读书笔记:无人机控制(六)
目录
- 基于预测控制的多架小型直升机编队飞行控制
-
- 编队控制
- Leader–Follower 系统
- 基于模型预测控制的控制器设计
-
- 速度控制模型
-
- 平动模型
- 模型预测控制器设计
-
- 模型预测控制
- 控制器设计
基于预测控制的多架小型直升机编队飞行控制
本部分将介绍多架小型无人直升机编队飞行控制,作为 UAV 高级控制的一个示例。自主编队飞行控制系统设计为“领导者–跟随”模型。为了在系统约束下获得良好的控制性能,将“模型预测控制”应用于随动直升机的平动位置控制。在实时最优控制计算中,考虑了运动范围和避碰等位置约束。为了实现对干扰的鲁棒性,使用最小阶干扰观测器来估计不可测量的状态变量和干扰。
编队控制
以鸟类和鱼类为灵感的编队控制是多交通工具系统中的热门话题。在无人机的自主飞行控制中,除了稳定性外,还需要高控制性能。具体可参考机器人编队控制。
在本部分中。首先将直升机动力学建模为线性状态空间方程。其次,利用模型预测控制(MPC)设计了每个跟随器的位置控制器。成本函数以具有终端状态成本的线性二次型形式表示。此外,它还被扩充为一种反映避碰机动和通信范围的形式。
Leader–Follower 系统
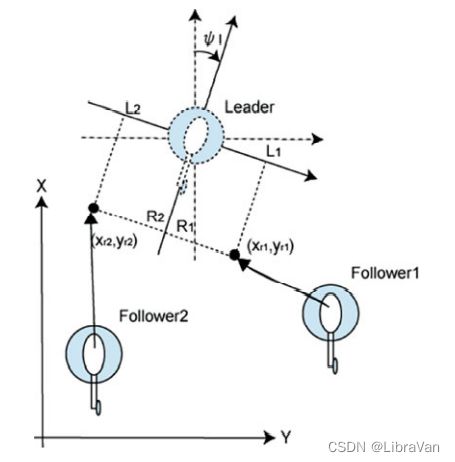
此处由于考虑的是直升机,因而 leader 和 follower 之间的追踪可视为一个二维追踪,即 [ X r p Y r p ] = [ X l + R p cos ψ l − L p sin ψ l Y l + R p sin ψ l + L p cos ψ l ] , p = 1 , 2 , ⋯ , n . \begin{bmatrix} X_{r p} \\ Y_{r p} \end{bmatrix} = \begin{bmatrix} X_{l} + R_{p} \cos \psi_{l} - L_{p} \sin \psi_{l} \\ Y_{l} + R_{p} \sin \psi_{l} + L_{p} \cos \psi_{l}\end{bmatrix}, \quad p = 1, 2, \cdots, n. [XrpYrp]=[Xl+Rpcosψl−LpsinψlYl+Rpsinψl+Lpcosψl],p=1,2,⋯,n.
