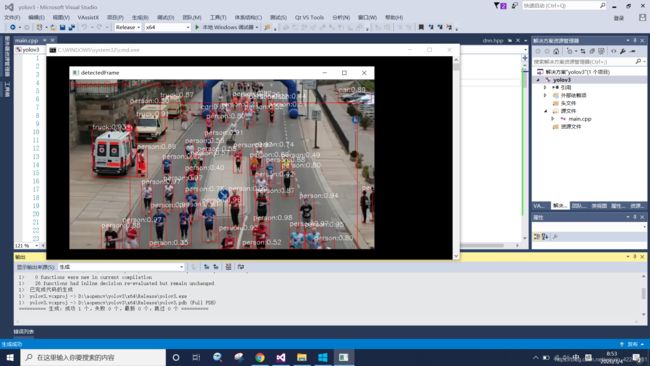
OpenCV3.4.2-YOLOv3实现视频对象检测

下载预训练模型放入工程目录,放入run.mp4视频
yolov3.cfg
yolov3.weights
coco.names
#include