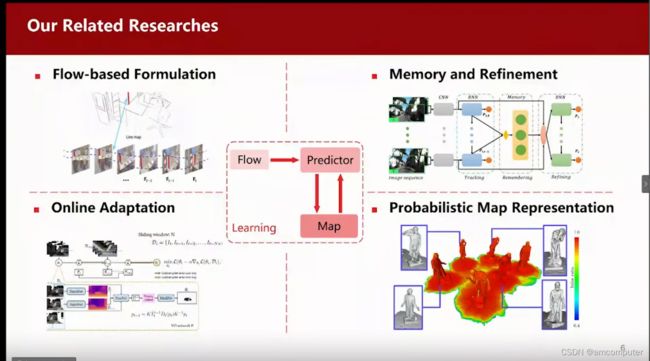
利用好线流
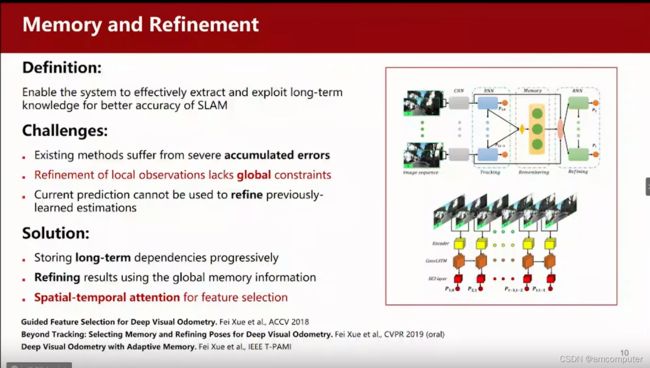
融合空间和时间注意力机制
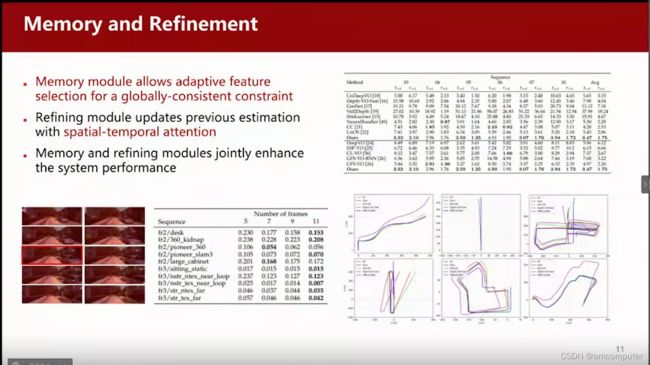
增加了记忆模块
增加了修正模块,可以把它看着后台处理

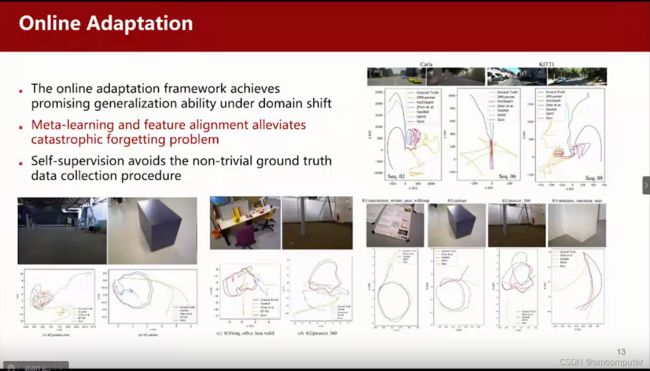
利用元学习和自监督来增加 Domain Shift
利用好返回信息

总的场景定义为一个概率场, 里面的物体的求他存在的概率
最大的挑战是,概率场是离散空间, 如何把收集到的离散数据来表示连续 (通过线流)