- X r p / Y r p X_{r p} / Y_{r p} Xrp/Yrp 是 follower 在惯性系中的参考轨迹;
- X l / Y l X_{l} / Y_{l} Xl/Yl 是 leader 在惯性系中的参考轨迹;
- R p / L p R_{p} / L_{p} Rp/Lp 是 follower p p p 相对于 leader 的位置坐标系的偏移量;
- ψ l \psi_{l} ψl 是 leader 的方向角。
基于模型预测控制的控制器设计
本部分介绍一种分层制导控制器的设计方法,该控制器可使每个跟随者跟踪到指定的参考目标和编队结构。
速度控制模型
首先介绍一个基于修正速度模型 G v x = − g b s + b 1 s − a , G v y = g b s + b 1 s − a , \begin{aligned} G_{v x} = - g \frac{b}{s + b} \frac{1}{s - a}, \\ G_{v y} = g \frac{b}{s + b} \frac{1}{s - a}, \end{aligned} Gvx=−gs+bbs−a1,Gvy=gs+bbs−a1, 的平移速度和位置模型。
具体而言,现考虑的坐标体系如下图所示。但由于直升机的平动与垂直运动可以独立考虑,在仅考虑平动时,坐标轴取 X ′ O Y ′ X^{\prime}OY^{\prime} X′OY′。

平动模型
假设其平动速率上界为 5 5 5 m/s,记 x v ′ = [ X ˙ ′ X ¨ ′ Y ˙ ′ Y ¨ ′ ] T {x}^{\prime}_{v} = [\dot{X}^{\prime} \ \ddot{X}^{\prime} \ \dot{Y}^{\prime} \ \ddot{Y}^{\prime}]^{\rm T} xv′=[X˙′ X¨′ Y˙′ Y¨′]T, u ′ ( t ) = [ θ ( t ) ϕ ( t ) ] T u^{\prime}(t) = [\theta(t) \phi(t)]^{\rm T} u′(t)=[θ(t)ϕ(t)]T,其平动模型为 x ˙ v ′ = A v x x ( t ) + B v u ′ ( t ) , y ′ ( t ) = C v x v ′ ( t ) . \begin{aligned} \dot{x}^{\prime}_{v} & = A_{v} x_{x}(t) + B_{v} u^{\prime}(t), \\ y^{\prime}(t) & = C_{v} x^{\prime}_{v}(t). \end{aligned} x˙v′y′(t)=Avxx(t)+Bvu′(t),=Cvxv′(t). 其中, A v = [ 0 1 0 0 a T a − T 0 0 0 0 0 1 0 0 a T a − T ] , B v = [ 0 0 − g T 0 0 0 0 g T ] , C v = [ 1 0 0 0 0 0 1 0 ] , A_{v} = \begin{bmatrix} 0 & 1 & 0 & 0\\ aT & a - T & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 0 & aT & a - T \end{bmatrix}, \quad B_{v} = \begin{bmatrix} 0 & 0 \\ -gT & 0\\ 0 & 0 \\ 0 & gT \end{bmatrix}, \quad C_{v} = \begin{bmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0\end{bmatrix}, Av=⎣⎢⎢⎡0aT001a−T00000aT001a−T⎦⎥⎥⎤,Bv=⎣⎢⎢⎡0−gT00000gT⎦⎥⎥⎤,Cv=[10000100], 且 T = 2.00 T = 2.00 T=2.00, a = 0.20 a = 0.20 a=0.20, g g g 是重力常数。
- 由于速度的测量是在惯性系下进行的,因而需要坐标变换 [ X ˙ Y ˙ ] = [ cos ψ − sin ψ sin ψ cos ψ ] [ X ˙ ′ Y ˙ ′ ] , \begin{bmatrix} \dot{X} \\ \dot{Y} \end{bmatrix} = \begin{bmatrix} \cos \psi & - \sin \psi \\ \sin \psi & \cos \psi \end{bmatrix} \begin{bmatrix} \dot{X}^{\prime} \\ \dot{Y}^{\prime} \end{bmatrix}, [X˙Y˙]=[cosψsinψ−sinψcosψ][X˙′Y˙′], [ u X u Y ] = [ cos ψ − sin ψ sin ψ cos ψ ] [ θ ϕ ] . \begin{bmatrix} u_{X} \\ u_{Y} \end{bmatrix} = \begin{bmatrix} \cos \psi & - \sin \psi \\ \sin \psi & \cos \psi \end{bmatrix} \begin{bmatrix} \theta \\ \phi \end{bmatrix}. [uXuY]=[cosψsinψ−sinψcosψ][θϕ]. 进而得到系统模型为 x ˙ v p a r g u m e n t ( t ) = A v x v p ( t ) + B v u v p + G v r v p , A v = [ A v 0 4 × 2 − C v 0 2 × 2 ] , B v = [ B v 0 2 × 2 ] , G v = [ 0 4 × 2 I 2 ] , x v p a r g u m e n t = [ x v p T ( t ) ε v p T ( t ) ] T . \begin{aligned} & \dot{x} _{v p \ {\rm argument}} (t) = A_{v} x_{v p}(t) + B_{v} u_{v p} + G_{v} r_{vp}, \\ & A_{v} = \begin{bmatrix} A_{v} & 0_{4 \times 2} \\ -C_{v} & 0_{2 \times 2}\end{bmatrix}, \quad B_{v} = \begin{bmatrix} B_{v} & \\ 0_{2 \times 2}\end{bmatrix}, \quad G_{v} = \begin{bmatrix} 0_{4 \times 2} \\ I_{2 }\end{bmatrix}, \\ & x_{vp \ {\rm argument}} = \begin{bmatrix} x_{v p}^{\rm T}(t) & \varepsilon_{v p}^{\rm T}(t) \end{bmatrix}^{\rm T}. \end{aligned} x˙vp argument(t)=Avxvp(t)+Bvuvp+Gvrvp,Av=[Av−Cv04×202×2],Bv=[Bv02×2],Gv=[04×2I2],xvp argument=[xvpT(t)εvpT(t)]T.
- 基于上述模型,将性能指标降至最低的反馈控制输入为 J v p = ∫ 0 ∞ x v p T ( τ ) Q v x v p a r g u m e n t ( τ ) + u v p T ( τ ) R v u v p ( τ ) d τ , Q v ≥ 0 , R v > 0. \begin{aligned} J_{v p} & = \int_{0}^{\infty} x_{v p }^{\rm T}(\tau) Q_{v} x_{v p {\rm argument}}(\tau) + u_{v p}^{\rm T}(\tau) R_{v} u_{v p}(\tau) \; d\tau, \\ Q_{v} & \geq 0, \ R_{v} > 0. \end{aligned} JvpQv=∫0∞xvpT(τ)Qvxvpargument(τ)+uvpT(τ)Rvuvp(τ)dτ,≥0, Rv>0.
- 进一步地,速度闭环系统为 x ˙ v p a r g u m e n t = ( A v − B v F v ) x v p ( t ) + G v r v p ( t ) . \dot{x}_{v p \ {\rm argument}} = (A_{v} - B_{v} F_{v}) x_{v p}(t) + G_{v} r_{v p} (t). x˙vp argument=(Av−BvFv)xvp(t)+Gvrvp(t). 则平移位置模型为 x ˙ p = A x p ( t ) + B r v p ( t ) y p ( t ) = C x p ( t ) . \begin{aligned} \dot{x}_{p} = A x_{p}(t) + B r_{v p}(t) \\ y_{p} (t) = C x_{p}(t). \end{aligned} x˙p=Axp(t)+Brvp(t)yp(t)=Cxp(t). 其中, A = [ 0 0 1 0 0 0 0 0 0 0 0 0 1 0 0 0 0 6 × 1 A v − B v F v ] , A = \begin{bmatrix} 0 & 0 & 1 & 0 & 0 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 & 0 & 0 & 0 \\ 0_{6 \times 1} & & A_{v}& - & B_{v} & F_{v} & & \end{bmatrix}, A=⎣⎡0006×10010Av00−01Bv00Fv0000⎦⎤, B = [ 0 2 × 2 G v ] , C = [ I 2 0 2 × 6 ] , x p ( t ) = [ X p ( t ) Y p ( t ) x v p a r g u m e n t T ] T . B = \begin{bmatrix} 0_{2 \times 2} \\ G_{v}\end{bmatrix}, \quad C = \begin{bmatrix} I_{2} & 0_{2 \times 6}\end{bmatrix}, \quad x_{p}(t) = \begin{bmatrix} X_{p}(t) & Y_{p}(t) & x_{v p \ {\rm argument}}^{\rm T}\end{bmatrix}^{\rm T}. B=[02×2Gv],C=[I202×6],xp(t)=[Xp(t)Yp(t)xvp argumentT]T.
模型预测控制器设计
利用 MPC (Model Predictive Controller) 方法推导了制导控制器。在 MPC 设计中,以二次形式描述性能指标,并考虑到系统的约束,如碰撞避免和通信范围。
模型预测控制
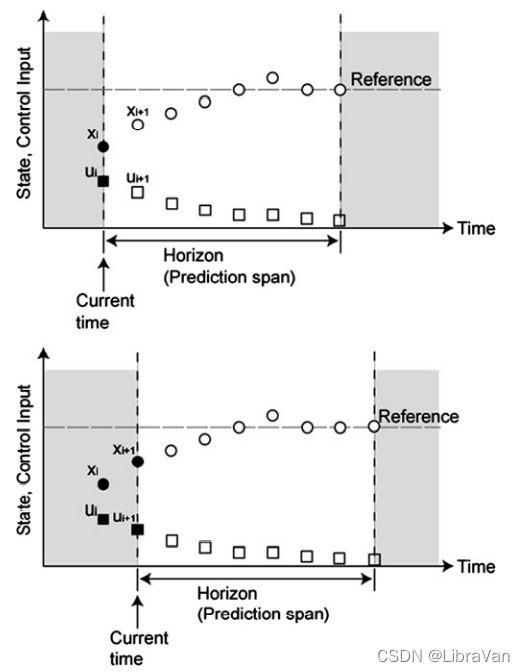
模型预测控制是一种基于模型的控制方法,它在每次考虑系统的轨迹跟踪或约束后,优化从当前时间到未来有限时间的响应。最优控制的范围随着时间的推移而减小,因此,这种方法也被称为后退范围控制。相关可参见模型预测控制介绍。
控制器设计
为了在没有任何跟踪误差的情况下跟踪参考位置设计了伺服系统。扩充状态方程如下 x ˙ p = A x p ( t ) + B r v p ( t ) + G r p ( t ) , A = [ A 0 8 × 2 − C 0 2 × 2 ] , B = [ B 0 2 × 2 ] , G = [ 0 8 × 2 I 2 ] , x p = [ x p T ε p T ] T . \begin{aligned} \dot{x}_{p} & = A x_{p}(t) + B r_{v p}(t) + G r_{p}(t), \\ A & = \begin{bmatrix} A & 0_{8 \times 2} \\ - C & 0_{2 \times 2}\end{bmatrix}, \quad B = \begin{bmatrix} B \\ 0_{2 \times 2}\end{bmatrix}, \quad G = \begin{bmatrix} 0_{8 \times 2} \\ I_{2}\end{bmatrix}, \\ x_{p} & = \begin{bmatrix} x_{p}^{\rm T} & \varepsilon_{p}^{\rm T} \end{bmatrix}^{\rm T}. \end{aligned} x˙pAxp=Axp(t)+Brvp(t)+Grp(t),=[A−C08×202×2],B=[B02×2],G=[08×2I2],=[xpTεpT]T.
接下来在多架直升机的飞行中设置约束,即通信约束和碰撞约束。
- 通信约束。当通过改变 ( R p , L p ) (R_{p}, L_{p}) (Rp,Lp) 来改变队形时。考虑到每架直升机的通信距离,即 X min ≤ X p − X l ≤ X max X_{\min} \leq X_{p} - X_{l} \leq X_{\max} Xmin≤Xp−Xl≤Xmax, Y min ≤ Y p − Y l ≤ Y max Y_{\min} \leq Y_{p} - Y_{l} \leq Y_{\max} Ymin≤Yp−Yl≤Ymax,设置以下约束条件以限制第 p p p 个 follower 的位置, g 1 ( x g a p ) = X min − ( X p − X l ) ≤ 0 , g 2 ( x g a p ) = ( X p − X l ) − X max ≤ 0 , g 3 ( x g a p ) = Y min − ( Y p − Y l ) ≤ 0 , g 4 ( x g a p ) = ( Y p − Y l ) − Y max ≤ 0. \begin{aligned} g_{1} (x_{\rm gap}) & = X_{\min} - (X_{p} - X_{l}) \leq 0, \\ g_{2} (x_{\rm gap}) & = (X_{p} - X_{l}) - X_{\max} \leq 0, \\ g_{3} (x_{\rm gap}) & = Y_{\min} - (Y_{p} - Y_{l}) \leq 0, \\ g_{4} (x_{\rm gap}) & = (Y_{p} - Y_{l}) - Y_{\max} \leq 0. \end{aligned} g1(xgap)g2(xgap)g3(xgap)g4(xgap)=Xmin−(Xp−Xl)≤0,=(Xp−Xl)−Xmax≤0,=Ymin−(Yp−Yl)≤0,=(Yp−Yl)−Ymax≤0.
- 进而设置的惩罚函数为 P j = { [ g j x p − μ k 2 h k ( t ) ] 2 + 3 ( μ k h h ( t ) 2 ) 2 , g j ( x a ) > 0 , ( μ k h k ( t ) ) 3 g j ( x p ) + μ k h k ( t ) , g j ( x a ) ≤ 0. P_{j} = \begin{cases} \left[g_{j}x_{p} - \dfrac{\mu_{k}}{2} h_{k}(t)\right]^{2} + 3 \left(\dfrac{\mu_{k} h_{h}(t)}{2}\right)^{2}, \quad g_{j} (x_{a}) > 0, \\ \dfrac{(\mu_{k} h_{k}(t))^{3}}{g_{j}(x_{p}) + \mu_{k} h_{k}(t)}, \quad g_{j} (x_{a}) \leq 0.\end{cases} Pj=⎩⎪⎪⎨⎪⎪⎧[gjxp−2μkhk(t)]2+3(2μkhh(t))2,gj(xa)>0,gj(xp)+μkhk(t)(μkhk(t))3,gj(xa)≤0. 此处 μ k > μ k + 1 > 0 \mu_{k} > \mu_{k + 1} > 0 μk>μk+1>0, lim k → ∞ μ k = 0 \lim_{k \to \infty} \mu_{k} = 0 limk→∞μk=0, h k ( t ) ≥ 0 h_{k}(t) \geq 0 hk(t)≥0。当 g j < 0 g_{j} < 0 gj<0, h k ( t ) = 0 h_{k}(t) = 0 hk(t)=0是最优轨迹。
- 碰撞约束。在第 p p p 个飞行器处增加人工势函数 P c = L ln [ a p 2 ( X p − X q ) 2 + b p 2 ( Y p − Y q ) 2 ] , K = { K o , ( X p − X q ) 2 + ( Y p − Y q ) 2 < d , 0 , ( X p − X q ) 2 + ( Y p − Y q ) 2 ≥ d . \begin{aligned} P_{c} & = L \ln \left[a_{p}^{2} (X_{p} - X_{q})^{2} + b_{p}^{2} (Y_{p} - Y_{q})^{2}\right], \\ K & = \begin{cases} K_{o}, \quad & \sqrt{(X_{p} - X_{q})^{2} + (Y_{p} - Y_{q})^{2}} < d, \\ 0, \quad & \sqrt{(X_{p} - X_{q})^{2} + (Y_{p} - Y_{q})^{2}} \geq d. \end{cases}\end{aligned} PcK=Lln[ap2(Xp−Xq)2+bp2(Yp−Yq)2],={Ko,0,(Xp−Xq)2+(Yp−Yq)2<d,(Xp−Xq)2+(Yp−Yq)2≥d.
此处, K o K_{o} Ko, a p a_{p} ap, b p b_{p} bp 均为调整性能的参数。
在此约束基础上,进而得到最优实时控制。