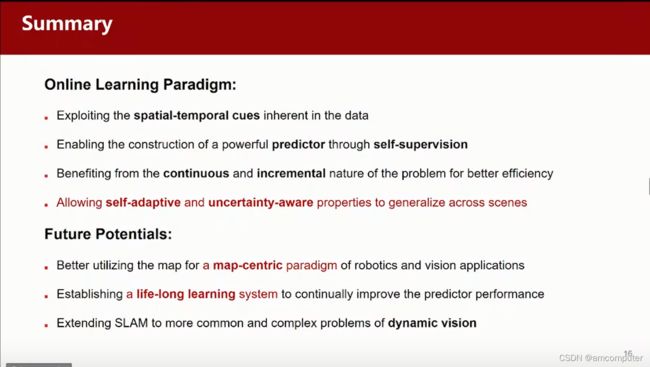
构造在线的预测器
构造有效的地图
提问:
1 loss 方程的设计比较复杂, 空间或者时间, 主要复杂度是不是在优化问题上?
是优化问题, 在线的自监督学习 ,loss 方程 如何设计.视觉有前后关联的, 每个视图点有先后顺序,
不仅把二维和3维, 前后, 跳跃关系用好.
连续性有很大的场景, 为什么要建立全局性的约束条件 , 小变化, 大的结构不分发生太大变化 ,就比较稳定, 地图里面有很多不变的东西, 把不变的东西用好就能解决问题.
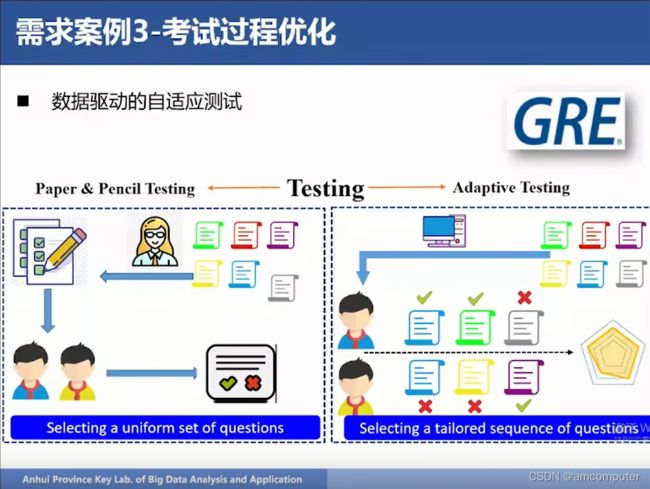
3.3 智能教育的自适应学习技术现状与展望-陈恩红教授
智能教育的自适应学习技术现状与展望-中科大陈恩红教授
盛名之下无虚士,下面看看简单介绍:

将就做了10年的领域


3.4 超声图像AI处理及云平台-李肯立教授
超声图像AI处理及云平台-李肯立教授
盛名之下无虚士,下面看看简单介绍:


3.5 机器人交互过程中的动作意图理解-陈胜勇教授
机器人交互过程中的动作意图理解-陈胜勇教授
盛名之下无虚士,下面看看简单介绍:
4 下午报告
4.1 笔迹鉴别与书写者识别:基于深度学习和领域知识驱动的新方法-金连文教授
笔迹鉴别与书写者识别:基于深度学习和领域知识驱动的新方法-华南理工大学金连文教授
盛名之下无虚士,下面看看简单介绍:
4.2复杂海况五人艇虚实迁移学习方法-上海大学谢少荣教授
复杂海况五人艇虚实迁移学习方法-谢少荣教授
盛名之下无虚士,下面看看简单介绍:

4.3 端云协同下分布式模型学习与进化-吴飞教授
端云协同下分布式模型学习与进化-吴飞教授
盛名之下无虚士,下面看看简单介绍:
4.4 视觉感知:从2D图像到3D点云-杨健教授
视觉感知:从2D图像到3D点云-杨健教授
盛名之下无虚士,下面看看简单介绍:
4.5多媒体确证和深度学习-黄继武教授
多媒体确证和深度学习-黄继武教授
盛名之下无虚士,下面看看简单介绍: